
智駕工程師隨筆-通信、軟硬件
(第408期)

文丨船尾
汽車主機(jī)廠ADAS研發(fā)人員
整理一些ADAS工作中常用通信、軟硬件開(kāi)發(fā)領(lǐng)域的知識(shí)點(diǎn),供查閱。
-
匯編。匯編大多是指匯編語(yǔ)言,匯編程序。把匯編語(yǔ)言翻譯成機(jī)器語(yǔ)言的過(guò)程稱為匯編。在匯編語(yǔ)言中,用助記符(Memoni)代替操作碼,用地址符號(hào)(Symbol)或標(biāo)號(hào)(Label)代替地址碼。這樣用符號(hào)代替機(jī)器語(yǔ)言的二進(jìn)制碼,就把機(jī)器語(yǔ)言變成了匯編語(yǔ)言。于是匯編語(yǔ)言亦稱為符號(hào)語(yǔ)言。用匯編語(yǔ)言編寫(xiě)的程序,機(jī)器不能直接識(shí)別,要由一種程序?qū)R編語(yǔ)言翻譯成機(jī)器語(yǔ)言,這種起翻譯作用的程序叫匯編程序,匯編程序是系統(tǒng)軟件中語(yǔ)言處理的系統(tǒng)軟件。
-
端口。分為硬件、網(wǎng)絡(luò)、軟件端口(了解少,暫不展開(kāi))
硬件端口: CPU通過(guò)接口寄存器或特定電路與外設(shè)進(jìn)行數(shù)據(jù)傳送,這些寄存器或特定電路稱之為端口。
其中硬件領(lǐng)域的端口又稱接口,如:并行端口、串行端口等。
網(wǎng)絡(luò)端口: 在網(wǎng)絡(luò)技術(shù)中,端口(Port)有好幾種意思。集線器、交換機(jī)、路由器的端口指的是連接其他網(wǎng)絡(luò)設(shè)備的接口,如RJ-45端口、Serial端口等。我們 這里所指的端口不是指物理意義上的端口,而是特指TCP/IP協(xié)議中的端口,是邏輯意義上的端口。
軟件端口:緩沖區(qū)。
-
看門狗。
看門狗,又叫 watchdog。此狗非彼狗。
從本質(zhì)上來(lái)說(shuō)看門狗就是一個(gè)定時(shí)器電路,一般有一個(gè)輸入和一個(gè)輸出,其中輸入叫做喂狗,輸出一般連接到另外一個(gè)部分的復(fù)位端,一般是連接到單片機(jī)。看門狗的功能是定期的查看芯片內(nèi)部的情況,一旦發(fā)生錯(cuò)誤就向芯片發(fā)出重啟信號(hào)。看門狗命令在程序的中斷中擁有最高的優(yōu)先級(jí)。
看門狗的功能原理主要涉及兩個(gè)方面:監(jiān)控器和定時(shí)器。監(jiān)控器:監(jiān)控器是看門狗的核心部分,其主要功能是監(jiān)測(cè)系統(tǒng)的運(yùn)行狀態(tài),包括 CPU 使用率、內(nèi)存使用情況、硬盤(pán)空間、網(wǎng)絡(luò)連接等。如果監(jiān)控器發(fā)現(xiàn)系統(tǒng)出現(xiàn)異常或故障,就會(huì)觸發(fā)看門狗的保護(hù)機(jī)制,采取相應(yīng)措施,如自動(dòng)重啟系統(tǒng)或向管理員發(fā)送警報(bào)信息。定時(shí)器:定時(shí)器是看門狗的另一個(gè)重要組成部分,它會(huì)在系統(tǒng)啟動(dòng)時(shí)開(kāi)始計(jì)時(shí),當(dāng)計(jì)時(shí)器超時(shí)時(shí),就會(huì)觸發(fā)看門狗的保護(hù)機(jī)制。超時(shí)時(shí)間一般是由系統(tǒng)管理員或開(kāi)發(fā)人員根據(jù)實(shí)際需要設(shè)置的,通常為幾秒鐘到幾分鐘不等。
-
IO(輸入輸出)。
I是input,輸入;O是out, 輸出。輸入就像是接受端。你給我電,單片機(jī)就會(huì)知道,輸入端是1,你不給我電,輸入端是0。輸出是,設(shè)定這個(gè)腳為輸出,讀取這個(gè)腳的狀態(tài)值的話,1為高電壓,0為低電平。輸出一般是驅(qū)動(dòng)一個(gè)小東西,再帶動(dòng)一個(gè)大裝置來(lái)達(dá)到自己想要的要求。你可以看做一個(gè)電源。能給你的東西供電。就像電源不會(huì)隨你會(huì)接的東西影響,它始終都是電源。只是有狀態(tài),有電、沒(méi)電。
-
Autisar.汽車開(kāi)放系統(tǒng)架構(gòu)。
Autisar內(nèi)部可以分為三大模塊:應(yīng)用層(Application)、中間層(RTE),底層(BSW)。
App:可以理解為某一功能的輸出,舉個(gè)例子:智駕功能通過(guò)一系列邏輯想要請(qǐng)求車輛打開(kāi)轉(zhuǎn)向燈(接下來(lái)會(huì)變道),那么應(yīng)用層就是把這個(gè)點(diǎn)轉(zhuǎn)向燈的請(qǐng)求發(fā)出去。
RTE:很有邏輯技巧的一層,可以理解成底層與應(yīng)用層的匹配、連接層,為了各項(xiàng)命令更更高效的分配!可以理解成整車GW網(wǎng)關(guān)。
BSW:提供了一些基礎(chǔ)軟件模塊,包括通信協(xié)議、診斷協(xié)議、內(nèi)存管理、定時(shí)器等,以支持運(yùn)行時(shí)環(huán)境層和應(yīng)用層的功能實(shí)現(xiàn)。基礎(chǔ)軟件層的主要任務(wù)是提供可重用性和互操作性。

-
串行/并行。
這里可以理解為數(shù)據(jù)傳輸?shù)膬煞N類型。一種是字節(jié)依次傳輸,one by one,一種是可以多個(gè)字節(jié)進(jìn)行打包后再傳輸。前者即為串行傳輸,后者為并行傳輸,很明顯后者傳輸速率更快。
-
CAN總線傳輸仲裁邏輯。
數(shù)據(jù)在CAN上傳輸時(shí),是以高低電平進(jìn)行仲裁的,仲裁結(jié)果優(yōu)先則先傳輸。即報(bào)文的優(yōu)先級(jí),是通過(guò)對(duì) ID 的仲裁來(lái)確定的。CAN總線上有兩種電平狀態(tài),如果總線上同時(shí)出現(xiàn)顯性電平和隱性電平,總線的狀態(tài)會(huì)被置為顯性電平,CAN正是利用這個(gè)特性進(jìn)行仲裁。且是以低電平為優(yōu)先。
下面找了份示意圖,供各位參考。
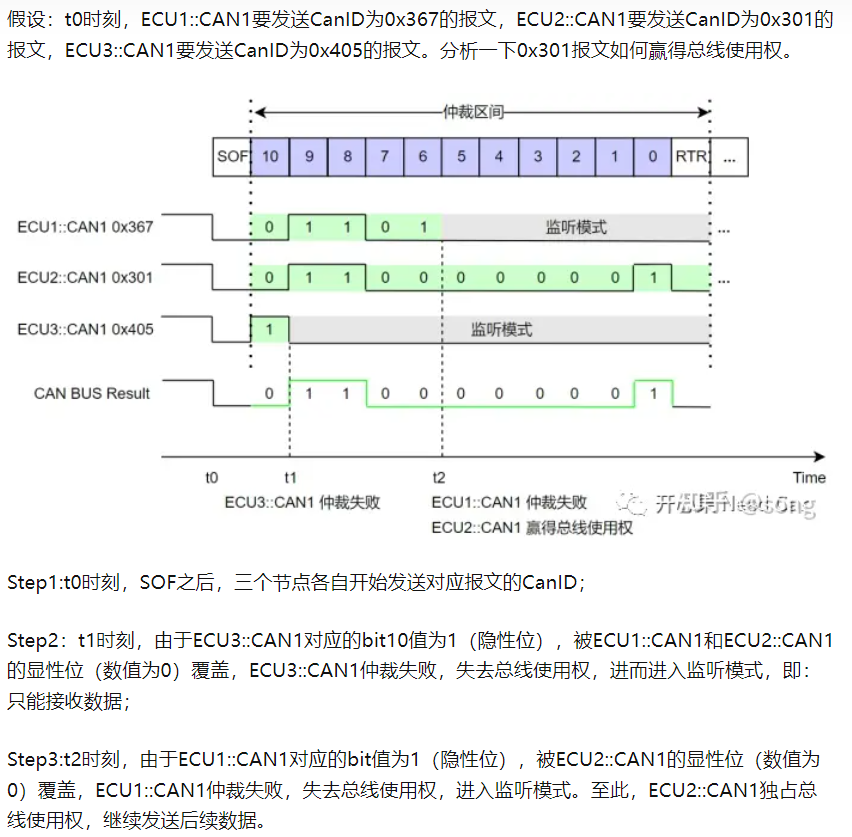
核心思想:前面的0越多,優(yōu)先級(jí)越高。

關(guān)注《無(wú)人駕駛俱樂(lè)部》,讓你更懂汽車無(wú)人駕駛技術(shù)!
END
往期精彩推薦
-
車路協(xié)同: 物聯(lián)網(wǎng)V2X技術(shù)—智能駕駛的又一次偉大變革!
后臺(tái)回復(fù)關(guān)鍵字:
?回復(fù) “ V2X ” :查看V2X兩大技術(shù)標(biāo)準(zhǔn):DSRC與LTE V2X詳細(xì)對(duì)比資料;
?回復(fù) “精美壁紙 ” :獲取蘭博基尼·汽車精美壁紙一套;
還有更多汽車無(wú)人駕駛領(lǐng)域資料、資源等,敬請(qǐng)期待!
歡迎加入《無(wú)人駕駛俱樂(lè)部》! 2023: 共同學(xué)習(xí)、共同進(jìn)步、共同發(fā)展。 智能駕駛ADAS,V2X, 感知融合!