
相機成像原理四問
和你一起終身學習,這里是程序員Android
經(jīng)典好文推薦,通過閱讀本文,您將收獲以下知識點:
一、相機是如何成像的?
二、 對焦和變焦有什么區(qū)別?
三、 景深是什么?又和什么有關?
四、鏡頭對圖像質(zhì)量的影響
一、相機是如何成像的?
我們可以把相機的成像簡單的抽象成下圖:

image.png
凸透鏡成像
由凸透鏡成像原理,我們可以知道當物距大于2倍焦距時,則像距在1倍焦距和2倍焦距之間,成倒立、縮小的實像。此時像距小于物距,像比物小,物像異側(cè)。設 f=OB 表示透鏡的焦距,m=OC 為像距,n=AO 為物距,有:

image.png
一般地,由于物距遠大于焦距,即 n>>f,所以 m≈f,此時可以用小孔模型代替透鏡成像。
用數(shù)學方式表示成像模型:https://zhuanlan.zhihu.com/p/23090593
二、 對焦和變焦有什么區(qū)別?
對焦
對焦(聚焦)就是把鏡片移動到適合的位置,其要實現(xiàn)清晰成像,則物體應當在兩倍焦距之外,像平面在一倍至兩倍焦距之間,這樣就可以成倒立縮小的圖像,這是照相機的原理。簡單的來說,就是把成的像準確的落在sensor(camera傳感器)上。對焦有兩種:自動對焦,手動對焦。
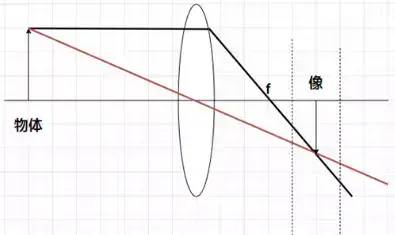
image.png
虛線是sensor的位置,當虛線落在像的位置上就是對焦完成。

image.png
左圖對焦清楚,而右圖沒有對焦清楚,sensor在像的左邊或者右邊都會導致右邊的效果。
變焦
變焦有光學變焦和數(shù)字變焦。
光學變焦:就是改變透鏡的焦距。由于改變了焦距,根據(jù)上面的結論,焦距改變了,視場角也就變了,就可以實現(xiàn)拉近拉遠的功能。
數(shù)碼變焦:是通過數(shù)碼相機的處理器,把圖片內(nèi)的每個像素面積增大,從而達到放大的目的,當前變焦過的時圖像就會出現(xiàn)失真,因為放大的過程會對圖像進程插值。
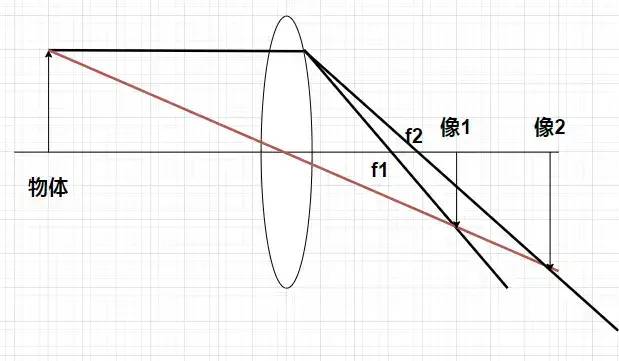
image.png
當焦距越大,成的像也就越大,像距也就越遠。
反之,焦距越小,成的像也就越小,像距越小。
同一個物體,成的像越小,sensor的面積一樣的情況下,可以看到的東西就越多,視野也就越大,因此焦距越小,視場角也就越大。
焦距 像 視場角(視野)
長 大 小
短 小 大
下圖是將焦距拉長后,圖像放大的效果
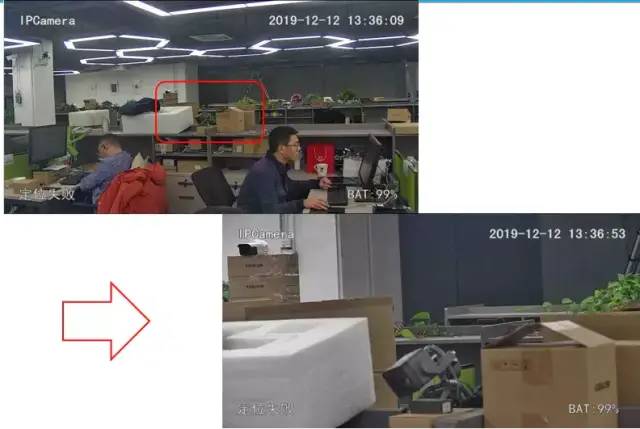
image.png
長焦的放大效果
三、 景深是什么?又和什么有關?
相機景深:其指的是在某個物距之間,還能夠清晰成像的距離,如下圖:

image.png
如果sensor剛好在像距的位置上,物體的一個點,成的像也就是一個點。如果sensor在像距的前面或者后面,這個點也就成了一個圓,專業(yè)術語叫彌散圓。當這個圓大到一定的程度的時候,照片也就糊了。
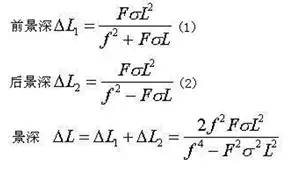
image.png
景深三要素
光圈
光圈就是用來控制光線透過鏡頭的一個裝置,光圈越大,進光量越多。
光圈值,是鏡頭的焦距/鏡頭通光直徑得出的相對值(相對孔徑的倒數(shù)),光圈值越小,光圈越大。相同光圈值,sensor表面的照度相同。
光圈越大,景深越小。
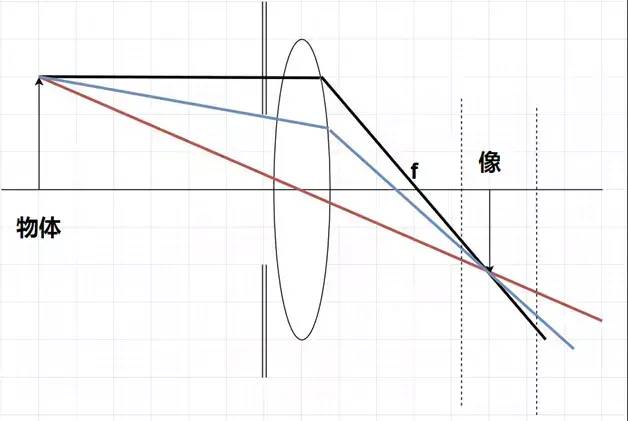
image.png
如圖,當光圈減小,虛線位置的彌散圈也在減小。彌散圈越小,成的像就越清晰。原來看不清楚的物體,彌散圈變小了,就能看清了,景深就變大了。
夜間攝影的時候,增大光圈可以提高進光量,提升圖像質(zhì)量,但是大光圈也會導致景深太小,這個時候就需要兩者權衡。拍人像的時候,我們又會要求景深小,這樣就有背景虛化的效果,這個時候就需要大光圈。
物距
物體越近,景深越小

image.png
物體123是等距的,他們成的像分別是像123,但是像的位置不是等距的。由于sensor聚焦好之后只能在一個位置上,在這個位置上能看到更多的物體,就是景深大。物體1比較遠,我們將sensor聚焦在像1上,像2距離像1很近,彌散圈很小,很容易看清楚物體2。相反的,物體3比較近,我們將sensor聚焦在像3上,像2離像3比較遠,彌散圈大,不容易看清楚物體2。所以從圖中可以很容易的看出,物體越近,景深越小。
焦距
焦距越長,景深越小。

image.png
兩個物體1和2,焦距fa < fb。當焦距為fa,成的像分別是1a和2a,當焦距為fb時,成的像分別為1b和2b。當焦距比較小,為fa的時候,可以很明顯的看到像1a和像1b距離很近,由于sensor只能固定在一個位置,更容易同時看清兩個物體。因此焦距越短,景深越大。
小結
景深 大 小
光圈 小 大
物距 遠 近
焦距 短 長
四、鏡頭對圖像質(zhì)量的影響
1.暗角
原因
對著亮度均勻景物,圖像畫面四角有變暗的現(xiàn)象,叫做“失光”或“暗角”。暗角對于任何鏡頭都不可避免,這是由于鏡頭對于光學折射不均勻。
chrom/color shading 原因
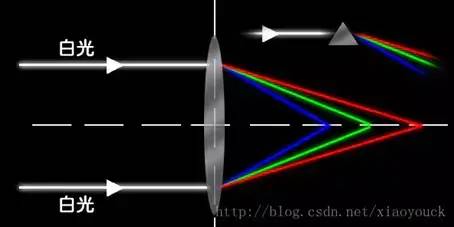
image.png
現(xiàn)象
a. luma shading
由于Lens的光學特性,Sensor影像區(qū)的邊緣區(qū)域接收的光強比中心小,所造成的中心和四角亮度不一致的現(xiàn)象。
b. chrom/color shading:
由于各種顏色的波長不同,經(jīng)過了透鏡的折射,折射的角度也不一樣,因此會造成color shading的現(xiàn)象
暗角現(xiàn)象

image.png
解決方法
sensor和鏡頭的 CRA需要匹配
鏡頭陰影校正(Lens Shading Correction)
lens shading的校正是分別對于bayer的四個通道進行校正,每個通道的校正過程是相對獨立的過程。
暗角矯正
2.炫光
原因
入射光線進入攝像頭模組后多次反射造成的
有興趣的可以看一下:https://wenku.baidu.com/view/8e119588fab069dc502201f4.html?from=search
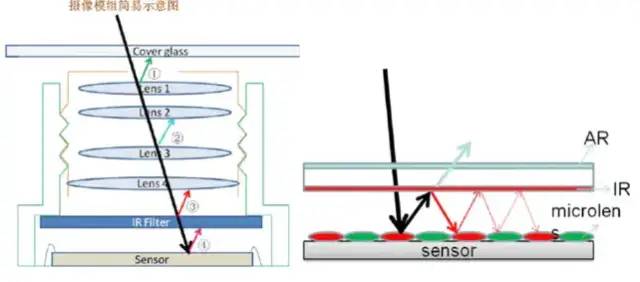
image.png
炫光現(xiàn)象
眩光現(xiàn)象
解決方法
1.加鏡頭罩
2.鍍AR增透膜,減少反射
3.使用藍玻璃IR濾光片,減少IR-cut的反射
使用藍玻璃IR-CUT示意圖

image.png
3. 畸變
原因
鏡頭畸變是由遠離光圈的鏡片的球面像差造成的。
現(xiàn)象
畸變現(xiàn)象

image.png
理想的針孔成像模型確定的坐標變換關系均為線性的,而實際上,現(xiàn)實中使用的相機由于鏡頭中鏡片因為光線的通過產(chǎn)生的不規(guī)則的折射,鏡頭畸變(lens distortion)總是存在的,即根據(jù)理想針孔成像模型計算出來的像點坐標與實際坐標存在偏差。畸變導致的成像失真可分為徑向失真和切向失真兩類。
解決方法
這里只介紹算法上的畸變校正,通過標定,建立一個實際位置和理想位置的映射關系,具體的可以看另一篇文章《鏡頭畸變那些事兒》
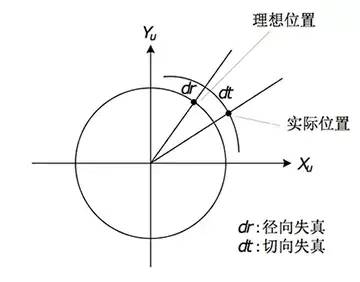
image.png
4. 清晰度不均勻
現(xiàn)象
用同一個鏡頭,中心和邊緣的畫面清晰度也會有區(qū)別,邊緣的清晰度一般都不如中心區(qū)域。
一款鏡頭的MTF曲線
鏡頭的清晰度說明書
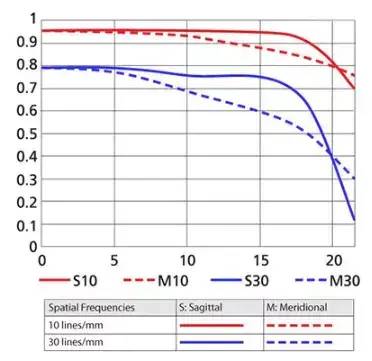
image.png

image.png
解決方法
高通660平臺會根據(jù)離中心的距離,對同一幅畫面中的不同區(qū)域去設置不同的降噪和銳化參數(shù)
5. 色像差
原因
光學玻璃的折射率隨通過的光波的波長變化而變,它對短波長的光的折射率比長波長的折射率更大。這種起因于不同波長的像差,我們稱它為色像差(Chromatic?aberration)。
色像差的原因
現(xiàn)象

image.png
色像差的現(xiàn)象
具體體現(xiàn)在圖像上,就是物體邊緣原本是單純白色,因為色差而變成RGB三原色不能重疊在同一線。最為常見的就是紫邊(Purple Fringe)
解決方法:
Color Aliasing Correction(CAC)檢測圖像中視覺偽像,對偽像顏色進行補償
原文鏈接: https://www.qinxing.xyz/posts/b31d381e/
友情推薦:
至此,本篇已結束。轉(zhuǎn)載網(wǎng)絡的文章,小編覺得很優(yōu)秀,歡迎點擊閱讀原文,支持原創(chuàng)作者,如有侵權,懇請聯(lián)系小編刪除,歡迎您的建議與指正。同時期待您的關注,感謝您的閱讀,謝謝!
點擊閱讀原文,為大佬點贊!