它來了,它來了.ORB_SLAM3走來了
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時間送達(dá)
在2015年,Juan D. Tardos等人發(fā)布了ORB_SLAM2.
2020年暑假,全新 ORB_SLAM3上線啦!!

哎,學(xué)不過來了!
論文地址
https://arxiv.org/abs/2007.11898
代碼地址
https://github.com/UZ-SLAMLab/ORB_SLAM3
目前代碼還不能在GitHub上搜到,畢竟論文剛剛發(fā)表,過幾天應(yīng)該就能搜到了.
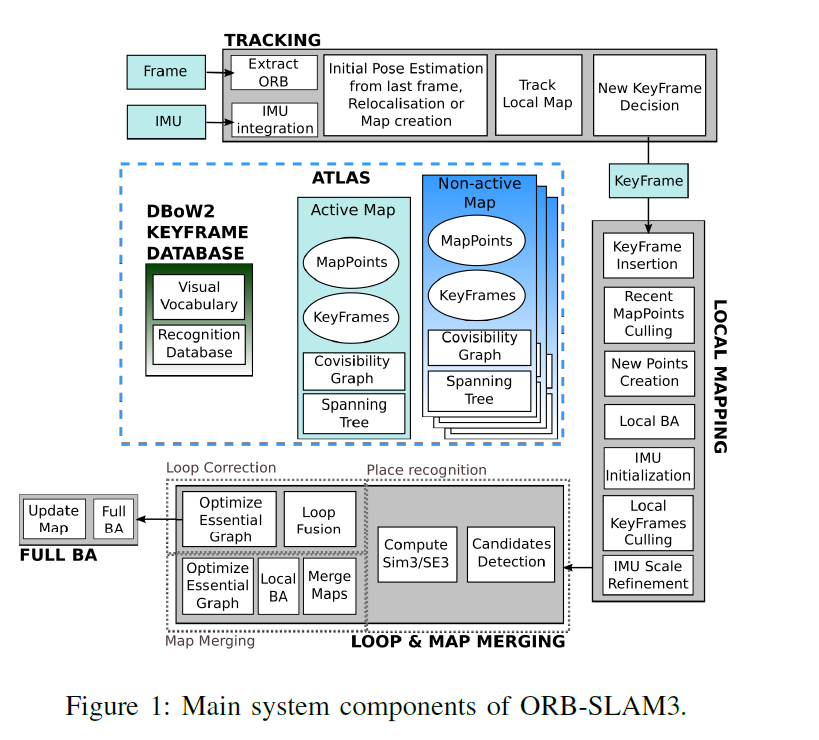
系統(tǒng)組成
數(shù)據(jù)集測試
官方給了六個視頻,這里分享一下
概要
本文介紹了ORB-SLAM3,這是第一個能夠用單目、立體和RGB-D相機(jī),使用針孔和魚眼鏡頭模型進(jìn)行視覺、視覺慣性和多地圖SLAM的系統(tǒng).
第一個主要的創(chuàng)新是一個基于特征的緊密集成視覺慣性SLAM系統(tǒng),它完全依賴于最大后驗(yàn)概率MAP估計,甚至在IMU初始化階段也是如此.其在小型和大型,室內(nèi)和室外環(huán)境中都能穩(wěn)定地運(yùn)行,并且比以前的方法精確2到5倍.
第二個主要的創(chuàng)新是一個多地圖系統(tǒng)(multi-map),它依賴于一種新的位置識別方法和改進(jìn)的召回,多虧了它,ORB_SLAM3能夠在長時間的惡劣視覺信息下生存;當(dāng)它丟失時,它會啟動一個新的地圖,當(dāng)重新訪問地圖區(qū)域時,它將與以前的地圖無縫地合并.
與只使用最后幾秒信息的視覺里程計系統(tǒng)相比,ORB_SLAM3是第一個能夠在所有算法階段重用所有先驗(yàn)信息的系統(tǒng).這允許包含BA調(diào)整共視關(guān)鍵幀,這些關(guān)鍵幀提供了高視差觀測,提高了精度.
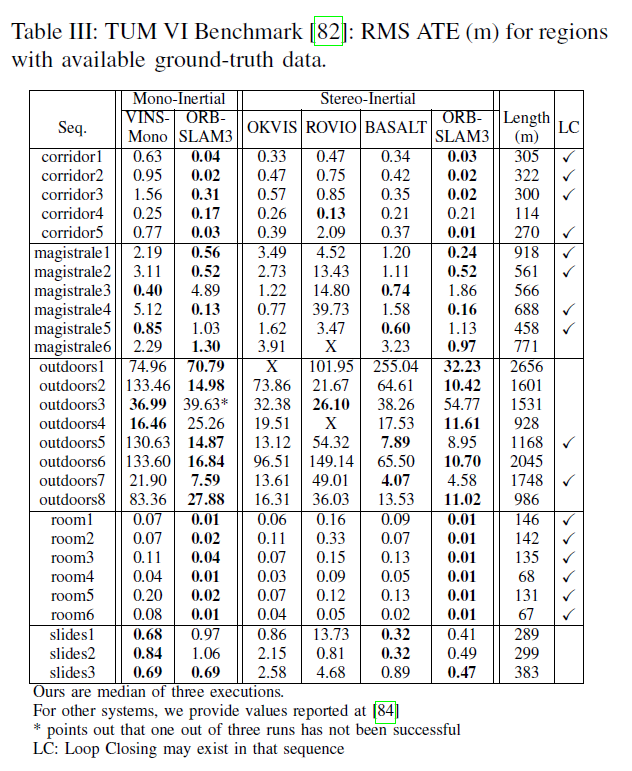
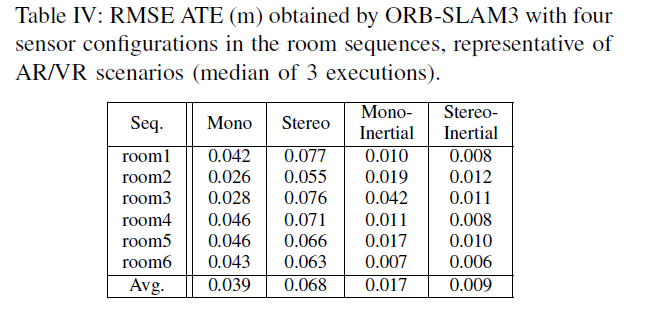
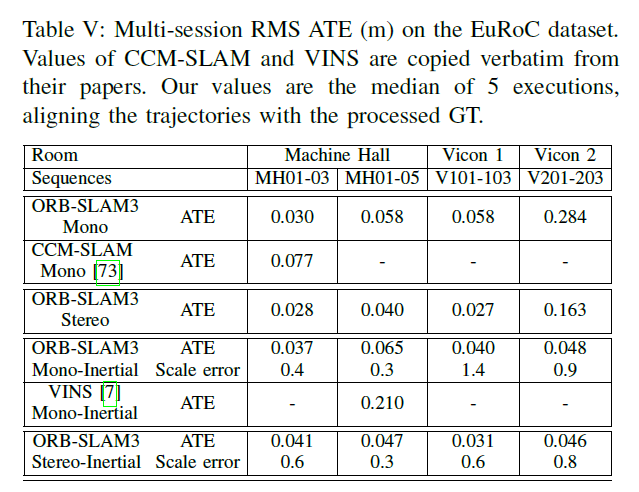
我們的實(shí)驗(yàn)表明,在所有的傳感器配置中,ORB_SLAM3與文獻(xiàn)中可用的最佳系統(tǒng)一樣魯棒,并且更精確.值得注意的是,我們的立體慣性SLAM在EuRoC無人機(jī)上的平均精度為3.6cm,在TUM-VI數(shù)據(jù)集(AR/VR場景的一個典型設(shè)置)中,快速手持移動時的平均精度為9mm,最后,我們開源了代碼.
實(shí)驗(yàn)結(jié)果
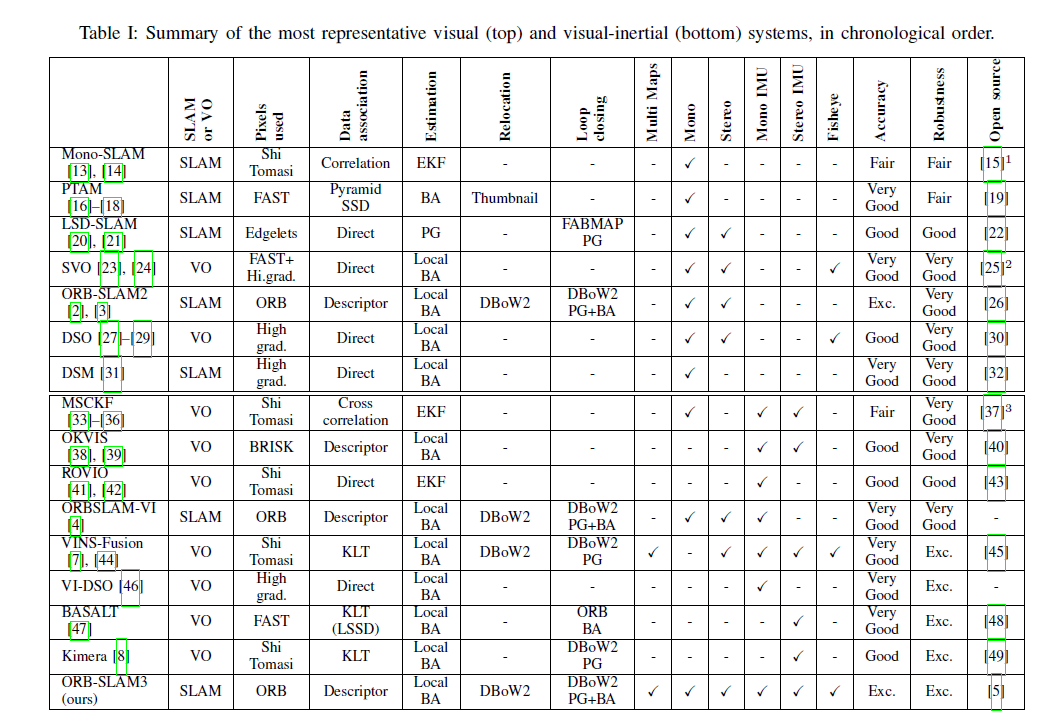
按時間順序總結(jié)的最具代表性的視覺和視覺慣性系統(tǒng)
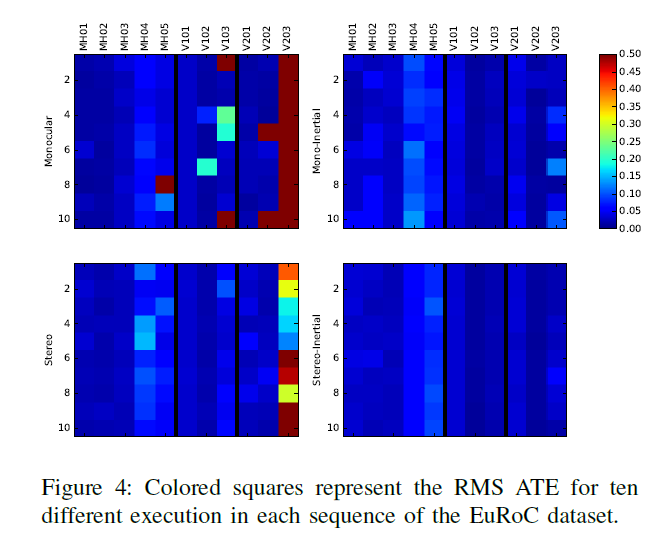
下圖為EuRoC數(shù)據(jù)集的性能比較:
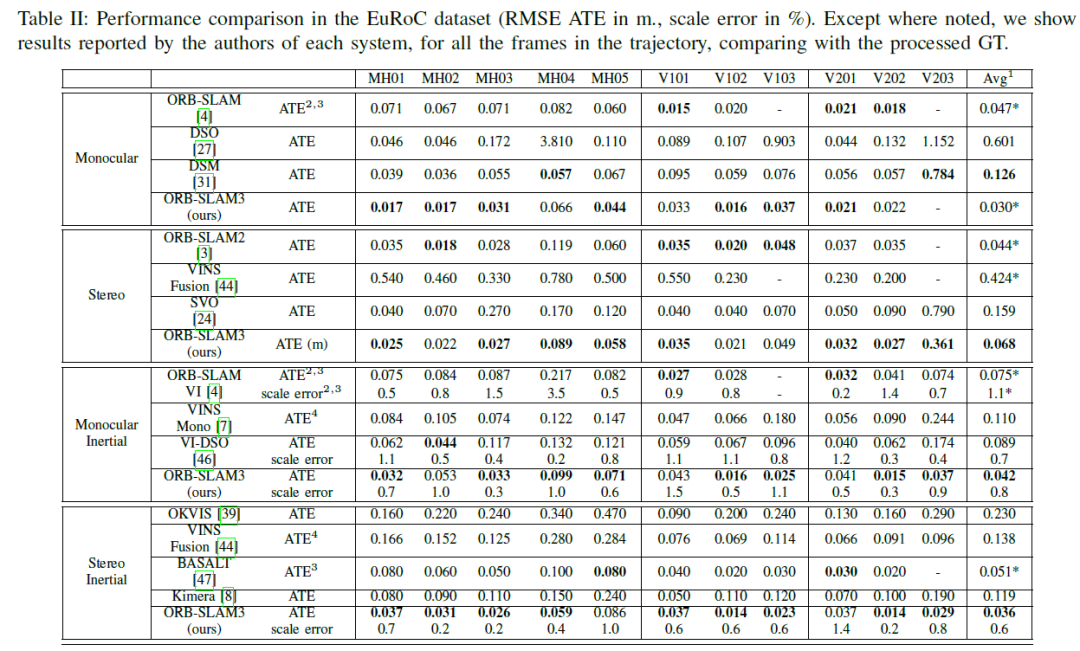
除特別說明外,我們展示了每個系統(tǒng)的作者報告的結(jié)果,對軌跡中的所有幀與處理后的GT進(jìn)行比較.
其他結(jié)果