
雷達(dá)的工作原理
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)
推薦閱讀

雷達(dá)最初被軍方用來檢測(cè)敵機(jī),在戰(zhàn)爭(zhēng)期間是一個(gè)重要的傳感器被各方使用。如今,它被廣泛用于自適應(yīng)巡航控制以及自動(dòng)駕駛中的障礙物檢測(cè)。下面讓我們看一下該傳感器的工作原理、優(yōu)缺點(diǎn)以及如何檢測(cè)物體的位置和速度。
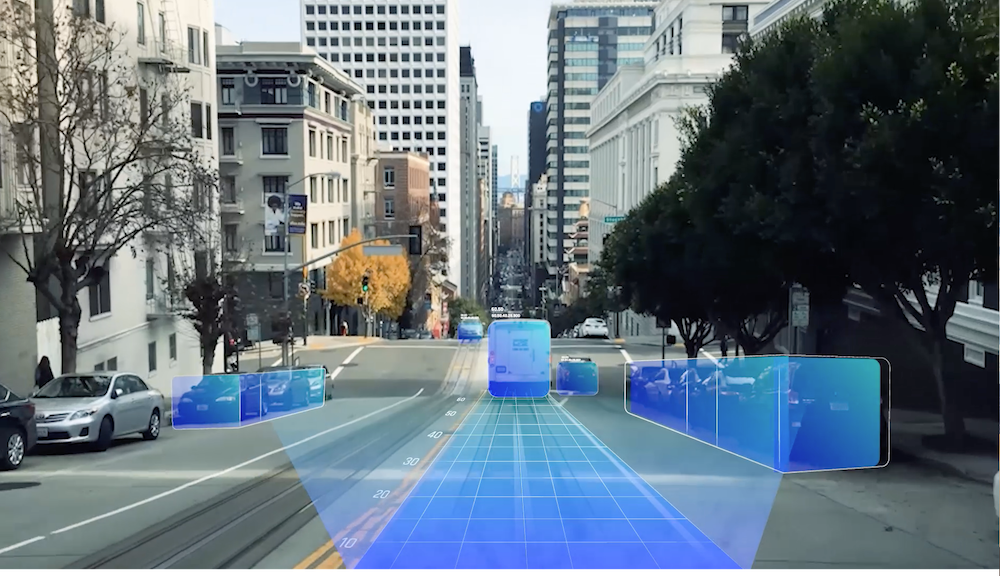
在自動(dòng)駕駛汽車中,雷達(dá)用于自動(dòng)駕駛時(shí)是一種出色的互補(bǔ)傳感器,可以解決其他傳感器的一些弱點(diǎn)。像Tesla或Comma.ai之類的公司使用RADAR與攝像頭相結(jié)合來確保系統(tǒng)能正常工作,并獲得了出色的傳感器融合模塊。
總而言之,雷達(dá)可以直接測(cè)量物體的速度,并且可以在白天,夜晚,雨天,霧天,大雪等不同場(chǎng)景下工作,而其他傳感器可能會(huì)遇到問題。
介紹
RADAR利用無(wú)線測(cè)距,通過發(fā)出電磁(EM)波,該電磁波在遇到障礙物時(shí)會(huì)反射。由于它使用EM波工作,因此可以在任何條件下工作。
我們必須了解的一件事是,我們正在處理電磁波,就像在高中物理中一樣。
每個(gè)波都有一個(gè)波長(zhǎng),一個(gè)頻率,一個(gè)振幅和一個(gè)相位。

處理這些波浪將幫助我們找到障礙。
FMCW
有許多不同類型的雷達(dá),其中最常用的是一種稱為FMCW-調(diào)頻連續(xù)波。該波看起來像這樣:這是一個(gè)稱為鋸齒的信號(hào),其頻率可以隨時(shí)間增加或減少。
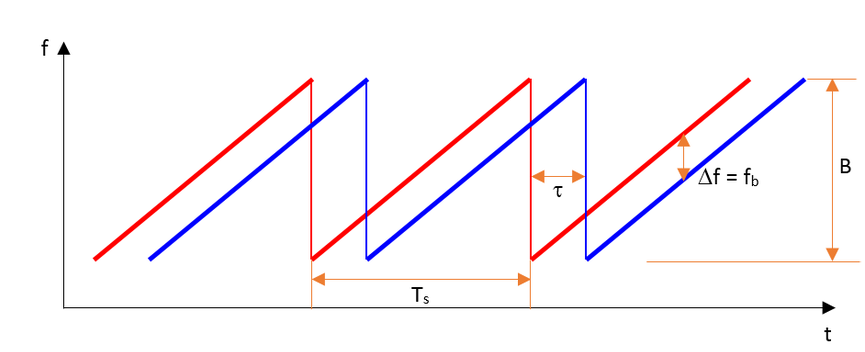
(資源)
FMCW雷達(dá)的硬件包括很多東西:
頻率合成器-一種將波設(shè)置為正確頻率的裝置。
功率放大器—一種放大信號(hào)的東西,以便RADAR可以在遠(yuǎn)距離(300m)看到。
天線—一種將電能轉(zhuǎn)換為電磁波的東西,該電磁波被發(fā)送到特定的方向并被反射(返回到天線)。
混頻器-有助于頻移的功能。
處理器-就像在任何計(jì)算機(jī)中一樣,處理器可以幫助進(jìn)行計(jì)算,我們甚至可以處理信號(hào)來進(jìn)行機(jī)器學(xué)習(xí),聚類,跟蹤等。
當(dāng)發(fā)射的波到達(dá)物體時(shí);它反映了。但是如何反映的?大家會(huì)注意到,物體并不總是完全反射回RADAR的天線。反射指數(shù)稱為雷達(dá)橫截面(RCS)?用于并考慮到:目標(biāo)的幾何形狀、雷達(dá)的方向、頻次、靶材。RCS是一種考慮了所有這些因素的指標(biāo)。
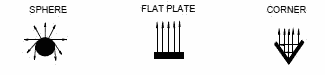
現(xiàn)在考慮一下隱形飛機(jī)的以下圖像。這種類型的飛機(jī)可能完全未被RADAR探測(cè)到,這是因?yàn)槠鋷缀涡螤钤O(shè)計(jì)可將波向其他方向偏轉(zhuǎn),其光滑的表面以及旨在吸收波的非反射性涂料,因此它們不會(huì)返回發(fā)射器。

由于反射率和其他因素,可以使用RADAR對(duì)障礙物進(jìn)行分類。
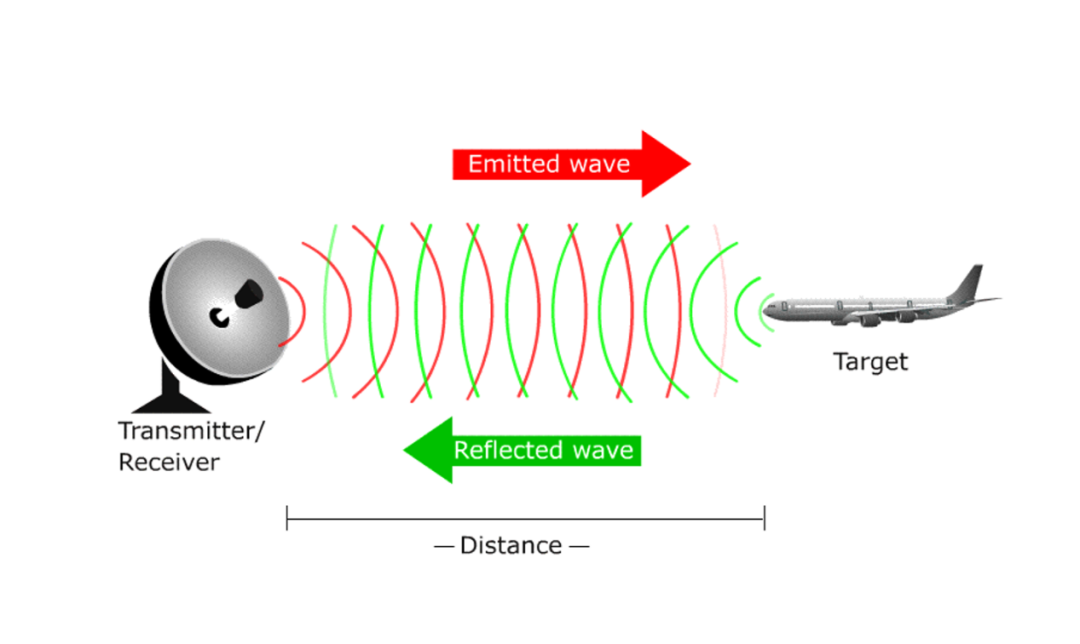
當(dāng)我們想使用雷達(dá)時(shí),涉及許多不同的方程式。實(shí)際上,這是100%的信號(hào)處理。但是,數(shù)學(xué)很簡(jiǎn)單,在數(shù)學(xué)上并不難。假設(shè)我們前面有輛汽車,我們需要知道它與我們之間的距離。

我們知道信號(hào)的速度,因?yàn)樗诳罩袀鞑ァ?strong>c = 3×10?。
我們可以測(cè)量信號(hào)返回的時(shí)間:T。那么,達(dá)到目標(biāo)所需的時(shí)間為T / 2。
范圍只是R =?c * T / 2。

這就是所謂的多普勒效應(yīng)。
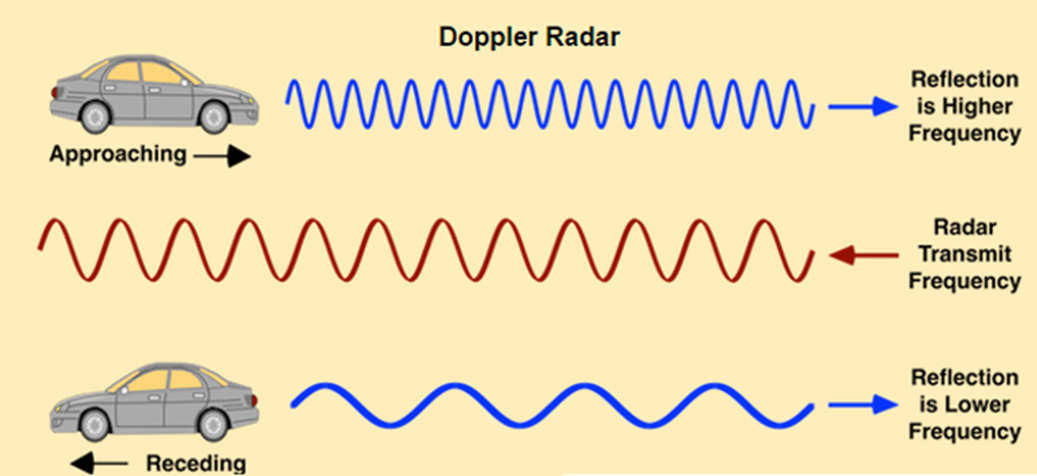
如大家所見,幾個(gè)波完全不同。
紅波是雷達(dá)發(fā)射的信號(hào)。
頂部的藍(lán)波是正在接近的車輛的反射波-波長(zhǎng)很小。
底部的藍(lán)色波是遠(yuǎn)離我們的車輛的反射波-波長(zhǎng)很大。
當(dāng)我們計(jì)算頻率偏移時(shí),我們可以確定車輛的速度和方向:這稱為多普勒效應(yīng)。
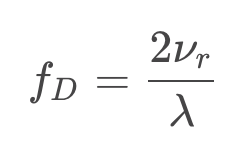
多普勒頻移方程
我們知道:
fD-頻率偏移(已測(cè)量,未保留詳細(xì)信息)
λ—波長(zhǎng)
因此,我們可以確定車輛的速度ν。
RADAR的輸出沒有任何邏輯信息,它只顯示了波動(dòng)。我們?cè)诖瞬ㄖ形ㄒ豢梢钥吹降氖欠群皖l率。利用快速傅立葉變換(FFT)將該波轉(zhuǎn)換為可解釋的信號(hào)。

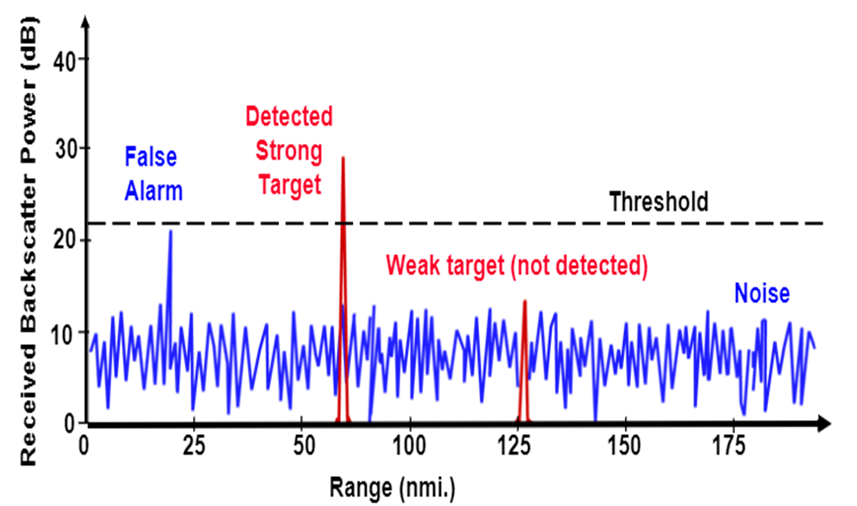
一旦進(jìn)入頻域,我們可以注意到一些波在不同的頻率處反射,并將它們與其他波分開。每個(gè)峰代表檢測(cè)到的障礙。
雷達(dá)是一種非常復(fù)雜的傳感器,對(duì)于一個(gè)障礙RADAR可能輸出5或6次檢測(cè)。沒有障礙物時(shí)出于一些未知原因,雷達(dá)可能也會(huì)顯示了一些檢測(cè)結(jié)果。我們稱之為噪音。噪音來自各種事物,蘇打水可以反射一些波,讓他并看起來像是障礙物。為了過濾噪聲,我們使用一種稱為SNR或信噪比的度量。雷達(dá)輸出波和振幅。幅度越高,檢測(cè)的可能性越高。

最后,我們能夠檢測(cè)到障礙物并估算其速度。但是我們得到的僅僅是反射波,這要?dú)w功于FFT。我們可以輸出許多結(jié)果,并且可能需要對(duì)輸出進(jìn)行聚類。

聚類算法是基于距離計(jì)算的算法,例如歐幾里得聚類或K均值聚類。
結(jié)論—
RADAR是一個(gè)非常強(qiáng)大的工具。由于噪音,它不能真正在自動(dòng)駕駛環(huán)境中單獨(dú)使用。但它可以與相機(jī)或LiDAR結(jié)合使用,功能非常強(qiáng)大。它可以在許多條件下工作,并且可以直接估算范圍和速度。通過一些工作,它甚至可以進(jìn)行物體的分類。
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺SLAM“。請(qǐng)按照格式備注,否則不予通過。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~