
自動駕駛汽車的傳感器該如何布置?
點擊下方卡片,關(guān)注“新機器視覺”公眾號
重磅干貨,第一時間送達
來源:智車科技?
/?導讀?/
“無人駕駛汽車的研究越來越多,各環(huán)境感知傳感器的分布位置也不同,到底這些傳感器要遵循一個什么樣的布置原則?請看本文介紹。”

傳感器介紹
智能駕駛汽車環(huán)境感知傳感器主要有超聲波雷達、毫米波雷達、激光雷達、單/雙/三目攝像頭、環(huán)視攝像頭以及夜視設(shè)備。目前,處于開發(fā)中的典型智能駕駛車傳感器配置如表 1所示。
表 1 智能駕駛汽車傳感器配置
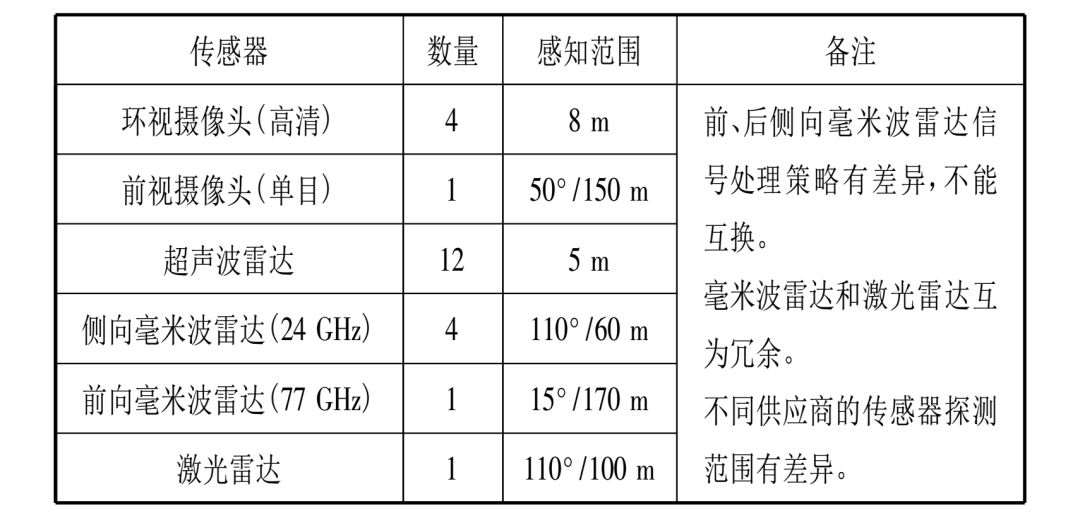
環(huán)視攝像頭:主要應(yīng)用于短距離場景,可識別障礙物,但對光照、天氣等外在條件很敏感,技術(shù)成熟,價格低廉; 攝像頭:常用有單、雙、三目,主要應(yīng)用于中遠距離場景,能識別清晰的車道線、交通標識、障礙物、行人,但對光照、天氣等條件很敏感,而且需要復(fù)雜的算法支持,對處理器的要求也比較高; 超聲波雷達:主要應(yīng)用于短距離場景下,如輔助泊車,結(jié)構(gòu)簡單、體積小、成本低; 毫米波雷達:主要有用于中短測距的 24 GHz 雷達和長測距的 77 GHz 雷達 2 種。毫米波雷達可有效提取景深及速度信息,識別障礙物,有一定的穿透霧、煙和灰塵的能力,但在環(huán)境障礙物復(fù)雜的情況下,由于毫米波依靠聲波定位,聲波出現(xiàn)漫反射,導致漏檢率和誤差率比較高; 激光雷達:分單線和多線激光雷達,多線激光雷達可以獲得極高的速度、距離和角度分辨率,形成精確的 3D 地圖,抗干擾能力強,是智能駕駛汽車發(fā)展的最佳技術(shù)路線,但是成本較高,也容易受到惡劣天氣和煙霧環(huán)境的影響。
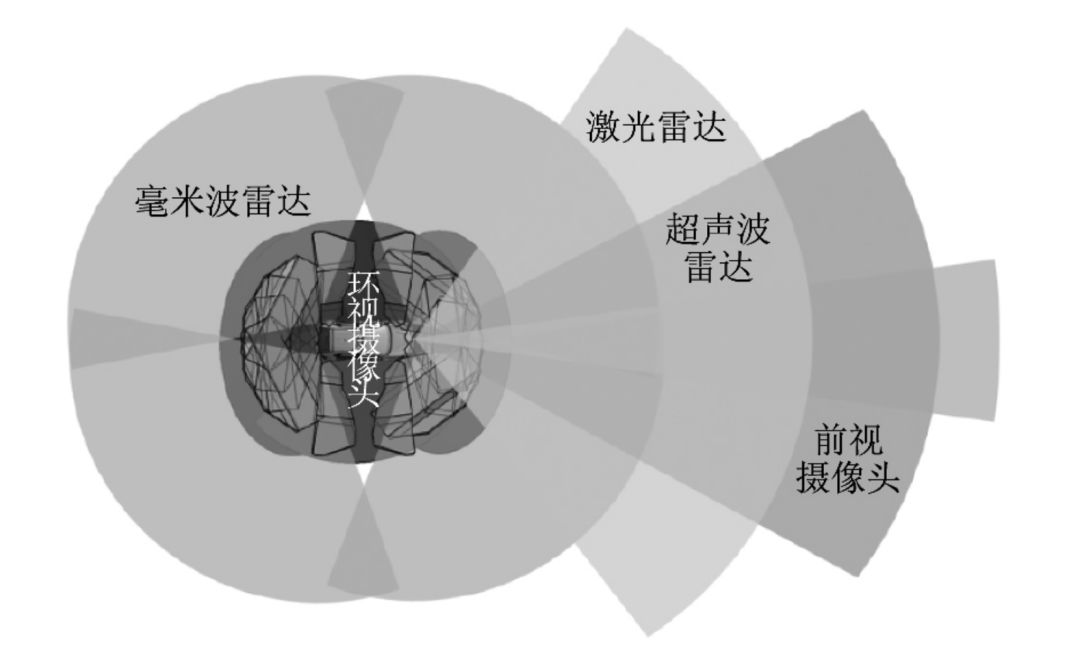

12 個超聲波傳感器,位于前后及側(cè)方,4 個廣角 360 度攝像頭,位于前后和兩側(cè)后視鏡,1 個前向攝像頭,位于內(nèi)后視鏡后方,4 個中距離雷達,位于車輛的四角,1 個長距離雷達,位于前方,1 個紅外夜視攝像頭,位于前方,1 個激光掃描儀 Laser Scanner,位于前方。





本文僅做學術(shù)分享,如有侵權(quán),請聯(lián)系刪文。
評論
圖片
表情