
FreeRTOS系列第22篇---FreeRTOS任務(wù)切換分析
ID:技術(shù)讓夢想更偉大
整理:李肖遙
FreeRTOS任務(wù)相關(guān)的代碼大約占總代碼的一半左右,這些代碼都在為一件事情而努力,即找到優(yōu)先級最高的就緒任務(wù),并使之獲得CPU運行權(quán)。
任務(wù)切換是這一過程的直接實施者,為了更快的找到優(yōu)先級最高的就緒任務(wù),任務(wù)切換的代碼通常都是精心設(shè)計的,甚至?xí)玫絽R編指令或者與硬件相關(guān)的特性,比如Cortex-M3的CLZ指令。
因此任務(wù)切換的大部分代碼是由硬件移植層提供的,不同的平臺,實現(xiàn)發(fā)方法也可能不同。
?這篇文章以Cortex-M3為例,講述FreeRTOS任務(wù)切換的過程。
?
「FreeRTOS有兩種方法觸發(fā)任務(wù)切換:」
執(zhí)行系統(tǒng)調(diào)用,比如普通任務(wù)可以使用 taskYIELD()強制任務(wù)切換,中斷服務(wù)程序中使用portYIELD_FROM_ISR()強制任務(wù)切換;系統(tǒng)節(jié)拍時鐘中斷
對于Cortex-M3平臺,這兩種方法的實質(zhì)是一樣的,都會使能一個PendSV中斷,在PendSV中斷服務(wù)程序中,找到最高優(yōu)先級的就緒任務(wù),然后讓這個任務(wù)獲得CPU運行權(quán),從而完成任務(wù)切換。
對于第一種任務(wù)切換方法,不管是使用taskYIELD()還是portYIELD_FROM_ISR(),最終都會執(zhí)行宏portYIELD(),這個宏的定義如下:
#define portYIELD() \
{ \
/*產(chǎn)生PendSV中斷*/ \
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT; \
}
對于第二種任務(wù)切換方法,在系統(tǒng)節(jié)拍時鐘中斷服務(wù)函數(shù)中,首先會更新tick計數(shù)器的值、查看是否有任務(wù)解除阻塞,如果有任務(wù)解除阻塞的話,則使能PandSV中斷,代碼如下所示:
void xPortSysTickHandler( void )
{
/* 設(shè)置中斷掩碼 */
vPortRaiseBASEPRI();
{
/* 增加tick計數(shù)器值,并檢查是否有任務(wù)解除阻塞 */
if( xTaskIncrementTick() != pdFALSE )
{
/* 需要任務(wù)切換。產(chǎn)生PendSV中斷 */
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT;
}
}
vPortClearBASEPRIFromISR();
}
從上面的代碼中可以看出,PendSV中斷的產(chǎn)生是通過代碼:
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT
實現(xiàn)的,它向中斷狀態(tài)寄存器bit28位寫入1,將PendSV中斷設(shè)置為掛起狀態(tài);
等到優(yōu)先級高于PendSV的中斷執(zhí)行完成后,PendSV中斷服務(wù)程序?qū)⒈粓?zhí)行,進行任務(wù)切換工作。
Cortex-M3架構(gòu)下,PendSV中斷服務(wù)程序源碼如下所示,這篇文章重點分析這段代碼。
__asm void xPortPendSVHandler( void )
{
extern uxCriticalNesting;
extern pxCurrentTCB; /* 指向當(dāng)前激活的任務(wù) */
extern vTaskSwitchContext;
PRESERVE8
mrs r0, psp /* PSP內(nèi)容存入R0 */
isb /* 指令同步隔離,清流水線 */
ldr r3, =pxCurrentTCB /* 當(dāng)前激活的任務(wù)TCB指針存入R2 */
ldr r2, [r3]
stmdb r0!, {r4-r11} /* 保存剩余的寄存器,異常處理程序執(zhí)行前,硬件自動將xPSR、PC、LR、R12、R0-R3入棧 */
str r0, [r2] /* 將新的棧頂保存到任務(wù)TCB的第一個成員中 */
stmdb sp!, {r3, r14} /* 將R3和R14臨時壓入堆棧,因為即將調(diào)用函數(shù)vTaskSwitchContext,調(diào)用函數(shù)時,返回地址自動保存到R14中,所以一旦調(diào)用發(fā)生,R14的值會被覆蓋,因此需要入棧保護; R3保存的當(dāng)前激活的任務(wù)TCB指針(pxCurrentTCB)地址,函數(shù)調(diào)用后會用到,因此也要入棧保護*/
mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY /* 進入臨界區(qū) */
msr basepri, r0
dsb /* 數(shù)據(jù)和指令同步隔離 */
isb
bl vTaskSwitchContext /* 調(diào)用函數(shù),尋找新的任務(wù)運行,通過使變量pxCurrentTCB指向新的任務(wù)來實現(xiàn)任務(wù)切換 */
mov r0, #0 /* 退出臨界區(qū)*/
msr basepri, r0
ldmia sp!, {r3, r14} /* 恢復(fù)R3和R14*/
ldr r1, [r3]
ldr r0, [r1] /* 當(dāng)前激活的任務(wù)TCB第一項保存了任務(wù)堆棧的棧頂,現(xiàn)在棧頂值存入R0*/
ldmia r0!, {r4-r11} /* 出棧*/
msr psp, r0
isb
bx r14 /* 異常發(fā)生時,R14中保存異常返回標志,包括返回后進入線程模式還是處理器模式、使用PSP堆棧指針還是MSP堆棧指針,當(dāng)調(diào)用 bx r14指令后,硬件會知道要從異常返回,然后出棧,這個時候堆棧指針PSP已經(jīng)指向了新任務(wù)堆棧的正確位置,當(dāng)新任務(wù)的運行地址被出棧到PC寄存器后,新的任務(wù)也會被執(zhí)行。*/
nop
}
為了便于理解上面的代碼,我們先用流程圖的方式將整個過程畫出來,然后再逐句分析代碼。因為圖形可以簡化程序,并且信息更容易接受。
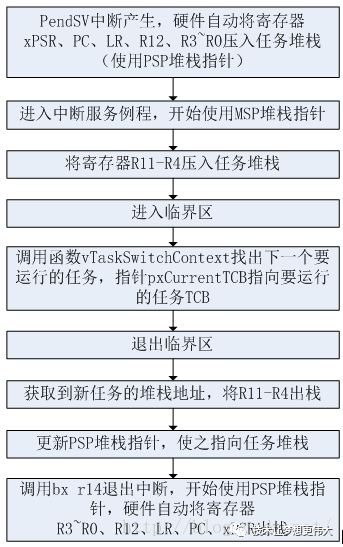
先強調(diào)圖1-1中的幾個術(shù)語,首先是“主堆棧指針MSP”和“進程堆棧指針PSP”。
對于Cortex-M3硬件,當(dāng)系統(tǒng)復(fù)位后,默認使用MSP指針。
MSP指針用于操作系統(tǒng)內(nèi)核以及處理異常(也就是說中斷服務(wù)程序中默認強制使用MSP指針,這是硬件自動設(shè)置的)。
任務(wù)(進程)使用PSP指針,操作系統(tǒng)負責(zé)從MSP指針切換到PSP指針。
這個過程在《FreeRTOS高級篇3---啟動調(diào)度器》一文的最后部分中「進行了講解」:
在SVC中斷服務(wù)程序中啟動第一個任務(wù),當(dāng)從SVC中斷服務(wù)退出前,通過向r14寄存器最后4位按位或上0x0D,使得硬件在退出時使用進程堆棧指針PSP完成出棧操作并返回后進入線程模式、返回Thumb狀態(tài)。
其次,“堆棧”和“任務(wù)堆棧”也值得強調(diào)一下。
每個任務(wù)都有自己的“任務(wù)堆棧”,在任務(wù)創(chuàng)建時會創(chuàng)建指定大小的任務(wù)堆棧,這是任務(wù)能夠獨立運行的前提條件之一。
在任務(wù)中定義的局部變量,會優(yōu)先使用寄存器,寄存器不夠時就使用任務(wù)堆棧的空間。
如果在任務(wù)中調(diào)用其它函數(shù),則調(diào)用前的保存信息也存到任務(wù)堆棧中去。
根據(jù)任務(wù)代碼來估算任務(wù)堆棧的大小是件十分重要的技能。
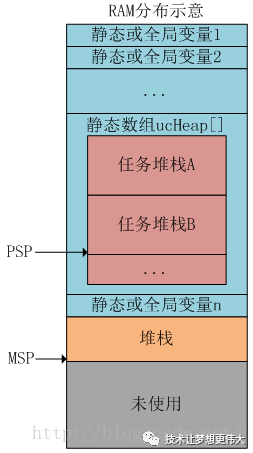
前面也說了,Cortex-M3硬件有兩個堆棧指針,操作系統(tǒng)內(nèi)核以及異常處理程序中使用MSP指針,所以它們也需要一個堆棧空間,我們稱之為“堆棧”;
這個堆棧空間和任務(wù)堆棧空間在物理上是絕對不可以重疊的,圖1-2展示了一個編譯好的程序可能的RAM分配情況(堆棧向下生長)。
有了上面的基礎(chǔ),接下來我們來分析PendSV中斷服務(wù)程序。
mrs r0, psp
是將任務(wù)堆棧指針PSP的值保存到寄存器R0中,因為接下來我們會將寄存器R4~R11也保存到任務(wù)堆棧中,但是我們沒有哪個匯編指令能直接操作PSP完成入棧,所以只能借助R0。
ldr r3, =pxCurrentTCB /* 當(dāng)前激活的任務(wù)TCB指針存入R2 */
ldr r2, [r3]
這兩句代碼是獲取當(dāng)前激活的任務(wù)TCP指針,指針pxCurrentTCB前面文章已經(jīng)提到過很多次了,它是位于tasks.c文件中定義的唯一一個全局指針型變量,指向當(dāng)前激活的任務(wù)TCB。
stmdb r0!, {r4-r11}
這句代碼用于將寄存器R4~R11保存到當(dāng)前激活的程序任務(wù)堆棧中,并且同步更新寄存器R0的值。
str r0, [r2]
寄存器R2中保存當(dāng)前激活的任務(wù)TCB指針,在《FreeRTOS高級篇2---FreeRTOS任務(wù)創(chuàng)建分析》中講任務(wù)TCB數(shù)據(jù)結(jié)構(gòu)時我們知道,任務(wù)TCB數(shù)據(jù)結(jié)構(gòu)第一個成員一定是指向任務(wù)當(dāng)前堆棧棧頂?shù)闹羔樧兞?code style="overflow-wrap: break-word;margin-right: 2px;margin-left: 2px;font-family: "Operator Mono", Consolas, Monaco, Menlo, monospace;word-break: break-all;color: rgb(53, 148, 247);background: rgba(59, 170, 250, 0.1);display: inline-block;padding-right: 2px;padding-left: 2px;border-radius: 2px;height: 21px;line-height: 22px;">pxTopOfStack。
這句代碼將R0的內(nèi)容保存到任務(wù)TCB數(shù)據(jù)結(jié)構(gòu)的第一個成員pxTopOfStack中,也就是將最新的任務(wù)堆棧指針保存到任務(wù)TCB的pxTopOfStack字段中。
當(dāng)任務(wù)被激活時,就是從這個字段中獲取任務(wù)堆棧指針,然后完成數(shù)據(jù)出棧操作的。
stmdb sp!, {r3, r14}
將R3和R14臨時壓入堆棧,因為即將調(diào)用函數(shù)vTaskSwitchContext。調(diào)用函數(shù)時,返回地址自動保存到R14中,所以一旦調(diào)用發(fā)生,R14的值會被覆蓋,因此需要入棧保護。
R3保存的當(dāng)前激活的任務(wù)TCB指針(pxCurrentTCB)地址,函數(shù)調(diào)用后會用到,因此也要入棧保護。
mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY
msr basepri, r0
這兩句代碼用來進入臨界區(qū),中斷優(yōu)先級號大于等于configMAX_SYSCALL_INTERRUPT_PRIORITY的中斷都會被屏蔽。
bl vTaskSwitchContext
調(diào)用函數(shù),選擇下一個要執(zhí)行的任務(wù),也就是尋找處于就緒態(tài)的最高優(yōu)先級任務(wù)。
變量pxCurrentTCB指向找到的任務(wù)TCB。這個函數(shù)是核心中的核心,所有的其它代碼都是為了保證這個函數(shù)能正確運行。
某些運行FreeRTOS的硬件有兩種方法:「通用方法和特定于硬件的方法」(以下簡稱“特殊方法”)。
對于通用方法:
configUSE_PORT_OPTIMISED_TASK_SELECTION設(shè)置為0或者硬件不支持這種特殊方法。可以用于所有FreeRTOS支持的硬件。 完全用C實現(xiàn),效率略低于特殊方法。 不強制要求限制最大可用優(yōu)先級數(shù)目
對于特殊方法:
并非所有硬件都支持。 必須將 configUSE_PORT_OPTIMISED_TASK_SELECTION設(shè)置為1。依賴一個或多個特定架構(gòu)的匯編指令(一般是類似計算前導(dǎo)零[CLZ]指令)。 比通用方法更高效。 一般強制限定最大可用優(yōu)先級數(shù)目為32(0~31)。
Cortex-M3即支持通用方法也支持特殊方法,默認的移植層使用特殊方法。我們先來看一下通用方法如何找到下一個要執(zhí)行的任務(wù)。
在函數(shù)vTaskSwitchContext中使用宏taskSELECT_HIGHEST_PRIORITY_TASK()完成任務(wù)尋址工作,使用通用方法時,這個宏的代碼如下所示。
pxReadyTasksLists是定義在tasks.c中的靜態(tài)列表數(shù)組,表示就緒任務(wù)列表數(shù)組。
在《FreeRTOS高級篇2---FreeRTOS任務(wù)創(chuàng)建分析》中講過這個變量:新創(chuàng)建任務(wù)的過程中,任務(wù)TCB中的狀態(tài)列表項xStateListItem會掛接到就緒任務(wù)列表數(shù)組中。
uxTopReadyPriority也是定義在tasks.c中的靜態(tài)變量,在此之前,它已經(jīng)代表處于就緒態(tài)任務(wù)的最高優(yōu)先級值;
在FreeRTOS任務(wù)創(chuàng)建與分析一文中,我們也講到了這個變量:每次任務(wù)創(chuàng)建,都會判斷新任務(wù)的優(yōu)先級是否大于這個變量,如果大于,還會更新這個變量的值。
while()循環(huán)從優(yōu)先級uxTopReadyPriority開始,從就緒列表數(shù)組pxReadyTasksLists中找出優(yōu)先級最高的任務(wù),然后調(diào)用宏listGET_OWNER_OF_NEXT_ENTRY獲取最高優(yōu)先級列表中的下一個列表項,并從該列表項中獲取任務(wù)TCB指針賦給變量pxCurrentTCB。
#define taskSELECT_HIGHEST_PRIORITY_TASK() \
{ \
/* 從就緒列表數(shù)組中找出最高優(yōu)先級列表*/ \
while( listLIST_IS_EMPTY( &( pxReadyTasksLists[ uxTopReadyPriority ] ) ) ) \
{ \
configASSERT( uxTopReadyPriority ); \
--uxTopReadyPriority; \
} \
\
/* 相同優(yōu)先級的任務(wù)使用時間片共享處理器就是通過這個宏實現(xiàn)*/ \
listGET_OWNER_OF_NEXT_ENTRY(pxCurrentTCB, &( pxReadyTasksLists[ uxTopReadyPriority ] ) ); \
} /* taskSELECT_HIGHEST_PRIORITY_TASK */
對于Cortex-M3硬件,還支持特殊方法選擇下一個要執(zhí)行的任務(wù),那就是利用硬件提供的計算前導(dǎo)零指令CLZ。
特殊方法時,宏taskSELECT_HIGHEST_PRIORITY_TASK()的代碼如下所示。
#define taskSELECT_HIGHEST_PRIORITY_TASK() \
{ \
UBaseType_t uxTopPriority; \
\
/* 從就緒列表數(shù)組中找出最高優(yōu)先級列表*/ \
portGET_HIGHEST_PRIORITY( uxTopPriority, uxTopReadyPriority ); \
listGET_OWNER_OF_NEXT_ENTRY(pxCurrentTCB, &( pxReadyTasksLists[ uxTopPriority ] ) ); \
} /* taskSELECT_HIGHEST_PRIORITY_TASK() */
與通用方法相比,可以發(fā)現(xiàn)從就緒列表數(shù)組中找出最高優(yōu)先級列表代碼不同了,特殊方法使用宏portGET_HIGHEST_PRIORITY來實現(xiàn),將宏定義替換后,代碼為:
uxTopPriority = ( 31UL - ( uint32_t ) __clz( (uxTopReadyPriority) ) )
在此之前,靜態(tài)變量uxTopReadyPriority同樣已經(jīng)包含處于就緒態(tài)任務(wù)的最高優(yōu)先級的信息。
與通用方法中使用任務(wù)優(yōu)先級數(shù)值不同,在特殊方法中,uxTopReadyPriority使用每一位來表示任務(wù),比如變量uxTopReadyPriority的bit0為1,則表示存在優(yōu)先級為0的就緒任務(wù),bit10為1則表示存在優(yōu)先級為10的就緒任務(wù)。
由于32位整形數(shù)最多只有32位,因此使用這種特殊方法限定最大可用優(yōu)先級數(shù)目為32,即優(yōu)先級0~31。
我們這來看看__clz( (uxTopReadyPriority)是什么意思,__clz()會被匯編指令CLZ替換掉,這個指令用來計算一個變量從最高位開始的連續(xù)零的個數(shù)。
舉個例子,假如變量uxTopReadyPriority為0x09(二進制為:0000 0000 0000 0000 0000 0000 0000 1001),即bit3和bit0為1,表示存在優(yōu)先級為0和3的就緒任務(wù)。
則__clz( (uxTopReadyPriority)的值為28,uxTopPriority =31-28=3,即優(yōu)先級為3的任務(wù)是就緒態(tài)最高優(yōu)先級任務(wù)。
下面的代碼跟通用方法一樣,調(diào)用宏listGET_OWNER_OF_NEXT_ENTRY獲取最高優(yōu)先級列表中的下一個列表項,并從該列表項中獲取任務(wù)TCB指針賦給變量pxCurrentTCB。
mov r0, #0 /* 退出臨界區(qū)*/
msr basepri, r0
這兩句代碼用來退出臨界區(qū),通過向寄存器BASEPRI寫入數(shù)值0來實現(xiàn)。
ldmia sp!, {r3, r14}
這句代碼將寄存器R3和R14從堆棧中恢復(fù),現(xiàn)在R3保存變量pxCurrentTCB的地址;
「需要注意的是」,變量pxCurrentTCB在函數(shù)vTaskSwitchContext中可能已被修改,指向新的最高優(yōu)先級就緒任務(wù);R14保存退出異常需要的信息。
ldr r1, [r3]
ldr r0, [r1]
這兩句代碼獲取變量pxCurrentTCB指向的任務(wù)TCB指針,并將TCB的第一個成員——當(dāng)前堆棧棧頂?shù)闹羔樧兞?code style="overflow-wrap: break-word;margin-right: 2px;margin-left: 2px;font-family: "Operator Mono", Consolas, Monaco, Menlo, monospace;word-break: break-all;color: rgb(53, 148, 247);background: rgba(59, 170, 250, 0.1);display: inline-block;padding-right: 2px;padding-left: 2px;border-radius: 2px;height: 21px;line-height: 22px;">pxTopOfStack的值保存到寄存器R0中,也就是將即將運行的任務(wù)堆棧棧頂值存入R0。
ldmia r0!, {r4-r11}
將寄存器R4~R11出棧,并同時更新R0的值。
msr psp, r0
將最新的任務(wù)堆棧棧頂賦值給線程堆棧指針PSP。
bx r14
從異常中斷服務(wù)程序退出。異常發(fā)生時,R14中保存異常返回標志,包括返回后進入線程模式還是處理器模式、使用PSP堆棧指針還是MSP堆棧指針。
當(dāng)調(diào)用 bx r14指令后,硬件會知道要從異常返回,然后出棧,這個時候堆棧指針PSP已經(jīng)指向了新任務(wù)堆棧的正確位置,當(dāng)新任務(wù)的運行地址被出棧到PC寄存器后,新的任務(wù)也會被執(zhí)行。
至此,任務(wù)切換完成。
嵌入式編程專輯 Linux 學(xué)習(xí)專輯 C/C++編程專輯 Qt進階學(xué)習(xí)專輯