
機(jī)器視覺(jué)篇之相機(jī)標(biāo)定
點(diǎn)擊上方“小白學(xué)視覺(jué)”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

本文轉(zhuǎn)自|新機(jī)器視覺(jué)
在圖像測(cè)量過(guò)程以及機(jī)器視覺(jué)應(yīng)用中,為確定空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系,必須建立相機(jī)成像的幾何模型,這些幾何模型參數(shù)就是相機(jī)參數(shù)。在大多數(shù)條件下這些參數(shù)必須通過(guò)實(shí)驗(yàn)與計(jì)算才能得到,這個(gè)求解參數(shù)的過(guò)程就稱之為相機(jī)標(biāo)定(或攝像機(jī)標(biāo)定)。無(wú)論是在圖像測(cè)量或者機(jī)器視覺(jué)應(yīng)用中,相機(jī)參數(shù)的標(biāo)定都是非常關(guān)鍵的環(huán)節(jié),其標(biāo)定結(jié)果的精度及算法的穩(wěn)定性直接影響相機(jī)工作產(chǎn)生結(jié)果的準(zhǔn)確性。
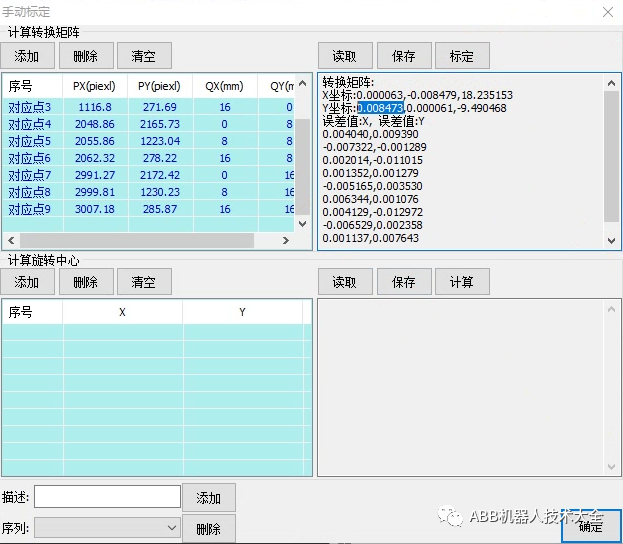
下面實(shí)例中采用靜態(tài)九點(diǎn)標(biāo)定法,從相機(jī)中取好照片,做手動(dòng)標(biāo)定。
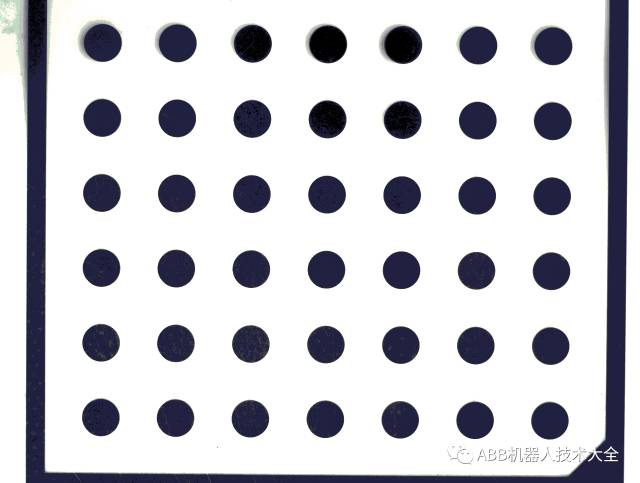
下圖為標(biāo)定板,規(guī)格為2-7×7,此圖沒(méi)顯示完,不影響實(shí)際標(biāo)定,因?yàn)橹蝗D中九點(diǎn)。
選擇某款視覺(jué)平臺(tái)軟件,識(shí)別圖像中圓的像素坐標(biāo)值,這里沒(méi)有太多要求,只做介紹,其它軟件識(shí)別方法或原理類似。
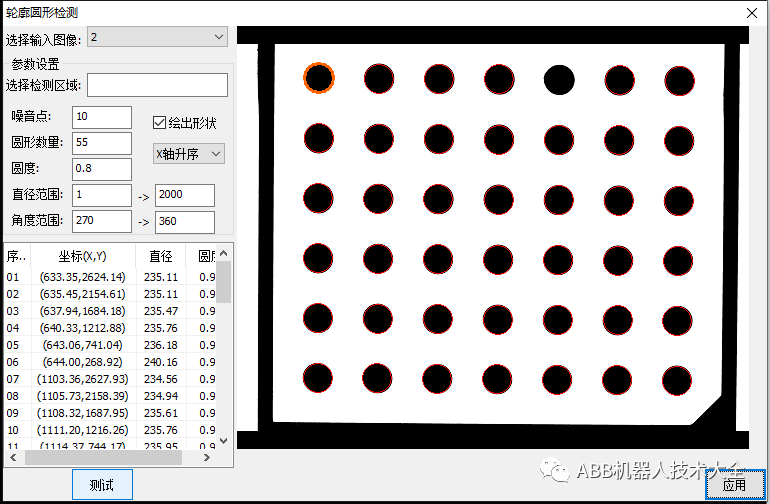
如上圖表格顯示數(shù)據(jù)所示,圖中42個(gè)圓的直徑、圓度、像素坐標(biāo)都已識(shí)別得出結(jié)果。我們選其中九個(gè)點(diǎn)X,Y的像素坐標(biāo)值做為標(biāo)定點(diǎn),并規(guī)定好與實(shí)際應(yīng)用的X,Y方向。這里演示規(guī)定,以圖像的左下角為原點(diǎn)(0,0),那么規(guī)定向上為硬件實(shí)際的X方向,圖片的右邊規(guī)定為硬件實(shí)際的Y方向。
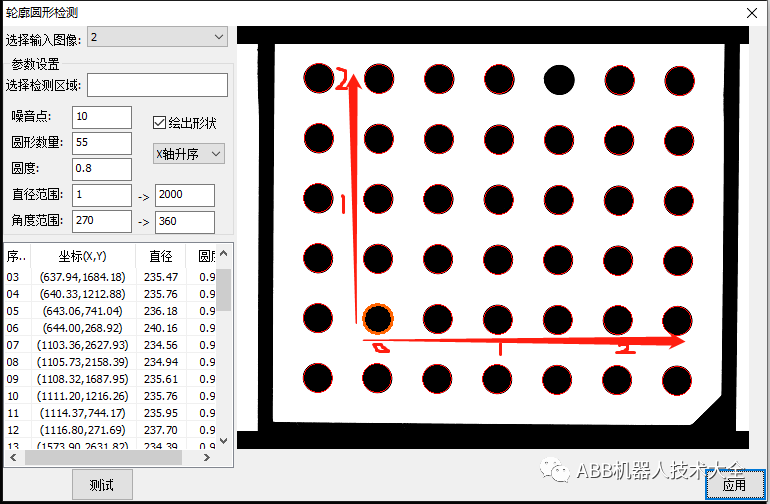
如上圖建立坐標(biāo)系,對(duì)應(yīng)好九個(gè)點(diǎn)的像素坐標(biāo)跟實(shí)際坐標(biāo),如下表格所示。
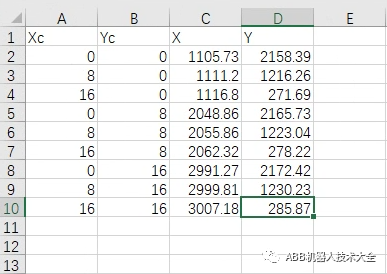
選擇某款視覺(jué)軟件,進(jìn)行手動(dòng)標(biāo)定,這里沒(méi)有太多要求,只做介紹,其它品牌軟件標(biāo)定方法或原理類似。把上面列好值輸入到軟件中,得到6個(gè)標(biāo)定數(shù)據(jù)。
如有機(jī)器人需要建立好實(shí)際的坐標(biāo)系,跟相機(jī)進(jìn)行關(guān)聯(lián)。取標(biāo)定好的數(shù)據(jù),進(jìn)行圖像數(shù)據(jù)轉(zhuǎn)化,實(shí)現(xiàn)位置糾偏等功能。
 End
End
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺(jué)、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺(jué)SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~