【論文推薦】《目標(biāo)檢測》必看的8篇論文【附pdf】
目標(biāo)檢測是計(jì)算機(jī)視覺里面十分重要的任務(wù)。
作為計(jì)算機(jī)視覺中眾多基礎(chǔ)問題中的一個(gè),目標(biāo)檢測成為了許多其他計(jì)算機(jī)視覺任務(wù)的基礎(chǔ),比如:實(shí)例分割,目標(biāo)跟蹤和姿態(tài)估計(jì)等。
深度學(xué)習(xí)的飛速發(fā)展使得目標(biāo)檢測重獲新生,以至于其獲得了重大突破,并使其成為了研究的熱點(diǎn)。目標(biāo)檢測如今已經(jīng)廣泛的應(yīng)用于現(xiàn)實(shí)生活中的各種應(yīng)用之中:無人駕駛、機(jī)器人視覺、視頻監(jiān)控等。
本文就為大家推薦其中8篇最新的目標(biāo)檢測論文。
[2] 自動(dòng)駕駛中用于單目 3D 目標(biāo)檢測的偽立體
Pseudo-Stereo for Monocular 3D Object Detection in Autonomous Driving
[3] 在全景分割的指導(dǎo)下,用于基于 LiDAR 的 3D 對(duì)象檢測的多功能多視圖框架
A Versatile Multi-View Framework for LiDAR-based 3D Object Detection with Guidance from Panoptic Segmentation
[4] 帶有形狀引導(dǎo)標(biāo)簽增強(qiáng)的弱監(jiān)督 3D 對(duì)象檢測
Back to Reality: Weakly-supervised 3D Object Detection with Shape-guided Label Enhancement
[5] 用于 LiDAR 3D 對(duì)象檢測的點(diǎn)密度感知體素
Point Density-Aware Voxels for LiDAR 3D Object Detection
[6] 用于多模態(tài) 3D 目標(biāo)檢測的激光雷達(dá)相機(jī)深度融合
DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection
[7] 視頻偽裝對(duì)象檢測的隱式運(yùn)動(dòng)處理
Implicit Motion Handling for Video Camouflaged Object Detection
[8] 共同顯著性目標(biāo)檢測的綜合特征挖掘
Democracy Does Matter: Comprehensive Feature Mining for Co-Salient Object Detection
那么這些目標(biāo)檢測的論文怎樣才能又好又快地吃透呢?
無非三個(gè)步驟:泛讀、精讀、代碼復(fù)現(xiàn)。
這次我們請(qǐng)來了BAT算法工程師——張老師,推出【目標(biāo)檢測】YOLO V5論文精講直播,為期2天,對(duì)論文和實(shí)驗(yàn)結(jié)果進(jìn)行手把手分析,還有直播現(xiàn)場互動(dòng)答疑,徹底夯實(shí)目標(biāo)檢測基礎(chǔ)。
直播嘉賓:
標(biāo)題_橫版海報(bào)_2022-06-16+11_28_30.png")
—— 直播內(nèi)容與安排 ——
1、6月23日20:30直播
1.為什么要學(xué)習(xí)目標(biāo)檢測論文
2.目標(biāo)檢測發(fā)展歷程與前進(jìn)方向
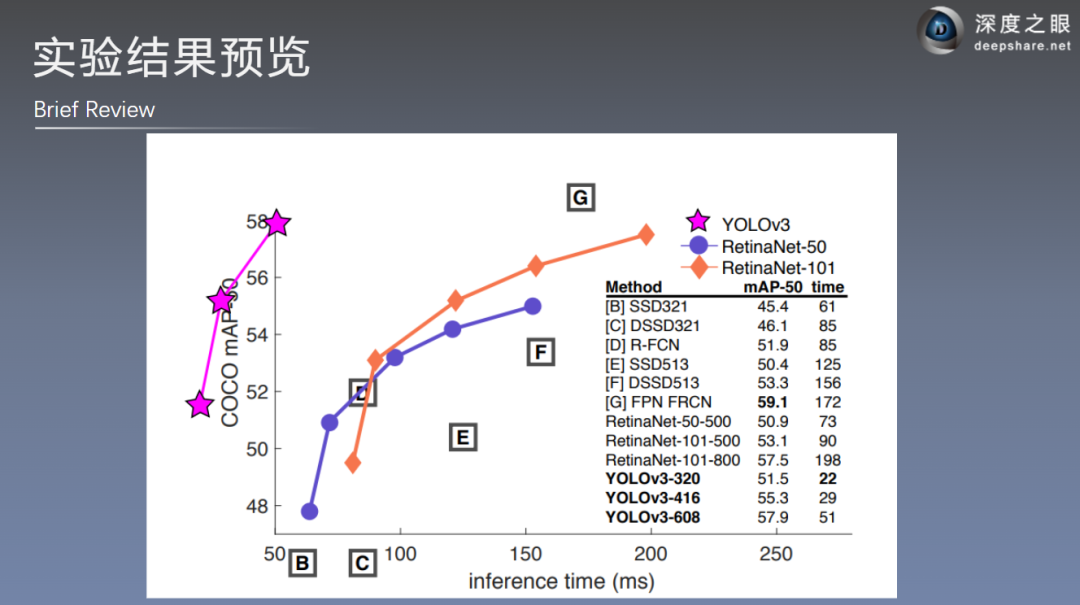
3.YOLO V3回顧和YOLO V3理論知識(shí)詳解
4.注意事項(xiàng)
2、6月24日20:30直播
1.YOLO V5論文精讀
2.YOLO V5細(xì)節(jié)講解
3.實(shí)驗(yàn)結(jié)果分析
4.論文總結(jié)