
在 Python 中從頭開始迭代本地搜索

迭代局部搜索是一種隨機全局優(yōu)化算法。它涉及將本地搜索算法重復應用于先前找到的好的解決方案的修改版本。這樣,它就像是具有隨機重啟算法的隨機爬山的巧妙版本。
該算法背后的直覺是,隨機重新啟動可以幫助找到問題中的許多局部最優(yōu)值,并且更好的局部最優(yōu)值通常接近于其他局部最優(yōu)值。因此,對現(xiàn)有局部最優(yōu)值的適度擾動可能會為優(yōu)化問題找到更好甚至最好的解決方案。
在本教程中,您將發(fā)現(xiàn)如何從頭開始實現(xiàn)迭代的本地搜索算法。完成本教程后,您將知道:
迭代本地搜索是一種隨機全局搜索優(yōu)化算法,它是具有隨機重啟功能的隨機爬山的更智能版本。
如何從頭開始隨機重啟隨機爬山。
如何實現(xiàn)并將迭代的局部搜索算法應用于非線性目標函數(shù)。
教程概述
本教程分為五個部分。他們是:
什么是迭代本地搜索 客觀目標函數(shù) 隨機爬山算法 隨機重新開始的隨機爬山 迭代局部搜索算法
什么是迭代本地搜索
迭代本地搜索(簡稱ILS)是一種隨機的全局搜索優(yōu)化算法。它與隨機爬山和隨機爬山隨機開始有關。
隨機爬山是一種本地搜索算法,它涉及對現(xiàn)有解決方案進行隨機修改,并且僅當修改產生比當前工作解決方案更好的結果時,才接受修改。
通常,本地搜索算法會陷入本地最優(yōu)狀態(tài)。解決此問題的一種方法是從新的隨機選擇的起點重新開始搜索。重新啟動過程可以執(zhí)行多次,也可以在固定數(shù)量的功能評估之后觸發(fā),或者在給定數(shù)量的算法迭代中看不到進一步的改善時,可以觸發(fā)重新啟動過程。該算法稱為隨機重新啟動的隨機爬山。
迭代的本地搜索類似于具有隨機重啟的隨機爬坡,除了不是為每次重啟選擇隨機的起點,而是根據(jù)迄今為止在更廣泛的搜索中找到的最佳點的修改版本來選擇一個點。到目前為止,最佳解決方案的擾動就像是搜索空間中向新區(qū)域的大幅躍遷,而隨機爬山算法產生的擾動要小得多,僅限于搜索空間的特定區(qū)域。這允許在兩個級別上執(zhí)行搜索。爬山算法是一種本地搜索,用于從特定的候選解決方案或搜索空間區(qū)域中獲取最大收益,并且重新啟動方法允許探索搜索空間的不同區(qū)域。這樣,迭代局部搜索算法可在搜索空間中探索多個局部最優(yōu),從而增加了定位全局最優(yōu)的可能性。盡管可以通過在搜索空間中使用不同的步長將其應用于連續(xù)功能優(yōu)化,但迭代局部搜索是針對組合優(yōu)化問題(如旅行推銷員問題(TSP))提出的:爬坡的步幅較小,爬坡的步幅較大隨機重啟。既然我們熟悉了迭代本地搜索算法,那么讓我們探索如何從頭開始實現(xiàn)該算法。
客觀目標函數(shù)
首先,讓我們定義一個渠道優(yōu)化問題,作為實現(xiàn)“迭代本地搜索”算法的基礎。Ackley函數(shù)是多模式目標函數(shù)的一個示例,該函數(shù)具有單個全局最優(yōu)值和多個局部最優(yōu)值,可能會卡住局部搜索。因此,需要全局優(yōu)化技術。這是一個二維目標函數(shù),其全局最佳值為[0,0],其值為0.0。下面的示例實現(xiàn)了Ackley,并創(chuàng)建了一個三維表面圖,顯示了全局最優(yōu)值和多個局部最優(yōu)值。
# ackley multimodal function
from numpy import arange
from numpy import exp
from numpy import sqrt
from numpy import cos
from numpy import e
from numpy import pi
from numpy import meshgrid
from matplotlib import pyplot
from mpl_toolkits.mplot3d import Axes3D
# objective function
def objective(x, y):
return -20.0 * exp(-0.2 * sqrt(0.5 * (x**2 + y**2))) - exp(0.5 * (cos(2 * pi * x) + cos(2 * pi * y))) + e + 20
# define range for input
r_min, r_max = -5.0, 5.0
# sample input range uniformly at 0.1 increments
xaxis = arange(r_min, r_max, 0.1)
yaxis = arange(r_min, r_max, 0.1)
# create a mesh from the axis
x, y = meshgrid(xaxis, yaxis)
# compute targets
results = objective(x, y)
# create a surface plot with the jet color scheme
figure = pyplot.figure()
axis = figure.gca(projection='3d')
axis.plot_surface(x, y, results, cmap='jet')
# show the plot
pyplot.show()
運行示例將創(chuàng)建Ackley函數(shù)的表面圖,以顯示大量的局部最優(yōu)值。
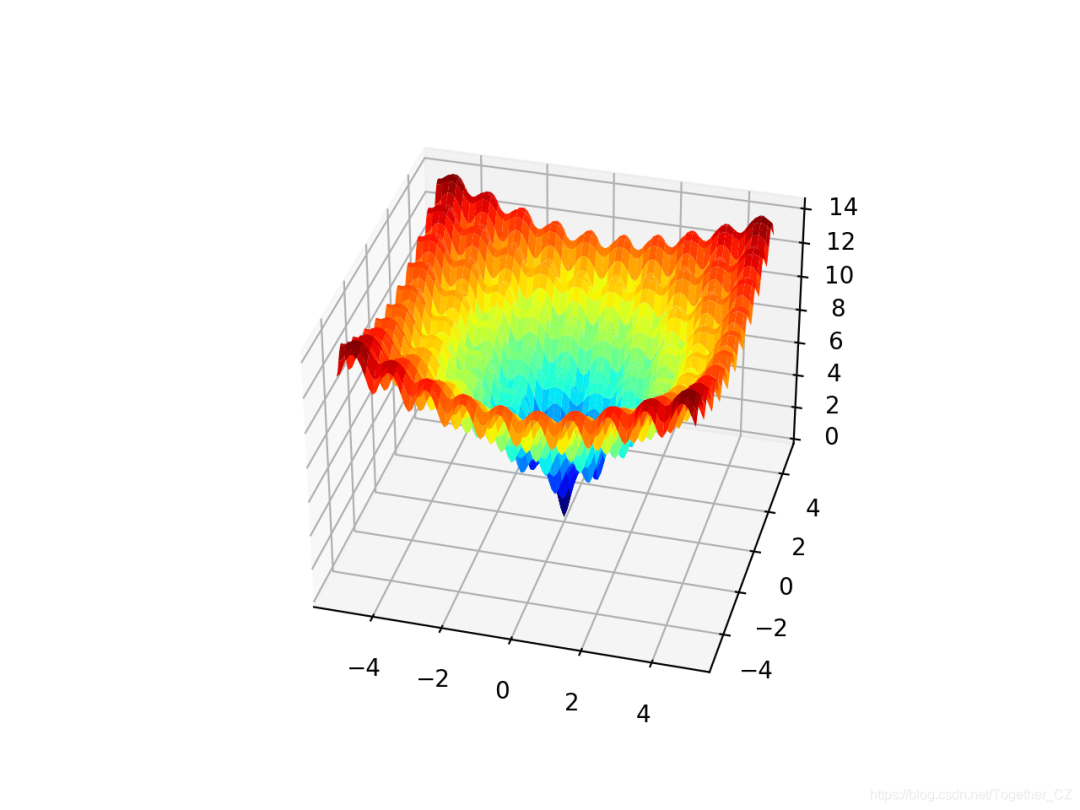
我們將以此為基礎來實現(xiàn)和比較簡單的隨機爬山算法,隨機重啟的隨機爬山算法以及最終迭代的本地搜索。我們希望隨機爬山算法容易陷入局部極小值。我們希望隨機爬山并重新啟動可以找到許多本地最小值,并且如果配置得當,我們希望迭代本地搜索比任何一種方法在此問題上的執(zhí)行效果都更好。
隨機爬山算法
迭代本地搜索算法的核心是本地搜索,在本教程中,我們將為此目的使用隨機爬山算法。隨機爬山算法涉及到首先生成一個隨機的起點和當前的工作解決方案,然后生成當前工作解決方案的擾動版本,如果它們優(yōu)于當前的工作解決方案,則接受它們。假設我們正在研究連續(xù)優(yōu)化問題,則解決方案是目標函數(shù)要評估的值的向量,在這種情況下,該向量是二維空間中以-5和5為邊界的點。我們可以通過以均勻的概率分布對搜索空間進行采樣來生成隨機點。例如:
# generate a random point in the search space
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
我們可以使用高斯概率分布,當前解決方案中當前值的平均值以及由超參數(shù)控制的標準偏差來生成當前正在工作的解決方案的擾動版本,該超參數(shù)控制允許搜索從當前工作解決方案進行多遠的探索。
我們將此超參數(shù)稱為“ step_size”,例如:
# generate a perturbed version of a current working solution
candidate = solution + randn(len(bounds)) * step_size
重要的是,我們必須檢查生成的解決方案是否在搜索空間內。
這可以通過一個名為in_bounds()的自定義函數(shù)來實現(xiàn),該函數(shù)采用候選解和搜索空間的邊界,如果該點位于搜索空間中,則返回True,否則返回False。
# check if a point is within the bounds of the search
def in_bounds(point, bounds):
# enumerate all dimensions of the point
for d in range(len(bounds)):
# check if out of bounds for this dimension
if point[d] < bounds[d, 0] or point[d] > bounds[d, 1]:
return False
return True
然后可以在爬坡期間調用此函數(shù),以確認新點在搜索空間的邊界內,如果沒有,則可以生成新點。
結合在一起,下面的函數(shù)hillclimbing()實現(xiàn)了隨機爬山局部搜索算法。它以目標函數(shù)的名稱,問題的范圍,迭代次數(shù)和步長為參數(shù),并返回最佳解決方案及其評估。
# hill climbing local search algorithm
def hillclimbing(objective, bounds, n_iterations, step_size):
# generate an initial point
solution = None
while solution is None or not in_bounds(solution, bounds):
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# evaluate the initial point
solution_eval = objective(solution)
# run the hill climb
for i in range(n_iterations):
# take a step
candidate = None
while candidate is None or not in_bounds(candidate, bounds):
candidate = solution + randn(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
# report progress
print('>%d f(%s) = %.5f' % (i, solution, solution_eval))
return [solution, solution_eval]
我們可以在Ackley函數(shù)上測試該算法。
我們將為偽隨機數(shù)生成器固定種子,以確保每次運行代碼時都得到相同的結果。
該算法將運行1,000次迭代,步長為0.05個單位。經過一些反復試驗后,才選擇了這兩個超參數(shù)。
運行結束時,我們將報告找到的最佳解決方案。
# seed the pseudorandom number generator
seed(1)
# define range for input
bounds = asarray([[-5.0, 5.0], [-5.0, 5.0]])
# define the total iterations
n_iterations = 1000
# define the maximum step size
step_size = 0.05
# perform the hill climbing search
best, score = hillclimbing(objective, bounds, n_iterations, step_size)
print('Done!')
print('f(%s) = %f' % (best, score))
結合在一起,下面列出了將隨機爬山算法應用于Ackley目標函數(shù)的完整示例。
# hill climbing search of the ackley objective function
from numpy import asarray
from numpy import exp
from numpy import sqrt
from numpy import cos
from numpy import e
from numpy import pi
from numpy.random import randn
from numpy.random import rand
from numpy.random import seed
# objective function
def objective(v):
x, y = v
return -20.0 * exp(-0.2 * sqrt(0.5 * (x**2 + y**2))) - exp(0.5 * (cos(2 * pi * x) + cos(2 * pi * y))) + e + 20
# check if a point is within the bounds of the search
def in_bounds(point, bounds):
# enumerate all dimensions of the point
for d in range(len(bounds)):
# check if out of bounds for this dimension
if point[d] < bounds[d, 0] or point[d] > bounds[d, 1]:
return False
return True
# hill climbing local search algorithm
def hillclimbing(objective, bounds, n_iterations, step_size):
# generate an initial point
solution = None
while solution is None or not in_bounds(solution, bounds):
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# evaluate the initial point
solution_eval = objective(solution)
# run the hill climb
for i in range(n_iterations):
# take a step
candidate = None
while candidate is None or not in_bounds(candidate, bounds):
candidate = solution + randn(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
# report progress
print('>%d f(%s) = %.5f' % (i, solution, solution_eval))
return [solution, solution_eval]
# seed the pseudorandom number generator
seed(1)
# define range for input
bounds = asarray([[-5.0, 5.0], [-5.0, 5.0]])
# define the total iterations
n_iterations = 1000
# define the maximum step size
step_size = 0.05
# perform the hill climbing search
best, score = hillclimbing(objective, bounds, n_iterations, step_size)
print('Done!')
print('f(%s) = %f' % (best, score))
運行示例將對目標函數(shù)執(zhí)行隨機爬山搜索。搜索過程中發(fā)現(xiàn)的每個改進都會報告出來,然后在搜索結束時報告最佳解決方案。
注意:由于算法或評估程序的隨機性,或者數(shù)值精度的差異,您的結果可能會有所不同。考慮運行該示例幾次并比較平均結果。
在這種情況下,我們可以看到搜索過程中約有13處改進,最終解決方案約為f(-0.981,1.965),得出的評估值為5.381,與f(0.0,0.0)= 0相去甚遠。
>0 f([-0.85618854 2.1495965 ]) = 6.46986
>1 f([-0.81291816 2.03451957]) = 6.07149
>5 f([-0.82903902 2.01531685]) = 5.93526
>7 f([-0.83766043 1.97142393]) = 5.82047
>9 f([-0.89269139 2.02866012]) = 5.68283
>12 f([-0.8988359 1.98187164]) = 5.55899
>13 f([-0.9122303 2.00838942]) = 5.55566
>14 f([-0.94681334 1.98855174]) = 5.43024
>15 f([-0.98117198 1.94629146]) = 5.39010
>23 f([-0.97516403 1.97715161]) = 5.38735
>39 f([-0.98628044 1.96711371]) = 5.38241
>362 f([-0.9808789 1.96858459]) = 5.38233
>629 f([-0.98102417 1.96555308]) = 5.38194
Done!
f([-0.98102417 1.96555308]) = 5.381939
隨機重新開始的隨機爬山
具有隨機重啟功能的隨機爬山算法涉及重復運行隨機爬山算法并跟蹤找到的最佳解決方案。首先,讓我們修改hillclimbing()函數(shù)以獲取搜索的起點,而不是隨機生成它。這將在以后實現(xiàn)迭代本地搜索算法時有所幫助。
# hill climbing local search algorithm
def hillclimbing(objective, bounds, n_iterations, step_size, start_pt):
# store the initial point
solution = start_pt
# evaluate the initial point
solution_eval = objective(solution)
# run the hill climb
for i in range(n_iterations):
# take a step
candidate = None
while candidate is None or not in_bounds(candidate, bounds):
candidate = solution + randn(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
return [solution, solution_eval]
接下來,我們可以通過重復調用hillclimbing()函數(shù)一定的次數(shù)來實現(xiàn)隨機重啟算法。每次通話時,我們都會為爬山搜索生成一個隨機選擇的新起點。
# generate a random initial point for the search
start_pt = None
while start_pt is None or not in_bounds(start_pt, bounds):
start_pt = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# perform a stochastic hill climbing search
solution, solution_eval = hillclimbing(objective, bounds, n_iter, step_size, start_pt)
然后,我們可以檢查結果并將其保留,以使其比我們到目前為止所看到的任何搜索結果都要好。
# check for new best
if solution_eval < best_eval:
best, best_eval = solution, solution_eval
print('Restart %d, best: f(%s) = %.5f' % (n, best, best_eval))
結合在一起,random_restarts()函數(shù)實現(xiàn)了具有隨機重啟功能的隨機爬山算法。
# hill climbing with random restarts algorithm
def random_restarts(objective, bounds, n_iter, step_size, n_restarts):
best, best_eval = None, 1e+10
# enumerate restarts
for n in range(n_restarts):
# generate a random initial point for the search
start_pt = None
while start_pt is None or not in_bounds(start_pt, bounds):
start_pt = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# perform a stochastic hill climbing search
solution, solution_eval = hillclimbing(objective, bounds, n_iter, step_size, start_pt)
# check for new best
if solution_eval < best_eval:
best, best_eval = solution, solution_eval
print('Restart %d, best: f(%s) = %.5f' % (n, best, best_eval))
return [best, best_eval]
然后,我們可以將此算法應用于Ackley目標函數(shù)。在這種情況下,我們會將隨機重啟的數(shù)量限制為任意選擇的30次。
下面列出了完整的示例。
# hill climbing search with random restarts of the ackley objective function
from numpy import asarray
from numpy import exp
from numpy import sqrt
from numpy import cos
from numpy import e
from numpy import pi
from numpy.random import randn
from numpy.random import rand
from numpy.random import seed
# objective function
def objective(v):
x, y = v
return -20.0 * exp(-0.2 * sqrt(0.5 * (x**2 + y**2))) - exp(0.5 * (cos(2 * pi * x) + cos(2 * pi * y))) + e + 20
# check if a point is within the bounds of the search
def in_bounds(point, bounds):
# enumerate all dimensions of the point
for d in range(len(bounds)):
# check if out of bounds for this dimension
if point[d] < bounds[d, 0] or point[d] > bounds[d, 1]:
return False
return True
# hill climbing local search algorithm
def hillclimbing(objective, bounds, n_iterations, step_size, start_pt):
# store the initial point
solution = start_pt
# evaluate the initial point
solution_eval = objective(solution)
# run the hill climb
for i in range(n_iterations):
# take a step
candidate = None
while candidate is None or not in_bounds(candidate, bounds):
candidate = solution + randn(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
return [solution, solution_eval]
# hill climbing with random restarts algorithm
def random_restarts(objective, bounds, n_iter, step_size, n_restarts):
best, best_eval = None, 1e+10
# enumerate restarts
for n in range(n_restarts):
# generate a random initial point for the search
start_pt = None
while start_pt is None or not in_bounds(start_pt, bounds):
start_pt = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# perform a stochastic hill climbing search
solution, solution_eval = hillclimbing(objective, bounds, n_iter, step_size, start_pt)
# check for new best
if solution_eval < best_eval:
best, best_eval = solution, solution_eval
print('Restart %d, best: f(%s) = %.5f' % (n, best, best_eval))
return [best, best_eval]
# seed the pseudorandom number generator
seed(1)
# define range for input
bounds = asarray([[-5.0, 5.0], [-5.0, 5.0]])
# define the total iterations
n_iter = 1000
# define the maximum step size
step_size = 0.05
# total number of random restarts
n_restarts = 30
# perform the hill climbing search
best, score = random_restarts(objective, bounds, n_iter, step_size, n_restarts)
print('Done!')
print('f(%s) = %f' % (best, score))
運行該示例將執(zhí)行隨機爬山,并隨機重啟以查找Ackley目標函數(shù)。每次發(fā)現(xiàn)改進的整體解決方案時,都會進行報告,并匯總通過搜索找到的最終最佳解決方案。
注意:由于算法或評估程序的隨機性,或者數(shù)值精度的差異,您的結果可能會有所不同。考慮運行該示例幾次并比較平均結果。
在這種情況下,我們可以看到搜索過程中的三處改進,發(fā)現(xiàn)的最佳解決方案約為f(0.002,0.002),其評估值為大約0.009,這比單次爬山算法要好得多。
Restart 0, best: f([-0.98102417 1.96555308]) = 5.38194
Restart 2, best: f([1.96522236 0.98120013]) = 5.38191
Restart 4, best: f([0.00223194 0.00258853]) = 0.00998
Done!
f([0.00223194 0.00258853]) = 0.009978
接下來,讓我們看看如何實現(xiàn)迭代的本地搜索算法。
迭代局部搜索算法
迭代本地搜索算法是具有隨機重啟算法的隨機爬坡的改進版本。重要的區(qū)別在于,隨機爬山算法的每種應用的起點都是到目前為止找到的最佳點的一種擾動版本。我們可以通過使用random_restarts()函數(shù)作為起點來實現(xiàn)此算法。每次重新啟動迭代時,我們可以生成到目前為止找到的最佳解決方案的修改版本,而不是隨機的起點。這可以通過使用步長超參數(shù)來實現(xiàn),就像在隨機爬山者中使用的一樣。在這種情況下,考慮到搜索空間中較大的擾動,將使用較大的步長值。
# generate an initial point as a perturbed version of the last best
start_pt = None
while start_pt is None or not in_bounds(start_pt, bounds):
start_pt = best + randn(len(bounds)) * p_size
結合在一起,下面定義了iterated_local_search()函數(shù)。
# iterated local search algorithm
def iterated_local_search(objective, bounds, n_iter, step_size, n_restarts, p_size):
# define starting point
best = None
while best is None or not in_bounds(best, bounds):
best = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# evaluate current best point
best_eval = objective(best)
# enumerate restarts
for n in range(n_restarts):
# generate an initial point as a perturbed version of the last best
start_pt = None
while start_pt is None or not in_bounds(start_pt, bounds):
start_pt = best + randn(len(bounds)) * p_size
# perform a stochastic hill climbing search
solution, solution_eval = hillclimbing(objective, bounds, n_iter, step_size, start_pt)
# check for new best
if solution_eval < best_eval:
best, best_eval = solution, solution_eval
print('Restart %d, best: f(%s) = %.5f' % (n, best, best_eval))
return [best, best_eval]
然后,我們可以將該算法應用于Ackley目標函數(shù)。在這種情況下,我們將使用較大的步長值1.0進行隨機重啟,這是在經過反復試驗后選擇的。
下面列出了完整的示例。
# iterated local search of the ackley objective function
from numpy import asarray
from numpy import exp
from numpy import sqrt
from numpy import cos
from numpy import e
from numpy import pi
from numpy.random import randn
from numpy.random import rand
from numpy.random import seed
# objective function
def objective(v):
x, y = v
return -20.0 * exp(-0.2 * sqrt(0.5 * (x**2 + y**2))) - exp(0.5 * (cos(2 * pi * x) + cos(2 * pi * y))) + e + 20
# check if a point is within the bounds of the search
def in_bounds(point, bounds):
# enumerate all dimensions of the point
for d in range(len(bounds)):
# check if out of bounds for this dimension
if point[d] < bounds[d, 0] or point[d] > bounds[d, 1]:
return False
return True
# hill climbing local search algorithm
def hillclimbing(objective, bounds, n_iterations, step_size, start_pt):
# store the initial point
solution = start_pt
# evaluate the initial point
solution_eval = objective(solution)
# run the hill climb
for i in range(n_iterations):
# take a step
candidate = None
while candidate is None or not in_bounds(candidate, bounds):
candidate = solution + randn(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
return [solution, solution_eval]
# iterated local search algorithm
def iterated_local_search(objective, bounds, n_iter, step_size, n_restarts, p_size):
# define starting point
best = None
while best is None or not in_bounds(best, bounds):
best = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# evaluate current best point
best_eval = objective(best)
# enumerate restarts
for n in range(n_restarts):
# generate an initial point as a perturbed version of the last best
start_pt = None
while start_pt is None or not in_bounds(start_pt, bounds):
start_pt = best + randn(len(bounds)) * p_size
# perform a stochastic hill climbing search
solution, solution_eval = hillclimbing(objective, bounds, n_iter, step_size, start_pt)
# check for new best
if solution_eval < best_eval:
best, best_eval = solution, solution_eval
print('Restart %d, best: f(%s) = %.5f' % (n, best, best_eval))
return [best, best_eval]
# seed the pseudorandom number generator
seed(1)
# define range for input
bounds = asarray([[-5.0, 5.0], [-5.0, 5.0]])
# define the total iterations
n_iter = 1000
# define the maximum step size
s_size = 0.05
# total number of random restarts
n_restarts = 30
# perturbation step size
p_size = 1.0
# perform the hill climbing search
best, score = iterated_local_search(objective, bounds, n_iter, s_size, n_restarts, p_size)
print('Done!')
print('f(%s) = %f' % (best, score))
運行該示例將對Ackley目標函數(shù)執(zhí)行“迭代本地搜索”。
每次發(fā)現(xiàn)改進的整體解決方案時,都會進行報告,并在運行結束時匯總通過搜索找到的最終最佳解決方案。
注意:由于算法或評估程序的隨機性,或者數(shù)值精度的差異,您的結果可能會有所不同。考慮運行該示例幾次并比較平均結果。
在這種情況下,我們可以在搜索過程中看到四個改進,發(fā)現(xiàn)的最佳解決方案是兩個非常小的輸入,它們接近于零,其估計值為0.0003,這比單次爬山或爬山都要好。登山者重新啟動。
Restart 0, best: f([-0.96775653 0.96853129]) = 3.57447
Restart 3, best: f([-4.50618519e-04 9.51020713e-01]) = 2.57996
Restart 5, best: f([ 0.00137423 -0.00047059]) = 0.00416
Restart 22, best: f([ 1.16431936e-04 -3.31358206e-06]) = 0.00033
Done!
f([ 1.16431936e-04 -3.31358206e-06]) = 0.000330
作者:沂水寒城,CSDN博客專家,個人研究方向:機器學習、深度學習、NLP、CV
Blog: http://yishuihancheng.blog.csdn.net
贊 賞 作 者



點擊下方閱讀原文加入社區(qū)會員