來源:https://blog.csdn.net/weixin_38349833/article/details/114583263
作者:Jasper_Peng
UWB定位系統(tǒng)
隨著智能制造工業(yè)4.0的到來,傳統(tǒng)工廠也在向智能化和信息化邁進(jìn)。對于人物以及資產(chǎn)的管理也逐步走向智能化。但由于衛(wèi)星信號在室內(nèi)會被嚴(yán)重影響,GPS、北斗等定位系統(tǒng)無法在室內(nèi)使用,因此在室內(nèi)需要采用其他定位技術(shù)。本文的UWB定位技術(shù)屬于現(xiàn)今前沿的室內(nèi)定位技術(shù),UWB通過搭建基站來構(gòu)成一套室內(nèi)位置定位系統(tǒng),該技術(shù)可監(jiān)控人員、物體等在室內(nèi)的實(shí)時位置。
一、什么是UWB定位系統(tǒng)
UWB(Ultra Wideband),超寬帶技術(shù),它源于20世紀(jì)60年代興起的脈沖通信技術(shù)。
UWB不同于傳統(tǒng)的通信技術(shù),需要使用傳統(tǒng)通信體系中的載波,而是通過發(fā)送和接收具有納秒或微妙級以下的極窄脈沖來實(shí)現(xiàn)無線傳輸?shù)摹S捎诿}沖時間寬度極短,因此可以實(shí)現(xiàn)頻譜上的超寬帶,使用的帶寬在50MHz以上。并且它不選用正弦載波,因而其所占的頻譜區(qū)域很大,盡管使用無線通信,但其數(shù)據(jù)傳輸速率能夠達(dá)到幾百兆比特每秒以上。
UWB與傳統(tǒng)通信技術(shù)相比的優(yōu)勢
UWB精準(zhǔn)定位的關(guān)鍵優(yōu)點(diǎn)有,低功耗、對信道衰落(如多徑、非視距等信道)不敏感、抗干擾能力強(qiáng)、不會對同一環(huán)境下的別的設(shè)備造成干擾、穿透性較強(qiáng)(能在穿透一堵磚墻的環(huán)境進(jìn)行精準(zhǔn)定位),具有很高的精準(zhǔn)定位準(zhǔn)確度和精確度。
二、UWB的測距原理
TWR測距算法結(jié)合三邊定位算法進(jìn)行定位,所以大體上實(shí)現(xiàn)定位需要兩個步驟:1、標(biāo)簽與基站進(jìn)行測距得到距離值;2、利用這些距離值進(jìn)行標(biāo)簽坐標(biāo)的解算。下面講解TWR測距有關(guān)的內(nèi)容。
DS-TWR的測距原理如下:
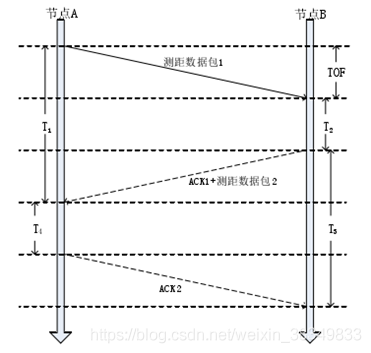
由原理圖,我們可以得到:
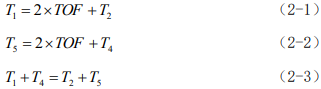
將式子2-1和2-2左右兩邊相乘并移項整理可得:

聯(lián)立2-3和2-4可得到信號飛行時間TOF:

將TOF這個飛行時間和電磁波傳輸速率相乘即為節(jié)點(diǎn)A、B之間的距離。
下面分析一下這種測距方式的誤差,假設(shè)節(jié)點(diǎn)A的鐘差為l_A,節(jié)點(diǎn)B的鐘差為l_B,
且l_A=l_B實(shí)際的T1、T2、T4、T5分別表示為Tt1、Tt2、Tt4、Tt5 ,實(shí)際的TOF為Tf,則有:
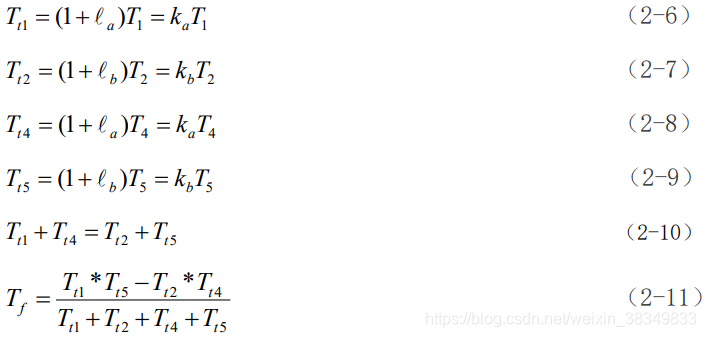
將2-6、2-7、2-8、2-9、2-10代入2-11可得:

所以實(shí)際會造成的信號飛行時間誤差為:

此時誤差來源為TOF以及節(jié)點(diǎn)A/B的鐘差,假設(shè)設(shè)備A和設(shè)備B的時鐘精度是20ppm(很差),1ppm為百萬分之一,那么Ka和Kb分別是0.99998或者1.00002。節(jié)點(diǎn)A、B相距100m,電磁波的飛行時間是333ns。則因為時鐘引入的誤差為2033310-9秒,導(dǎo)致測距誤差為2.2mm,可以忽略不計了。因此雙邊測距是最常采用的測距方式。

三、UWB的定位原理
了解了UWB的測距原理之后,對于UWB的定位原理就更好理解了。UWB室內(nèi)定位是通過在室內(nèi)布置四個(或很多,具體看區(qū)域大小)已知坐標(biāo)的基站,讓需要定位的人員或物體攜帶上定位標(biāo)簽,標(biāo)簽根據(jù)設(shè)定按照一定的頻率發(fā)送脈沖,不斷和已知坐標(biāo)的基站進(jìn)行測距,再通過算法得出標(biāo)簽的位置,精度可達(dá)到厘米級。想了解更多可咨詢:020-82011771
四、基站的布置規(guī)則
1、零維定位,主要應(yīng)用于空間較小,僅作測距和人員或物品出入的判斷。
2、一維定位,主要應(yīng)用于長寬不協(xié)調(diào)的空間內(nèi),典型的有走廊,隧道和有些工廠也會存在一維場景,在一維場景定位下,被定位的目標(biāo)會被拉到一條直線上。
3、二維定位,主要應(yīng)用于長寬比例較協(xié)調(diào)的區(qū)域內(nèi),例如辦公室、工廠、醫(yī)院等,在二維定位下,上位機(jī)會顯示被定位的目標(biāo)的xy坐標(biāo)。注意:定位基站的安裝高度需要一致且無阻擋物,否則可能影響到標(biāo)簽定位的坐標(biāo)精度。
根據(jù)具體應(yīng)用場景的不同,可以實(shí)現(xiàn)零維、一維、二維融合定位。
五、系統(tǒng)組成、參數(shù)及應(yīng)用
1、系統(tǒng)組成
主要包含三方面:UWB定位標(biāo)簽,發(fā)射UWB信號給基站進(jìn)行交互通訊;UWB定位基站,布置時位置坐標(biāo)固定,與標(biāo)簽通訊,將測距數(shù)據(jù)回傳解算引擎;上位機(jī),含解算引擎及軟件界面,進(jìn)行系統(tǒng)配置,解算標(biāo)簽坐標(biāo),將定位結(jié)果進(jìn)行界面顯示。
2、系統(tǒng)參數(shù)
?系統(tǒng)定位精度在15cm左右
?標(biāo)簽刷新率為0.05Hz~20Hz可調(diào),可根據(jù)具體要求調(diào)整
?標(biāo)簽內(nèi)置有蜂鳴器,如遇危險情況可長按進(jìn)入SOS報警模式
3、應(yīng)用場景
?工廠:實(shí)時追蹤作業(yè)人員以及貨物的情況,提高工作效率
?醫(yī)療保健:實(shí)時觀測到病人的位置信息,有利于時刻掌握病人的具體情況
?重點(diǎn)安保區(qū)域:實(shí)時觀測人員的動態(tài),設(shè)置電子圍欄,對現(xiàn)場環(huán)境進(jìn)行優(yōu)化管理,做到安全可靠
六、實(shí)際應(yīng)用
在了解了有關(guān)UWB定位的知識之后,為了檢驗其效果實(shí)用性以及了解更多的信息,我上網(wǎng)采購了一套設(shè)備。
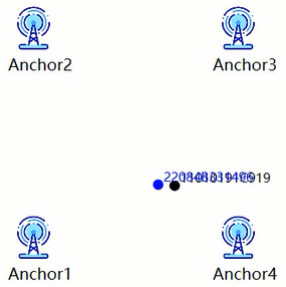
下圖就是我購買的室內(nèi)基站的測試結(jié)果
在6*6m無干擾區(qū)域的二維定位測試及數(shù)據(jù)分析,出來的效果還不錯,有興趣或有需求的朋友可以了解一下。