
全面了解攝像頭
點(diǎn)擊上方“小白學(xué)視覺(jué)”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

本文轉(zhuǎn)自|AI算法與圖像處理
一、攝像頭結(jié)構(gòu)和工作原理.
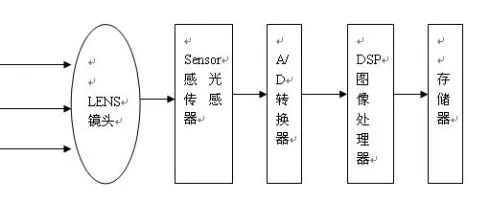
拍攝景物通過(guò)鏡頭,將生成的光學(xué)圖像投射到傳感器上,然后光學(xué)圖像被轉(zhuǎn)換成電信號(hào),電信號(hào)再經(jīng)過(guò)模數(shù)轉(zhuǎn)換變?yōu)閿?shù)字信號(hào),數(shù)字信號(hào)經(jīng)過(guò)DSP加工處理,再被送到電腦中進(jìn)行處理,最終轉(zhuǎn)換成手機(jī)屏幕上能夠看到的圖像。
數(shù)字信號(hào)處理芯片DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通過(guò)一系列復(fù)雜的數(shù)學(xué)算法運(yùn)算,對(duì)數(shù)字圖像信號(hào)參數(shù)進(jìn)行優(yōu)化處理,并把處理后的信號(hào)通過(guò)USB等接口傳到PC等設(shè)備。DSP結(jié)構(gòu)框架:
1. ISP(image signal processor)(鏡像信號(hào)處理器)
2. JPEG encoder(JPEG圖像解碼器)
3. USB device controller(USB設(shè)備控制器)
常見(jiàn)的攝像頭傳感器類(lèi)型主要有兩種,
一種是CCD傳感器(Chagre Couled Device),即電荷耦合器。
一種是CMOS傳感器(Complementary Metal-Oxide Semiconductor)即互補(bǔ)性金屬氧化物半導(dǎo)體。
CCD的優(yōu)勢(shì)在于成像質(zhì)量好,但是制造工藝復(fù)雜,成本高昂,且耗電高。在相同分辨率下,CMOS價(jià)格比CCD便宜,但圖像質(zhì)量相比CCD來(lái)說(shuō)要低一些。CMOS影像傳感器相對(duì)CCD具有耗電低的優(yōu)勢(shì),加上隨著工藝技術(shù)的進(jìn)步,CMOS的畫(huà)質(zhì)水平也不斷地在提高,所以目前市面上的手機(jī)攝像頭都采用CMOS傳感器。
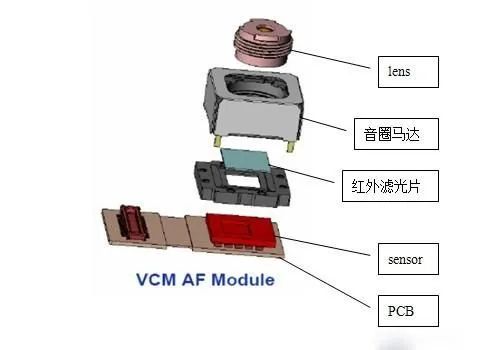
手機(jī)攝像頭的簡(jiǎn)單結(jié)構(gòu)
濾光片有兩大功用:
1.濾除紅外線。濾除對(duì)可見(jiàn)光有干擾的紅外光,使成像效果更清晰。
2.修整進(jìn)來(lái)的光線。感光芯片由感光體(CELL)構(gòu)成,最好的光線是直射進(jìn)來(lái),但為了怕干擾到鄰近感光體,就需要對(duì)光線加以修整,因此那片濾光片不是玻璃,而是石英片,利用石英的物理偏光特性,把進(jìn)來(lái)的光線,保留直射部份,反射掉斜射部份,避免去影響旁邊的感光點(diǎn).
二、相關(guān)參數(shù)和名詞
1、常見(jiàn)圖像格式
1.1 RGB格式:
傳統(tǒng)的紅綠藍(lán)格式,比如RGB565,RGB888,其16-bit數(shù)據(jù)格式為5-bit R + 6-bit G + 5-bit B。G多一位,原因是人眼對(duì)綠色比較敏感。
1.2 YUV格式:
luma (Y) + chroma (UV) 格式。YUV是指亮度參量和色度參量分開(kāi)表示的像素格式,而這樣分開(kāi)的好處就是不但可以避免相互干擾,還可以降低色度的采樣率而不會(huì)對(duì)圖像質(zhì)量影響太大。YUV是一個(gè)比較籠統(tǒng)地說(shuō)法,針對(duì)它的具體排列方式,可以分為很多種具體的格式。
色度(UV)定義了顏色的兩個(gè)方面─色調(diào)與飽和度,分別用CB和CR表示。其中,Cr反映了RGB輸入信號(hào)紅色部分與RGB信號(hào)亮度值之間的差異。而Cb反映的是RGB輸入信號(hào)藍(lán)色部分與RGB信號(hào)亮度值之間的差異。
主要的采樣格式有YCbCr 4:2:0、YCbCr 4:2:2、YCbCr 4:1:1和 YCbCr 4:4:4。
1.3 RAW data格式:
RAW圖像就是CMOS或者CCD圖像感應(yīng)器將捕捉到的光源信號(hào)轉(zhuǎn)化為數(shù)字信號(hào)的原始數(shù)據(jù)。RAW文件是一種記錄了數(shù)碼相機(jī)傳感器的原始信息,同時(shí)記錄了由相機(jī)拍攝所產(chǎn)生的一些元數(shù)據(jù)(Metadata,如ISO的設(shè)置、快門(mén)速度、光圈值、白平衡等)的文件。RAW是未經(jīng)處理、也未經(jīng)壓縮的格式,可以把RAW概念化為“原始圖像編碼數(shù)據(jù)”或更形象的稱(chēng)為“數(shù)字底片”。sensor的每一像素對(duì)應(yīng)一個(gè)彩色濾光片,濾光片按Bayer pattern分布。將每一個(gè)像素的數(shù)據(jù)直接輸出,即RAW RGB data
Raw data(Raw RGB)經(jīng)過(guò)彩色插值就變成RGB.
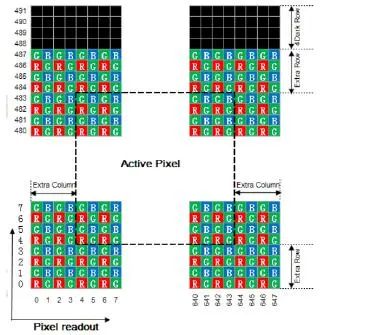
RAW格式圖像示例
2. 相關(guān)技術(shù)指標(biāo)
2.1 圖像解析度/分辨率(Resolution):
SXGA(1280 x1024)又稱(chēng)130萬(wàn)像素
XGA(1024 x768)又稱(chēng)80萬(wàn)像素
SVGA(800 x600)又稱(chēng)50萬(wàn)像素
VGA(640x480)又稱(chēng)30萬(wàn)像素(35萬(wàn)是指648X488)
CIF(352x288) 又稱(chēng)10萬(wàn)像素
SIF/QVGA(320x240)
QCIF(176x144)
QSIF/QQVGA(160x120)
2.2 彩色深度(色彩位數(shù)):
256色灰階,有256種灰色(包括黑白)。
15或16位彩色(高彩色):65,536種顏色。
24位彩色(真彩色):每種原色都有256個(gè)層次,它們的組合便有256*256*256種顏色。
32位彩色:除了24位彩色的顏色外,額外的8位是儲(chǔ)存重疊圖層的圖形資料(alpha頻道)。
2.3 光學(xué)變焦和數(shù)碼變焦:
光學(xué)變焦: 通過(guò)鏡頭的調(diào)整,拉近拉遠(yuǎn)所要拍攝的對(duì)象,保持像素不變和畫(huà)質(zhì)基本不變,卻可以拍到自己 理想的物像。
數(shù)碼變焦:其實(shí)沒(méi)有什么變焦,只是從原圖片中截取出來(lái)放大,你從液晶屏幕上看到變大了,實(shí)際上畫(huà)質(zhì)并沒(méi)有本質(zhì)提高,而像素比你相機(jī)能拍攝的最大像素降低了。畫(huà)質(zhì)上說(shuō)基本是雞肋把,但是可以提供一些方便。
2.4 圖像壓縮方式:
JPEG/M-JPEG
H.261/H.263
MPEG
H.264
2.5 圖像噪音:
指的是圖像中的雜點(diǎn)干撓。表現(xiàn)為圖像中有固定的彩色雜點(diǎn)。
2.6 自動(dòng)白平衡處理技術(shù)(auto White Balance):
簡(jiǎn)單來(lái)說(shuō)就是:攝像機(jī)對(duì)白色物體的還原。相關(guān)概念:色溫。
2.7 視角:
與人的眼睛成像是相成原理,簡(jiǎn)單說(shuō)就是成像范圍。
2.8 自動(dòng)對(duì)焦:
自動(dòng)對(duì)焦可以分成兩大類(lèi):一類(lèi)是基于鏡頭與被拍攝目標(biāo)之間距離測(cè)量的測(cè)距自動(dòng)對(duì)焦,另一類(lèi)是基于對(duì)焦屏上成像清晰的聚焦檢測(cè)自動(dòng)對(duì)焦(清晰度算法)。
注:變焦就是把遠(yuǎn)處的物體拉近。對(duì)焦是讓圖像清晰。
2.9 自動(dòng)曝光和Gamma:
就是光圈和快門(mén)的組合。光圈,快門(mén)速度,ISO。Gamma即人眼對(duì)亮度的響應(yīng)曲線。
三、高通的CAMERA部分硬件架構(gòu)
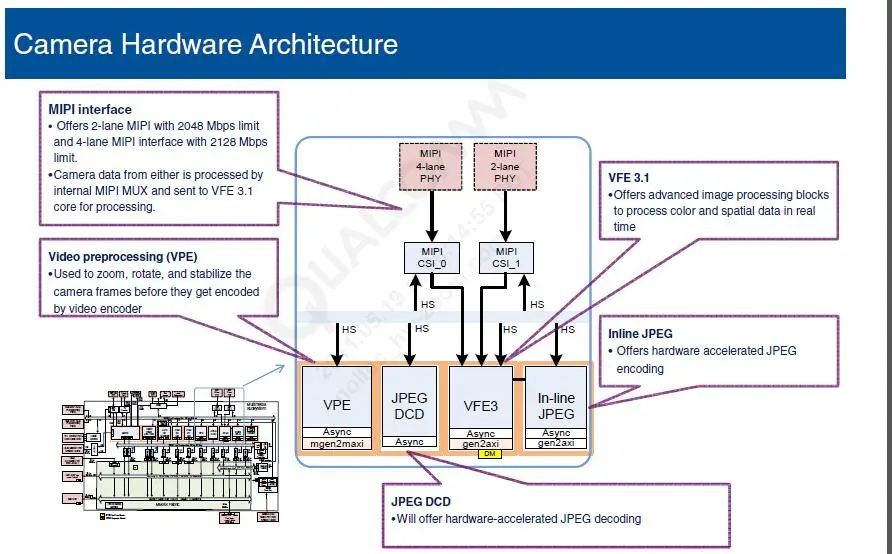
CAMERA部分硬件架構(gòu)
VFE:VIDEO front-end 視頻前端
VPE:Video preprocessing 視頻預(yù)處理
攝像頭模組中自帶了ISP(圖像信號(hào)處理器),所以,VFE和VPE有關(guān)圖像效果處理的功能都是關(guān)閉的。
1.VFE的功能:
1.1 通過(guò)算法提高圖像的質(zhì)量。
1.2 提供高分辨率的圖像的AWB(自動(dòng)白平衡)/AE(自動(dòng)曝光)/AF(自動(dòng)對(duì)焦)算法處理。
1.3 圖像衰減校正。
1.4 低光下的噪聲濾波。
1.5 圖像色彩效果優(yōu)化。
1.6 皮膚顏色效果優(yōu)化。
1.7 圖像抖動(dòng)計(jì)算。
1.8 亮度適應(yīng)算法。
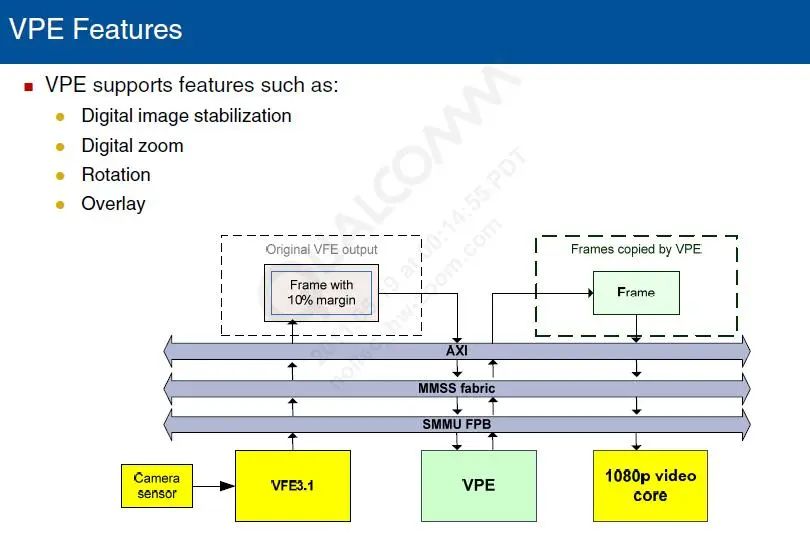
2.VPE的功能:
2.1 圖像穩(wěn)定性。
2.2 數(shù)字對(duì)焦。
2.3 圖像旋轉(zhuǎn)。
2.4 Overlay。
三、android系統(tǒng)camera基本架構(gòu)
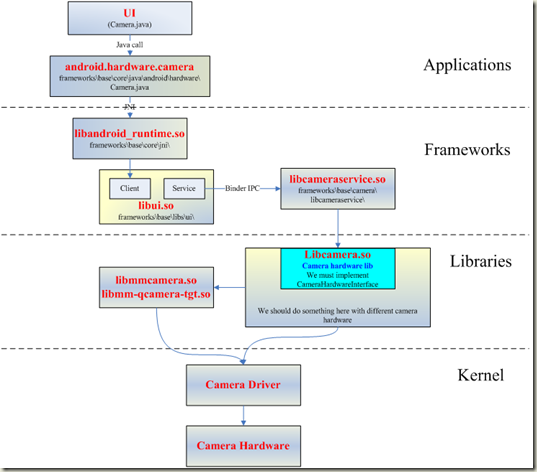
1.應(yīng)用層
Camera 的應(yīng)用層在Android 上表現(xiàn)為直接調(diào)用SDK API 開(kāi)發(fā)的一個(gè)Camera 應(yīng)用APK 包。代碼在/android/packages/apps/Camera 下。主要對(duì) android.hardware.Camera(在Framework中) 類(lèi)的調(diào)用,并且實(shí)現(xiàn)Camera 應(yīng)用的業(yè)務(wù)邏輯和UI 顯示。一個(gè)Android 應(yīng)用中若要使用這個(gè)android.hardware.Camera類(lèi),需要在Manifest 文件聲明Camera 的權(quán)限,另外還 需要添加一些<uses-feature> 元素來(lái)聲明應(yīng)用中的Camera 特性,如自動(dòng)對(duì)焦等。 具體做法可如下:
<uses-permission android:name = "android.permission.CAMERA" />
<uses-feature android:name = "android.hardware.camera" />
<uses-feature android:name = "android.hardware.camera.autofocus" />
2.Framework層
2.1 android.hardware.Camera:代碼位置/android/frameworks/base/core/java/android/hardware/Camera.java
這部分目標(biāo)是framework.jar。這是是Android 提供給app層調(diào)用的java接口。這個(gè)類(lèi)用來(lái)連接或斷開(kāi)一個(gè)Camera 服務(wù),設(shè)置拍攝參數(shù),開(kāi)始、停止預(yù)覽,拍照等。
2.2 android.hardware.Camera這個(gè)類(lèi)是和JNI中定義的類(lèi)是一個(gè),有些方法通過(guò)JNI的方式調(diào)用本地代碼得到,有些方法自己實(shí)現(xiàn)。
Camera的JAVA native調(diào)用部分(JNI):/android/frameworks/base/core/jni/android_hardware_Camera.cpp。Camera.java 承接JAVA 代碼到C++ 代碼的橋梁。編譯生成libandroid_runtime.so 。libandroid_runtime.so庫(kù)是公用的, 其中除了Camera 還有其他方面的功能。
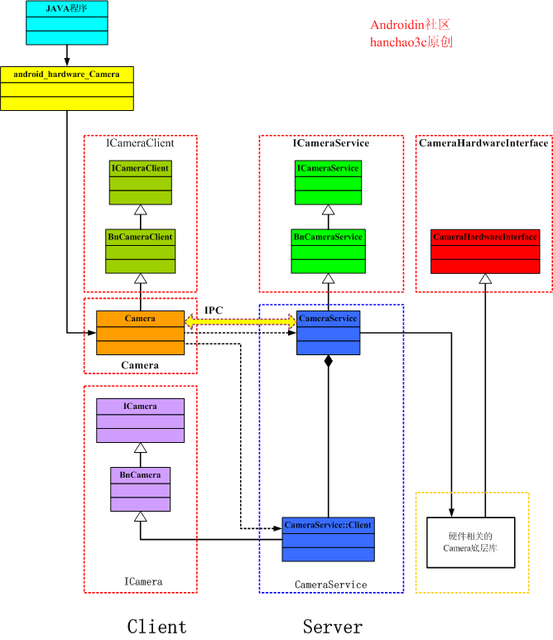
2.3 Camera框架的client部分:
代碼位置:/android/frameworks/base/libs/camera/下5個(gè)文件。
Camera.cpp
CameraParameters.cpp
ICamera.cpp
ICameraClient.cpp
ICameraService.cpp
它們的頭文件在/android/frameworks/base/include/camera目錄下。
這部分的內(nèi)容編譯生成libcamera_client.so 。在Camera 模塊的各個(gè)庫(kù)中,libcamera_client.so 位于核心的位置,作為Camera 框架的 Client 客戶端部分,與另外一部分內(nèi)容服務(wù)端 libcameraservice.so 通過(guò)進(jìn)程間通訊(即Binder 機(jī)制)的方式進(jìn)行通訊。
2.4 Camera框架的service部分:
代碼位置:/android/frameworks/base/services/camera/libcameraservice。
這部分內(nèi)容被編譯成庫(kù)libcameraservice.so 。CameraService 是Camera 服務(wù),Camera 框架的中間層,用于鏈接CameraHardwareInterface 和Client部分 ,它通過(guò)調(diào)用實(shí)際的Camera 硬件接口來(lái)實(shí)現(xiàn)功能,即下層HAL層。
四. 攝像頭預(yù)覽、拍照、錄像基本數(shù)據(jù)流向和處理流程以及驅(qū)動(dòng)調(diào)試
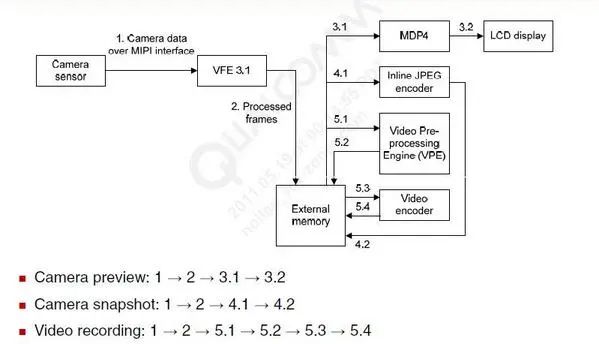
HAl層相關(guān)代碼:(frameworks/base/services/camera/libcameraservice/CameraService.cpp)vendor/qcom/android-open/libcamera2/QualcommCameraHardware.cppvendor/qcom/proprietary/mm-camera/apps/appslib/mm_camera_interface.cvendor/qcom/proprietary/mm-camera/apps/appslib/camframe.cvendor/qcom/proprietary/mm-camera/apps/appslib/snapshot.cvendor/qcom/proprietary/mm-camera/apps/appslib/jpeg_encoder.cvendor/qcom/proprietary/mm-camera/apps/appslib/cam_frame_q.cvendor/qcom/proprietary/mm-camera/apps/appslib/cam_display.cvendor/qcom/proprietary/mm-camera/targets/vfe31/8x60/vendor/qcom/proprietary/mm-camera/targets/vfe31/common/vpe1/QualcommCameraHardware.cpp主要分為三個(gè)部分,preview,snapshot,video。它們分別用一個(gè)pthread進(jìn)行處理。另外還有auto focus功能也是用pthread的方式處理。預(yù)覽或拍照、視頻線程處理得到的數(shù)據(jù)幀都以datacallback的方式回調(diào)到上層CameraService.cpp中,進(jìn)行存儲(chǔ)或預(yù)覽等操作。以下是HAL層部分的代碼大概的調(diào)用結(jié)構(gòu)流程。
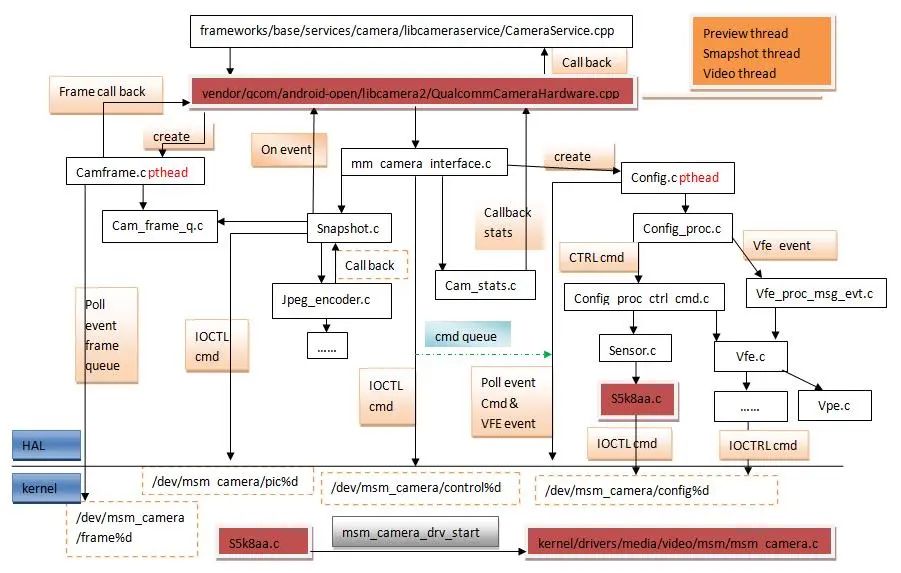
整個(gè)模塊主要巡行三個(gè)主線程:control、config及frame。
control用來(lái)執(zhí)行總的控制,是上層控制接口。
config主要進(jìn)行一些配置,這個(gè)線程里面主要進(jìn)行3A的工作,另外還有一些跟效果有關(guān)的設(shè)置;
frame線程主要用來(lái)做幀queue的循環(huán)獲取處理。所有事件或狀態(tài)的反饋,用回調(diào)函數(shù)的方式傳回QualcommCameraHardware.cpp。
2. 驅(qū)動(dòng)部分從設(shè)備驅(qū)動(dòng)s5k8aa.c開(kāi)始。新建平臺(tái)設(shè)備后,執(zhí)行入口函數(shù)probe時(shí),調(diào)用創(chuàng)建攝像頭設(shè)備功能函數(shù)
int msm_camera_drv_start(struct platform_device *dev,
int (*sensor_probe)(const struct msm_camera_sensor_info *,
struct msm_sensor_ctrl *))
并將設(shè)備信息結(jié)構(gòu)體和攝像頭設(shè)備調(diào)用入口sensor_probe傳入。msm_camera_drv_start(xxx)函數(shù)在msm_camera.c中實(shí)現(xiàn)。他創(chuàng)建了提供上層調(diào)用的四個(gè)終于設(shè)備結(jié)點(diǎn):
/dev/msm_camera/frame%d
/dev/msm_camera/control%d
/dev/msm_camera/config%d
/dev/msm_camera/pic%d
實(shí)現(xiàn)了上層庫(kù)對(duì)VFE模塊,VPE模塊,jpeg_encoder模塊和攝像頭sensor模塊驅(qū)動(dòng)的控制調(diào)用接口。在file_operations中的相應(yīng)函數(shù)中分別實(shí)現(xiàn)的是這些設(shè)備的新建初始化和IOCTL功能調(diào)用接口。
然后這個(gè)函數(shù)還創(chuàng)建了四個(gè)工作隊(duì)列:
struct msm_device_queue event_q;
struct msm_device_queue frame_q;
struct msm_device_queue pict_q;
struct msm_device_queue vpe_q;
event_q包括/dev/msm_camera/control%d傳入的控制信號(hào)隊(duì)列,用于將上層傳下來(lái)的控制命令(command)傳到config thread中去。
frame_q用于對(duì)圖像幀的操作管理,預(yù)覽或錄像時(shí)幀將傳遞給DSP進(jìn)行處理。
pict_q包含拍照幀,用于給jpeg_encoder進(jìn)行圖像編碼處理。
vpe_q是VPE控制命令隊(duì)列。
s5k8aa.c是相應(yīng)攝像頭設(shè)備的驅(qū)動(dòng)部分。它的功能很簡(jiǎn)單,主要實(shí)現(xiàn)sensor模塊的創(chuàng)建、初始化和控制。主要實(shí)現(xiàn)以下三個(gè)函數(shù):
s->s_init = ov2685_sensor_init;
s->s_release = ov2685_sensor_release;
s->s_config = ov2685_sensor_config;
ov2685_sensor_init函數(shù):
主要實(shí)現(xiàn)攝像頭的上電、時(shí)鐘控制(MCLK)、設(shè)備初始化功能。 上電分為DOVDD、DVDD、AVDD、reset、PWDN幾個(gè)部分。需要按照設(shè)備要求順序操作,一般時(shí)鐘控制順序也包含在內(nèi)。 設(shè)備初始化過(guò)程是將sensor設(shè)備的所有寄存器全部初始化一遍,采用IIC方式將初始化寄存器地址和值全部發(fā)送到sensor端。完成后此時(shí)攝像頭模組才能正常工作,并將圖像通過(guò)MIPI線路傳送到CPU端。
ov2685_sensor_config函數(shù):
主要實(shí)現(xiàn)對(duì)sensor的各種配置接口,相應(yīng)的有幀率配置,白平衡效果設(shè)置,曝光度設(shè)置,特效設(shè)置等等。相應(yīng)接口將配置好的寄存器列表通過(guò)IIC發(fā)送到sensor中。
3. 攝像頭調(diào)試中的幾個(gè)問(wèn)題點(diǎn):
1.1 是否正確上電,是否有時(shí)鐘波形輸出。 檢測(cè)輸出電壓的電壓值是否和上電時(shí)序以及MCLK是否符合sensor的要求。這部分可以用示波器和萬(wàn)用表測(cè)量。測(cè)量電壓值和上電時(shí)序以及MCLK的時(shí)鐘頻率是否正確。
1.2 IIC讀寫(xiě)是否正常。調(diào)試CPU與ISP間的I2C通信。 檢測(cè)包括IIC地址是否正確,協(xié)議是否匹配。這部分也可以用示波器測(cè)量IIC的SDA、CLK的峰值、波形邏輯是否正確。
1.3 正確上電并初始化以后sensor模塊是否正常工作。 這部分主要通過(guò)用示波器測(cè)量MIPI線路的數(shù)據(jù)和時(shí)鐘PIN是否正確,它的波形是否含有數(shù)據(jù),是否標(biāo)準(zhǔn)波形,峰值有沒(méi)有達(dá)到要求等。
1.4 如果以上都正確了以后,MIPI控制器將接收到中斷,并開(kāi)始處理圖像信號(hào)。此時(shí)如果出錯(cuò),可以通過(guò)中斷信號(hào)的出錯(cuò)值查看錯(cuò)誤狀態(tài)。除CPU端是否正常初始化工作的問(wèn)題外,需要關(guān)注模組端設(shè)置的圖像格式和CPU接收的默認(rèn)圖像格式和圖像大小(SIZE)是否一致。模組中圖片格式和圖像大小通過(guò)寄存器值查看。CPU端接收?qǐng)D片格式和圖像大小在HAL部分的s5k8aa中設(shè)置, 拍照源圖像大小和預(yù)覽源圖像大小需要分別設(shè)置。
以上部分完成后,攝像頭可以正確預(yù)覽。
 End
End
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺(jué)、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱(chēng)+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺(jué)SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~