
數(shù)字圖像處理知識(shí)點(diǎn)總結(jié)
點(diǎn)擊上方“小白學(xué)視覺(jué)”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)
本文轉(zhuǎn)自|新機(jī)器視覺(jué)

數(shù)字圖像處理知識(shí)點(diǎn)總結(jié)
1. 圖像:對(duì)客觀對(duì)象的一種相似性的生動(dòng)性的描述或?qū)懻妗?/span>
2. 圖像分類:按可見(jiàn)性(可見(jiàn)圖像、不可見(jiàn)圖像),按波段數(shù)(單波段、多波段、超波段),按空間坐標(biāo)和亮度的連續(xù)性(模擬和數(shù)字)。
3. 圖像處理:對(duì)圖像進(jìn)行一系列操作,以到達(dá)預(yù)期目的的技術(shù)。
4. 圖像處理三個(gè)層次:狹義圖像處理、圖像分析和圖像理解。
5. 圖像處理五個(gè)模塊:采集、顯示、存儲(chǔ)、通信、處理和分析。
6. 模擬圖像的表示:f(x,y)=i(x,y)×r(x,y),照度分量0< i(x,y)< ∞ ,反射分量0 <r(x,y)<1.
7. 圖像數(shù)字化:將一幅畫(huà)面轉(zhuǎn)化成計(jì)算機(jī)能處理的形式——數(shù)字圖像的過(guò)程。它包括采樣和量化兩個(gè)過(guò)程。像素的位置和灰度就是像素的屬性。
8. 將空間上連續(xù)的圖像變換成離散點(diǎn)的操作稱為采樣。采樣間隔和采樣孔徑的大小是兩個(gè)很重要的參數(shù)。采樣方式:有縫、無(wú)縫和重疊。
9. 將像素灰度轉(zhuǎn)換成離散的整數(shù)值的過(guò)程叫量化。
10. 表示像素明暗程度的整數(shù)稱為像素的灰度級(jí)(或灰度值或灰度)。
11. 數(shù)字圖像根據(jù)灰度級(jí)數(shù)的差異可分為:黑白圖像、灰度圖像和彩色圖像。
12. 采樣間隔對(duì)圖像質(zhì)量的影響:一般來(lái)說(shuō),采樣間隔越大,所得圖像像素?cái)?shù)越少,空間分辨率低,質(zhì)量差,嚴(yán)重時(shí)出現(xiàn)像素呈塊狀的國(guó)際棋盤(pán)效應(yīng);采樣間隔越小,所得圖像像素?cái)?shù)越多,空間分辨率高,圖像質(zhì)量好,但數(shù)據(jù)量大。
13. 量化等級(jí)對(duì)圖像質(zhì)量的影響:量化等級(jí)越多,所得圖像層次越豐富,灰度分辨率高,圖像質(zhì)量好,但數(shù)據(jù)量大;量化等級(jí)越少,圖像層次欠豐富,灰度分辨率低,會(huì)出現(xiàn)假輪廓現(xiàn)象,圖像質(zhì)量變差,但數(shù)據(jù)量小。但在極少數(shù)情況下對(duì)固定圖像大小時(shí),減少灰度級(jí)能改善質(zhì)量,產(chǎn)生這種情況的最可能原因是減少灰度級(jí)一般會(huì)增加圖像的對(duì)比度。例如對(duì)細(xì)節(jié)比較豐富的圖像數(shù)字化。
14. 數(shù)字化器組成:
1) 采樣孔:保證單獨(dú)觀測(cè)特定的像素而不受其它部分的影響。
2) 圖像掃描機(jī)構(gòu):使采樣孔按預(yù)先確定的方式在圖像上移動(dòng)。
3) 光傳感器:通過(guò)采樣孔測(cè)量圖像的每一個(gè)像素的亮度。
4) 量化器:將傳感器輸出的連續(xù)量轉(zhuǎn)化為整數(shù)值。
5) 輸出存儲(chǔ)體:將像素灰度值存儲(chǔ)起來(lái)。它可以是固態(tài)存儲(chǔ)器,或磁盤(pán)等。
15. 灰度直方圖反映的是一幅圖像中各灰度級(jí)像素出現(xiàn)的頻率。以灰度級(jí)為橫坐標(biāo),縱坐標(biāo)為灰度級(jí)的頻率,繪制頻率同灰度級(jí)的關(guān)系圖就是灰度直方圖。
16. 直方圖的性質(zhì):
1) 灰度直方圖只能反映圖像的灰度分布情況,而不能反映圖像像素的位置,即丟失了像素的位置信息。
2) 一幅圖像對(duì)應(yīng)唯一的灰度直方圖,反之不成立。不同的圖像可對(duì)應(yīng)相同的直方圖
3) 一幅圖像分成多個(gè)區(qū)域,多個(gè)區(qū)域的直方圖之和即為原圖像的直方圖。
17. 直方圖的應(yīng)用:
1) 用于判斷圖像量化是否恰當(dāng)
2) 用于確定圖像二值化的閾值
3) 計(jì)算圖像中物體的面積
4) 計(jì)算圖像信息量:熵H
18. 圖像處理基本功能的形式:單幅圖像 → 單幅圖像 ,多幅圖像 →單幅圖像,單(或多)幅圖像→數(shù)字或符號(hào)。
19. 鄰域:對(duì)于任一像素(i,j),該像素周?chē)南袼貥?gòu)成的集合{(i+p,j+q),p、q取合適的整數(shù)},叫做該像素的鄰域。
20. 圖像處理的幾種具體算法:
1) 局部處理:移動(dòng)平均平滑、空間域銳化。
2) 點(diǎn)處理:圖像對(duì)比度增強(qiáng)、圖像二值化。
3) 大局處理:傅里葉變換。
4) 迭代處理:細(xì)化。
5) 跟蹤處理
6) 位置不變處理和位置可變處理:輸出像素JP(i,j)的值的計(jì)算方法與像素的位置(i,j)無(wú)關(guān)的處理稱為位置不變處理或位移不變處理
7) 窗口處理和模板處理。
21. 圖像的數(shù)據(jù)結(jié)構(gòu)與特征 :
1) 組合方式:一個(gè)字長(zhǎng)存放多個(gè)像素灰度值的方式。它能起到節(jié)省內(nèi)存的作用,但導(dǎo)致計(jì)算量增加,使處理程序復(fù)雜。
2) 比特面方式:按比特位存取像素,即將所有像素的相同比特位用一個(gè)二維數(shù)組表示,形成比特面。
3) 分層結(jié)構(gòu):由原始圖像開(kāi)始依次構(gòu)成像素?cái)?shù)愈來(lái)愈少的一幅幅圖像,就能使數(shù)據(jù)表示具有分層性,其代表有錐形(金字塔)結(jié)構(gòu)。
4) 樹(shù)結(jié)構(gòu):對(duì)于一幅二值圖像的行、列接連不斷地二等分,如果圖像被分割部分中的全體像素都變成具有相同的特征時(shí),這一部分則不再分割
5) 多重圖像數(shù)據(jù)存儲(chǔ):逐波段存儲(chǔ),分波段處理時(shí)采用;逐行存儲(chǔ),行掃描記錄設(shè)備采用;逐像素存儲(chǔ),用于分類。
22. 圖像的特征:
1) 自然特征:光譜特征、幾何特征、時(shí)相特征;
2) 人工特征:直方圖特征,灰度邊緣特征,線、角點(diǎn)、紋理特征;
3) 特征的范圍:點(diǎn)特征、局部特征、區(qū)域特征、整體特征。
4) 特征提取:獲取圖像特征信息的操作。把從圖像提取的m個(gè)特征量y1,y2,…,ym,用m維的向量Y=[y1 y2…ym]t表示稱為特征向量。另外,對(duì)應(yīng)于各特征量的m維空間叫做特征空間。
23. 對(duì)比度:一幅圖像中灰度反差的大小,對(duì)比度=最大亮度/最小亮度
24. 圖像變換通常是一種二維正交變換。
1) 正交變換必須是可逆的;
2) 正變換和反變換的算法不能太復(fù)雜;
3) 正交變換的特點(diǎn)是在變換域中圖像能量集中分布在低頻率成分上,邊緣、線狀信息反映在高頻率成分上,有利于圖象處理。
25. 圖像變換的目的在于:
1) 使圖像處理問(wèn)題簡(jiǎn)化;
2) 有利于圖像特征提取;
3) 有助于從概念上增強(qiáng)對(duì)圖像信息的理解。
26. 圖像增強(qiáng)是采用一系列技術(shù)去改善圖像的視覺(jué)效果,或?qū)D像轉(zhuǎn)換成一種更適合于人或機(jī)器進(jìn)行分析和處理的形式。
27. 空間域增強(qiáng)是直接對(duì)圖像各像素進(jìn)行處理;
28. 頻率域增強(qiáng)是先將圖像經(jīng)傅立葉變換后的頻譜成分進(jìn)行某種處理,然后經(jīng)逆傅立葉變換獲得所需的圖像。
29.
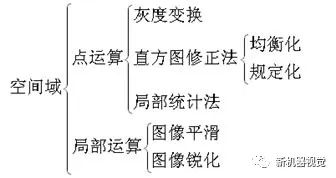
30. 灰度變換用來(lái)調(diào)整圖像的灰度動(dòng)態(tài)范圍或圖像對(duì)比度,是圖像增強(qiáng)的重要手段之一。
1) 線性變換:對(duì)圖像每一個(gè)像素灰度作線性拉伸,將有效改善圖像視覺(jué)效果。
2) 分段線性變換:為了突出感興趣目標(biāo)所在的灰度區(qū)間,相對(duì)抑制那些不感興趣的灰度區(qū)間,可采用分段線性變換。
3) 非線性灰度變換:對(duì)數(shù)變換(當(dāng)希望對(duì)圖像的低灰度區(qū)較大的拉伸而對(duì)高灰度區(qū)壓縮時(shí),可采用這種變換,它能使圖像灰度分布與人的視覺(jué)特性相匹配)。 指數(shù)變換(對(duì)圖像的高灰度區(qū)給予較大的拉伸)
31. 直方圖修整法包括直方圖均衡化及直方圖規(guī)定化兩類。
32. 直方圖均衡化:將原圖像通過(guò)某種變換,得到一幅灰度直方圖為均勻分布的新圖像的方法。
33. 直方圖均衡化變換函數(shù),滿足下列條件:
1) 在0≤r≤1內(nèi)為單調(diào)遞增函數(shù),保證灰度級(jí)從黑到白的次序不變;
2) 在0≤r≤1內(nèi),有0≤T(r)≤1,確保映射后的像素灰度在允許的范圍內(nèi)。
34. 直方圖均衡化原理:輸出圖像的概率密度函數(shù)可以通過(guò)變換函數(shù)T(r)控制原圖像灰度級(jí)的概率密度函數(shù)得到,并改善原圖像的灰度層次。
35. 一幅圖像的sk與rk之間的關(guān)系稱為該圖像的累積灰度直方圖。
36. 直方圖規(guī)定化是使原圖像灰度直方圖變成規(guī)定形狀的直方圖而對(duì)圖像作修正的增強(qiáng)方法。
37. 利用直方圖規(guī)定化方法進(jìn)行圖像增強(qiáng)的主要困難在于要構(gòu)成有意義的直方圖。圖像經(jīng)直方圖規(guī)定化,其增強(qiáng)效果要有利于人的視覺(jué)判讀或便于機(jī)器識(shí)別。
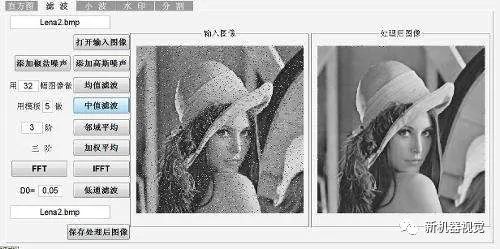
38. 為了抑制噪聲改善圖像質(zhì)量所進(jìn)行的處理稱圖像平滑或去噪。
39. 用鄰域內(nèi)各像素的灰度平均值代替該像素原來(lái)的灰度值,實(shí)現(xiàn)圖像的平滑,又稱鄰域平均法。
40. 超限像素平滑法:將f(x,y)和鄰域平均g(x,y)差的絕對(duì)值與選定的閾值進(jìn)行比較,根據(jù)比較結(jié)果決定點(diǎn)(x,y)的最后灰度g′(x,y)。
41. 灰度最相近的K個(gè)鄰點(diǎn)平均法:可用窗口內(nèi)與中心像素的灰度最接近的K個(gè)鄰像素的平均灰度來(lái)代替窗口中心像素的灰度值。
42. 最大均勻性平滑:為避免消除噪聲引起邊緣模糊,該算法先找出環(huán)繞圖像中每像素的最均勻區(qū)域,然后用這區(qū)域的灰度均值代替該像素原來(lái)的灰度值。具體可選任一像素(x,y)的5個(gè)有重疊的3*3鄰域,用梯度衡量它們灰度變化的大小。
43. 有選擇保邊緣平滑法:對(duì)圖像上任一像素(x,y)的5×5鄰域,采用9個(gè)掩模:一個(gè)3×3正方形、4個(gè)五邊形和4個(gè)六邊形。計(jì)算各個(gè)掩模的均值和方差,對(duì)方差進(jìn)行排序,最小方差所對(duì)應(yīng)的掩模的灰度均值就是像素(x,y) 的輸出值。
44. 空間低通濾波法:應(yīng)用模板卷積方法對(duì)圖像每一像素進(jìn)行局部處理。不管什么樣的掩模,必須保證全部權(quán)系數(shù)之和為單位值,這樣可保證輸出圖像灰度值在許可范圍內(nèi),不會(huì)產(chǎn)生“溢出”現(xiàn)象。
45. 中值濾波:是對(duì)一個(gè)滑動(dòng)窗口內(nèi)的諸像素灰度值排序,用中值代替窗口中心像素的原來(lái)灰度值,因此它是一種非線性的圖像平滑法。離散階躍信號(hào)、斜升信號(hào)沒(méi)有受到影響。離散三角信號(hào)的頂部則變平了。對(duì)于離散的脈沖信號(hào),當(dāng)其連續(xù)出現(xiàn)的次數(shù)小于窗口尺寸的一半時(shí),將被抑制掉,否則將不受影響。
46. 各種空間域平滑算法效果比較:
1) 局部平滑法算法簡(jiǎn)單,但它的主要缺點(diǎn)是在降低噪聲的同時(shí)使圖像產(chǎn)生模糊,特別在邊緣和細(xì)節(jié)處。而且鄰域越大,在去噪能力增強(qiáng)的同時(shí)模糊程度越嚴(yán)重。
2) 超限像素平滑法對(duì)抑制椒鹽噪聲比較有效,對(duì)保護(hù)僅有微小灰度差的細(xì)節(jié)及紋理也有效。并且隨著鄰域增大,去噪能力增強(qiáng),但模糊程度也大。超限像元平滑法比局部平滑法去椒鹽噪聲效果更好。
3) 灰度最相近的K個(gè)鄰點(diǎn)平均法:較小的K值使噪聲方差下降較小,但保持細(xì)節(jié)效果較好;而較大的K值平滑噪聲較好,但會(huì)使圖像邊緣模糊。
4) 最大均勻性平滑經(jīng)多次迭代可增強(qiáng)平滑效果,在消除圖像噪聲的同時(shí)保持邊緣清晰性。但對(duì)復(fù)雜形狀的邊界會(huì)過(guò)分平滑并使細(xì)節(jié)消失。
5) 有選擇保邊緣平滑法既能夠消除噪聲,又不破壞區(qū)域邊界的細(xì)節(jié)。
6) 中值濾波對(duì)脈沖干擾及椒鹽噪聲的抑制效果好,在抑制隨機(jī)噪聲的同時(shí)能有效保護(hù)邊緣少受模糊。但它對(duì)點(diǎn)、線等細(xì)節(jié)較多的圖像卻不太合適。中值濾波法能有效削弱椒鹽噪聲,且比鄰域、超限像素平均法更有效。
47. 圖像空間域銳化增強(qiáng)圖像的邊緣或輪廓。
48. 圖像平滑通過(guò)積分過(guò)程使得圖像邊緣模糊,圖像銳化則通過(guò)微分而使圖像邊緣突出、清晰。
49. 梯度銳化法:梯度為grad(x,y)=Max(|fx′|,|fy′|) 或grad(x,y)=|fx’|+|fy′|。有梯度算子、Roberts、Prewitt和Sobel 算子計(jì)算梯度,來(lái)增強(qiáng)邊緣。
50. Laplacian增強(qiáng)算子:g(x,y)=f(x,y)- ▽2f(x,y)=5f(x,y)-[f(x+1,y)+ f(x-1,y)+f(x,y+1)+ f(x,y-1)]
51. Laplacian增強(qiáng)算子特點(diǎn):
1) 在灰度均勻的區(qū)域或斜坡中間▽2f(x,y)為0,增強(qiáng)圖像上像元灰度不變;
2) 在斜坡底或低灰度側(cè)形成“下沖”;而在斜坡頂或高灰度側(cè)形成“上沖”
52. 高通濾波法就是用高通濾波算子和圖像卷積來(lái)增強(qiáng)邊緣。
53. 頻率域平滑:由于噪聲主要集中在高頻部分,為去除噪聲改善圖像質(zhì)量,濾波器采用低通濾波器H(u,v)來(lái)抑制高頻成分,通過(guò)低頻成分,然后再進(jìn)行逆傅立葉變換獲得濾波圖像,就可達(dá)到平滑圖像的目的:
54. 頻率域低濾波器H(u,v)有四種:理想低通濾波器、Butterworth低通濾波器、指數(shù)低通濾波器、. 梯形低通濾波器。
55. 各種濾波器效果比較;
1) 理想低通濾波器:在去噪聲的同時(shí)將會(huì)導(dǎo)致邊緣信息損失而使圖像邊模糊,并產(chǎn)生振鈴效應(yīng)。
2) Butterworth低通濾波器的特性是連續(xù)性衰減,而不象理想濾波器那樣陡峭變化,即明顯的不連續(xù)性。因此采用該濾波器濾波在抑制噪聲的同時(shí),圖像邊緣的模糊程度大大減小,沒(méi)有振鈴效應(yīng)產(chǎn)生。
3) 指數(shù)低通濾波器:圖像邊緣的模糊程度較用Butterworth濾波產(chǎn)生的大些,無(wú)明顯的振鈴效應(yīng)。
4) 梯形低通濾波器的性能介于理想低通濾波器和指數(shù)濾波器之間,濾波的圖像有一定的模糊和振鈴效應(yīng)。
56. 頻率域銳化:采用高通濾波器讓高頻成分通過(guò),使低頻成分削弱,再經(jīng)逆傅立葉變換得到邊緣銳化的圖像。包括:理想高通濾波器、巴特沃斯高通濾波器、指數(shù)濾波器、梯形濾波器。
57. 彩色增強(qiáng)技術(shù)是利用人眼的視覺(jué)特性,將灰度圖像變成彩色圖像或改變彩色圖像已有彩色的分布,改善圖像的可分辨性。彩色增強(qiáng)方法可分為偽彩色增強(qiáng)和假彩色增強(qiáng)兩類。
58. 偽彩色增強(qiáng)是把黑白圖像的各個(gè)不同灰度級(jí)按照線性或非線性的映射函數(shù)變換成不同的彩色,得到一幅彩色圖像的技術(shù)。
59. 偽彩色增強(qiáng)的方法主要有密度分割法、和頻率域偽彩色增強(qiáng)三種。
60. 密度分割法是把黑白圖像的灰度級(jí)從0(黑)到M0(白)分成N個(gè)區(qū)間Ii(i=1,2,…,N),給每個(gè)區(qū)間Ii指定一種彩色Ci,這樣,便可以把一幅灰度圖像變成一幅偽彩色圖像。
61. 灰度級(jí)一彩色變換將原圖像f(x,y)的灰度范圍分段,經(jīng)過(guò)紅、綠、藍(lán)三種不同變換TR(?)、TG(?)和TB(?),變成三基色分量IR(x,y)、IG(x,y)、IB(x,y),然后用它們分別去控制彩色顯示器的紅、綠、藍(lán)電子槍,便可以在彩色顯示器的屏幕上合成一幅彩色圖像。
62. 密度分割法比較簡(jiǎn)單、直觀。缺點(diǎn)是變換出的彩色數(shù)目有限。
63. 假彩色增強(qiáng)是對(duì)一幅自然彩色圖像或同一景物的多光譜圖像,通過(guò)映射函數(shù)變換成新的三基色分量,彩色合成使感興趣目標(biāo)呈現(xiàn)出與原圖像中不同的、奇異的彩色。
64. 假彩色增強(qiáng)目的:
1) 使感興趣的目標(biāo)呈現(xiàn)奇異的彩色或置于奇特的彩色環(huán)境中,從而更引人注目;
2) 使景物呈現(xiàn)出與人眼色覺(jué)相匹配的顏色,以提高對(duì)目標(biāo)的分辨力。
65. 偽彩色增強(qiáng)與假彩色增強(qiáng)有何區(qū)別:偽彩色處理主要解決的是如何把灰度圖變成偽彩色圖的問(wèn)題,最簡(jiǎn)單的辦法是選擇對(duì)應(yīng)于某一灰度值設(shè)一彩色值來(lái)替代,可稱之為調(diào)色板替代法.另外一種比較好的偽彩色處理方法是設(shè)定三個(gè)獨(dú)立的函數(shù) ,給出一個(gè)灰度值,便由計(jì)算機(jī)估算出一個(gè)相應(yīng)的RGB值. 假彩色(false color)處理是把真實(shí)的自然彩色圖像或遙感多光譜圖象處理成假彩色圖像.假彩色處理的主要用途是:
(1)景物映射成奇異彩色,比本色更引人注目.
(2)適應(yīng)人眼對(duì)顏色的靈敏度,提高鑒別能力.可把細(xì)節(jié)豐富的物體映射成深淺與亮度不一的顏色.
(3)遙感多光譜圖象處理成假彩色,可以獲得更多信息.
66. 像素級(jí)影像融合是采用某種算法將覆蓋同一地區(qū)(或?qū)ο螅┑膬煞蚨喾臻g配準(zhǔn)的影像生成滿足某種要求的影像的技術(shù)。
67. 顏色可以用R、G、B三分量來(lái)表示,也可以用亮度(I)、色別(H)和飽和度(S)來(lái)表示,它們稱為顏色的三要素。把彩色的R、G、B變換成I、H、S稱為HIS正變換,而由I、H、S變換成R、G、B稱為HIS反變換。
第五章 圖像復(fù)原與重建
68. 圖像的退化是指圖像在形成、傳輸和記錄過(guò)程中,由于成像系統(tǒng)、傳輸介質(zhì)和設(shè)備的不完善,使圖像的質(zhì)量變壞。
69. 圖像復(fù)原就是要盡可能恢復(fù)退化圖像的本來(lái)面目,它是沿圖像退化的逆過(guò)程進(jìn)行處理。
70. 圖像復(fù)原過(guò)程如下:找退化原因→建立退化模型→反向推演→恢復(fù)圖像
71. 圖像復(fù)原和圖像增強(qiáng)的區(qū)別:
1) 圖像增強(qiáng)不考慮圖像是如何退化的,而是試圖采用各種技術(shù)來(lái)增強(qiáng)圖像的視覺(jué)效果。因此,圖像增強(qiáng)可以不顧增強(qiáng)后的圖像是否失真,只要看得舒服就行。
2) 而圖像復(fù)原就完全不同,需知道圖像退化的機(jī)制和過(guò)程等先驗(yàn)知識(shí),據(jù)此找出一種相應(yīng)的逆處理方法,從而得到復(fù)原的圖像。
3) 如果圖像已退化,應(yīng)先作復(fù)原處理,再作增強(qiáng)處理。
4) 二者的目的都是為了改善圖像的質(zhì)量。
72. 點(diǎn)源的概念:一幅圖像可以看成由無(wú)窮多極小的像素所組成,每一個(gè)像素都可以看作為一個(gè)點(diǎn)源成像,因此,一幅圖像也可以看成由無(wú)窮多點(diǎn)源形成的。
73. 當(dāng)輸入的單位脈沖函數(shù)延遲了α、β單位,即當(dāng)輸入為δ(x –α, y –β)時(shí),如果輸出為h(x –α, y –β),則稱此系統(tǒng)為位移不變系統(tǒng)。
74. 線性位移不變系統(tǒng)的輸出等于系統(tǒng)的輸入和系統(tǒng)脈沖響應(yīng)(點(diǎn)擴(kuò)散函數(shù))的卷積。即:g(x,y)=f(x,y)*h(x,y)。
75. 圖像退化的數(shù)學(xué)模型: g(x,y)= f(x,y)* h(x,y)+ n(x,y)
76. 采用線性位移不變系統(tǒng)模型的原由:
1)由于許多種退化都可以用線性位移不變模型來(lái)近似,這樣線性系統(tǒng)中的許多數(shù)學(xué)工具如線性代數(shù),能用于求解圖像復(fù)原問(wèn)題,從而使運(yùn)算方法簡(jiǎn)捷和快速。
2)當(dāng)退化不太嚴(yán)重時(shí),一般用線性位移不變系統(tǒng)模型來(lái)復(fù)原圖像,在很多應(yīng)用中有較好的復(fù)原結(jié)果,且計(jì)算大為簡(jiǎn)化。
3)盡管實(shí)際非線性和位移可變的情況能更加準(zhǔn)確而普遍地反映圖像復(fù)原問(wèn)題的本質(zhì),但在數(shù)學(xué)上求解困難。只有在要求很精確的情況下才用位移可變的模型去求解,其求解也常以位移不變的解法為基礎(chǔ)加以修改而成。
77. 頻率域恢復(fù)方法應(yīng)注意:若噪聲存在,而且H(u,v)很小或?yàn)榱銜r(shí),則噪聲被放大。這意味著退化圖像中小噪聲的干擾在H(u,v)較小時(shí),會(huì)對(duì)逆濾波恢復(fù)的圖像產(chǎn)生很大的影響,有可能使恢復(fù)的圖像和f(x,y)相差很大,甚至面目全非。
78. 圖像在獲取過(guò)程中,由于成像系統(tǒng)本身具有非線性、拍攝角度等因素的影響,會(huì)使獲得的圖像產(chǎn)生幾何失真,可分為:系統(tǒng)失真和非系統(tǒng)是真。系統(tǒng)失真是有規(guī)律的、能預(yù)測(cè)的;非系統(tǒng)失真則是隨機(jī)的。
79. 對(duì)圖像進(jìn)行幾何校正的必要性:當(dāng)對(duì)圖像作定量分析時(shí),就要對(duì)失真的圖像先進(jìn)行精確的幾何校正(即將存在幾何失真的圖像校正成無(wú)幾何失真的圖像),以免影響定量分析的精度。
80. 幾何校正分兩步:
1) 圖像空間坐標(biāo)變換;首先建立圖像像點(diǎn)坐標(biāo)(行、列號(hào))和物方(或參考圖)對(duì)應(yīng)點(diǎn)坐標(biāo)間的映射關(guān)系,解求映射關(guān)系中的未知參數(shù),然后根據(jù)映射關(guān)系對(duì)圖像各個(gè)像素坐標(biāo)進(jìn)行校正;
2) 確定各像素的灰度值(灰度內(nèi)插)
81. 圖像空間坐標(biāo)變換當(dāng)n=1時(shí),畸變關(guān)系為線性變換,式子中包含a00、a10、a01 、b00、b10、b016個(gè)未知數(shù),至少需要3個(gè)已知點(diǎn)來(lái)建立方程式,解求未知數(shù)。當(dāng)n=2時(shí),畸變關(guān)系式包含12個(gè)未知數(shù),至少需要6個(gè)已知點(diǎn)來(lái)建立關(guān)系式,解求未知數(shù)。
82. 幾何校正方法可分為直接法和間接法兩種。
83. 常用的像素灰度內(nèi)插法有最近鄰元法、雙線性內(nèi)插法和三次內(nèi)插法三種。
84. 像素灰度內(nèi)插法效果比較:
1) 最近鄰內(nèi)插:最簡(jiǎn)單,效果尚佳,但校正后的圖像邊緣有明顯鋸齒狀,即存在灰度不連續(xù)性。
2) 雙線性內(nèi)插法:較復(fù)雜,計(jì)算量較大,沒(méi)有灰度不連續(xù)性的缺點(diǎn),結(jié)果令人滿意。但它具有低通濾波性質(zhì),使高頻分量受損,圖像輪廓有一定模糊。
3) 三次內(nèi)插:計(jì)算量最大,但內(nèi)插效果最好,精度最高。
85. 圖像重建有三種模型:透射模型、發(fā)射模型和反射模型。
86. 透射模型建立于能量通過(guò)物體后有一部分能量會(huì)被吸收的基礎(chǔ)之上,透射模型經(jīng)常用于X射線、電子射線及光線和熱輻射的情況下,它們都遵從一定的吸收規(guī)則。
87. 發(fā)射模型可用來(lái)確定物體的位置。這種方法已經(jīng)廣泛用于正電子檢測(cè),通過(guò)在相反的方向分解散射的兩束伽馬射線,則這兩束射線的渡越時(shí)間可用來(lái)確定物體的位置。
88. 反射模型可以用來(lái)測(cè)定物體的表面特征,例如光線、電子束、激光或超聲波等都可以用來(lái)進(jìn)行這種測(cè)定。
89. 從多個(gè)斷面恢復(fù)三維形狀的方法有Voxel 法(體素法)、分塊的平面近似法。
第六章 圖像編碼與壓縮
90. 數(shù)據(jù)壓縮的研究?jī)?nèi)容包括數(shù)據(jù)的表示、傳輸、變換和編碼方法,目的是減少存儲(chǔ)數(shù)據(jù)所需的空間和傳輸所用的時(shí)間。
91. 圖像編碼與壓縮就是對(duì)圖像數(shù)據(jù)按一定的規(guī)則進(jìn)行變換和組合,達(dá)到以盡可能少的代碼(符號(hào))來(lái)表示盡可能多的圖像信息。
92. 冗余數(shù)據(jù)有:編碼冗余、像素間冗余、心理視覺(jué)冗余3種。
93. 根據(jù)解壓重建后的圖像和原始圖像之間是否具有誤差,圖像編碼壓縮分為無(wú)誤差(亦稱無(wú)失真、無(wú)損、信息保持)編碼和有誤差(有失真或有損)編碼兩大類。
94. 根據(jù)編碼作用域劃分,圖像編碼為空間域編碼和變換域編碼兩大類。
95. 描述解碼圖像相對(duì)原始圖像偏離程度的測(cè)度一般稱為保真度,可分為兩大類:客觀保真度準(zhǔn)則和主觀保真度準(zhǔn)則。
96. 最常用的客觀保真度準(zhǔn)則是原圖像和解碼圖像之間的均方根誤差和均方根信噪比兩種。
97. 理論上最佳信息保持編碼的平均碼長(zhǎng)可以無(wú)限接近圖像信息熵H。但總是大于或等于圖像的熵H。
98. 霍夫曼編碼:在信源數(shù)據(jù)中出現(xiàn)概率越大的符號(hào),編碼以后相應(yīng)的碼長(zhǎng)越短;出現(xiàn)概率越小的符號(hào),其碼長(zhǎng)越長(zhǎng),從而達(dá)到用盡可能少的碼符表示信源數(shù)據(jù)。它在無(wú)損變長(zhǎng)編碼方法中是最佳的。
99. 行程編碼的基本原理:將一行中顏色值相同的相鄰像素用一個(gè)計(jì)數(shù)值和該顏色值來(lái)代替。
100.一維行程編碼只考慮了消除行內(nèi)像素間的相關(guān)性.沒(méi)有考慮其它方向的相關(guān)性.
101.二維行程編碼就是利用圖像二維信息的強(qiáng)相關(guān)性,按照一定的掃描路徑遍歷所有的像素形成一維的序列,然后對(duì)序列進(jìn)行一維行程編碼的方法。
102.混合編碼:既具有行程編碼的性質(zhì)又是變長(zhǎng)編碼。
第七章 圖像分割
103.圖像分析:對(duì)圖像中感興趣的目標(biāo)進(jìn)行檢測(cè)和測(cè)量,以獲得它們的客觀信息,從而建立對(duì)圖像的描述.
104.圖像分割:把圖像分成互不重疊的區(qū)域并提取感興趣目標(biāo)的技術(shù)。
105.記憶圖像分割所需滿足的五個(gè)條件。
106.分割算法基于灰度值的兩個(gè)基本特性:不連續(xù)性和相似性
107.檢測(cè)圖像像素灰度級(jí)的不連續(xù)性,找到點(diǎn)、線(寬度為1)、邊(不定寬度)。
108.檢測(cè)圖像像素的灰度值的相似性,通過(guò)選擇閾值,找到灰度值相似的區(qū)域,區(qū)域的外輪廓就是對(duì)象的邊。
109.圖像分割的方法:
1) 基于邊緣的分割方法:先提取區(qū)域邊界,再確定邊界限定的區(qū)域。
2) 區(qū)域分割:確定每個(gè)像素的歸屬區(qū)域,從而形成一個(gè)區(qū)域圖。
3) 區(qū)域生長(zhǎng):將屬性接近的連通像素聚集成區(qū)域
4) 分裂-合并分割:綜合利用前兩種方法,既存在圖像的劃分,又有圖像的合并。
110.邊緣:圖像中像素灰度有階躍變化或屋頂變化的那些像素的集合。
111.邊緣檢測(cè)算子:梯度算子、Roberts算子、Prewitt算子、Sobel算子、Kirsch算子(方向算子)、Laplacian算子、Marr算子。
112.邊緣檢測(cè)算子比較:
1) 梯度算子:僅計(jì)算相鄰像素的灰度差,對(duì)噪聲比較敏感,無(wú)法抑止噪聲的影響
2) Roberts算子:與梯度算子檢測(cè)邊緣的方法類似,對(duì)噪聲敏感,但效果較梯度算子略好
3) Prewitt算子:在檢測(cè)邊緣的同時(shí),能抑止噪聲的影響
4) Sobel算子:對(duì)4鄰域采用帶權(quán)方法計(jì)算差分;能進(jìn)一步抑止噪聲;但檢測(cè)的邊緣較寬
5) 方向算子:在計(jì)算邊緣強(qiáng)度的同時(shí)可以得到邊緣的方向;各方向間的夾角為45o
6) 拉普拉斯算子:優(yōu)點(diǎn),各向同性、線性和位移不變的;對(duì)細(xì)線和孤立點(diǎn)檢測(cè)效果較好。缺點(diǎn),對(duì)噪音的敏感,對(duì)噪聲有雙倍加強(qiáng)作用;不能檢測(cè)出邊的方向;常產(chǎn)生雙像素的邊緣。
7) Marr算子:σ的選擇很重要, σ小時(shí)邊緣位置精度高,但邊緣細(xì)節(jié)變化多;σ大時(shí)平滑作用大,但細(xì)節(jié)損失大,邊緣點(diǎn)定位精度低。應(yīng)根據(jù)噪聲水平和邊緣點(diǎn)定位精度要求適當(dāng)選取σ。
8) 曲面擬合法:其過(guò)程是求平均后再求差分,因而對(duì)噪聲有抑制作用。
113.由于梯度算子和Laplace算子都對(duì)噪聲敏感,因此一般在用它們檢測(cè)邊緣前要先對(duì)圖像進(jìn)行平滑。
114.曲面擬合法:用平面或高階曲面來(lái)擬合圖像中某一小區(qū)域的灰度表面,求這個(gè)擬合平面微分或二階微分檢測(cè)邊緣,可減少噪聲影響。其過(guò)程是求平均后再求差分,因而對(duì)噪聲有抑制作用。
115.邊緣跟蹤:將檢測(cè)的邊緣點(diǎn)連接成線就是邊緣跟蹤。
116.直角坐標(biāo)系中的一條直線對(duì)應(yīng)極坐標(biāo)系中的一點(diǎn),這種線到點(diǎn)的變換就是Hough變換
117.Hough變換特點(diǎn):
1) 對(duì)ρ、θ量化過(guò)粗,直線參數(shù)就不精確,過(guò)細(xì)則計(jì)算量增加。因此,對(duì)ρ、θ量化要兼顧參數(shù)量化精度和計(jì)算量。
2) Hough變換檢測(cè)直線的抗噪性能強(qiáng),能將斷開(kāi)的邊緣連接起來(lái)。
3) 此外Hough變換也可用來(lái)檢測(cè)曲線。
118.區(qū)域生長(zhǎng):?jiǎn)我恍汀①|(zhì)心型、混合型。
119.單一型:缺點(diǎn)是區(qū)域增長(zhǎng)的結(jié)果與起始像素有關(guān),起始位置不同則分割結(jié)果有差異。
120.區(qū)域分裂合并法無(wú)需預(yù)先指定種子點(diǎn),它按某種一致性準(zhǔn)則分裂或者合并區(qū)域.可以先進(jìn)行分裂運(yùn)算,然后再進(jìn)行合并運(yùn)算;也可以分裂和合并運(yùn)算同時(shí)進(jìn)行,經(jīng)過(guò)連續(xù)的分裂和合并,最后得到圖像的精確分割效果.
121.分裂合并法對(duì)分割復(fù)雜的場(chǎng)景圖像比較有效.
第八章 二值圖像處理與形狀分析
122.在二值圖像中,把互相連接的像素的集合匯集為一組,于是具有若干個(gè)0值的像素(0像素)和具有若干個(gè)1值的像素(1像素)的組就產(chǎn)生了。把這些組叫做連接成分。
123.二值圖像上改變一個(gè)像素的值后,整個(gè)圖像的連接性并不改變(各連接成分既不分離、不結(jié)合,孔也不產(chǎn)生、不消失),則這個(gè)像素是可刪除的。
124.孤立點(diǎn):B(p)= 1的像素p,在4/8鄰接的情況下,當(dāng)其4/8鄰接的像素全是0時(shí),像素p稱作孤立點(diǎn)。其連接數(shù)Nc(p)=0。
125.內(nèi)部點(diǎn):B(p)= 1的像素p,在4/8鄰接的情況下,當(dāng)其4/8鄰接的像素全是1時(shí),稱作內(nèi)部點(diǎn)。內(nèi)部點(diǎn)的連接數(shù)Nc(p)=0。
126.邊界點(diǎn):在B(p)= 1的像素中,把除了孤立點(diǎn)和內(nèi)部點(diǎn)以外的點(diǎn)叫做邊界點(diǎn)。邊界點(diǎn)的連接數(shù)屬于[1,4]。
1) 刪除點(diǎn)或端點(diǎn);
2) 連接點(diǎn);
3) 分支點(diǎn);
4) 交叉點(diǎn)。
127.為區(qū)分二值圖像中的連接成分,求得連接成分個(gè)數(shù),對(duì)屬于同一個(gè)1像素連接成分的所有像素分配相同的編號(hào),對(duì)不同的連接成分分配不同的編號(hào)的操作,叫做連接成分的標(biāo)記。
128.膨脹就是把連接成分的邊界擴(kuò)大一層的處理。
129.收縮則是把連接成分的邊界點(diǎn)去掉從而縮小一層的處理。
130.距離變換是求二值圖像中各1像素到0像素的最短距離的處理。
131. 在經(jīng)過(guò)距離變換得到的圖像中,最大值點(diǎn)的集合就形成骨架,即位于圖像中心部分的線像素的集合,也可以看作是圖形各內(nèi)接圓中心的集合。反映了原圖形的形狀。給定距離和骨架就能恢復(fù)該圖形,但恢復(fù)的圖形不能保證原始圖形的連接性。常用于圖形壓縮、提取圖形幅寬和形狀特征等。
132.細(xì)化是從二值圖像中提取線寬為1像素的中心線的操作。
133.為了求得區(qū)域間的連接關(guān)系,必須沿區(qū)域的邊界點(diǎn)跟蹤像素,稱之為邊界(或邊緣)跟蹤。
134.形狀分析是指用計(jì)算機(jī)圖像處理與分析系統(tǒng)對(duì)圖像中的諸目標(biāo)提取形狀特征,對(duì)圖像進(jìn)行識(shí)別和理解。
135.區(qū)域形狀特征的提取有三類方法:
1) 區(qū)域內(nèi)部(包括空間域和變換域)形狀特征提取;
2) 區(qū)域外部(包括空間域和變換域)形狀特征提取;
3) 利用圖像層次型數(shù)據(jù)結(jié)構(gòu),提取形狀特征。
136.拓?fù)涿枥L子:歐拉數(shù);凹凸性;區(qū)域的測(cè)量;區(qū)域的大小及形狀描述量(面積、周長(zhǎng)、圓形度)。
137.區(qū)域的拓?fù)湫再|(zhì)對(duì)區(qū)域的全局描述是很有用的,歐拉數(shù)是區(qū)域一個(gè)較好的描述子。
第九章 影像紋理分析
138.局部不規(guī)則而宏觀有規(guī)律的特性稱之為紋理;以紋理特性為主導(dǎo)的圖像,常稱為紋理圖像;以紋理特性為主導(dǎo)特性的區(qū)域,常稱為紋理區(qū)域。
139.紋理作為一種區(qū)域特性,在圖像的一定區(qū)域上才能反映或測(cè)量出來(lái)。
140.紋理分析方法:統(tǒng)計(jì)分析法和結(jié)構(gòu)分析法。前者從圖像有關(guān)屬性的統(tǒng)計(jì)分析出發(fā);后者則著力找出紋理基元,然后從結(jié)構(gòu)組成上探索紋理的規(guī)律。也有直接去探求紋理構(gòu)成的結(jié)構(gòu)規(guī)律的。
141.Laws的紋理能量測(cè)量法: f(x,y)à微窗口濾波àF(x,y)à能量轉(zhuǎn)換àE(x,y)à分量旋轉(zhuǎn)àC(x,y)à分類àM(x,y)
142.自相關(guān)函數(shù):
1) 當(dāng)紋理較粗時(shí),ρ(d)隨d的增加下降速度較慢;
2) 當(dāng)紋理較細(xì)時(shí),ρ(d)隨著d的增加下降速度較快。
143.灰度共生矩陣就是從圖像 (x,y)灰度為i的像素出發(fā),統(tǒng)計(jì)與距離為δ=(Δx2+Δy2)1/2、灰度為j的像素同時(shí)出現(xiàn)的概率P(i,j,δ,θ)。
144.灰度共生矩陣必然是對(duì)稱陣,且對(duì)角線上均為偶數(shù)。
第十章 模板匹配
145.當(dāng)對(duì)象物的圖案以圖像的形式表現(xiàn)時(shí),根據(jù)該圖案與一幅圖像的各部分的相似度判斷其是否存在,并求得對(duì)象物在圖像中位置的操作叫做模板匹配。
來(lái)源于百度文庫(kù)
鏈接:https://wenku.baidu.com/view/3ea27a1e59eef8c75fbfb3c1.html
 End
End
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺(jué)、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺(jué)SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~