
光學(xué)成像 |綜述| 高光譜成像技術(shù)概述
點擊上方“小白學(xué)視覺”,選擇加"星標"或“置頂”
重磅干貨,第一時間送達

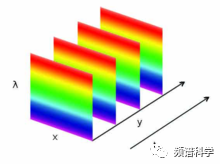
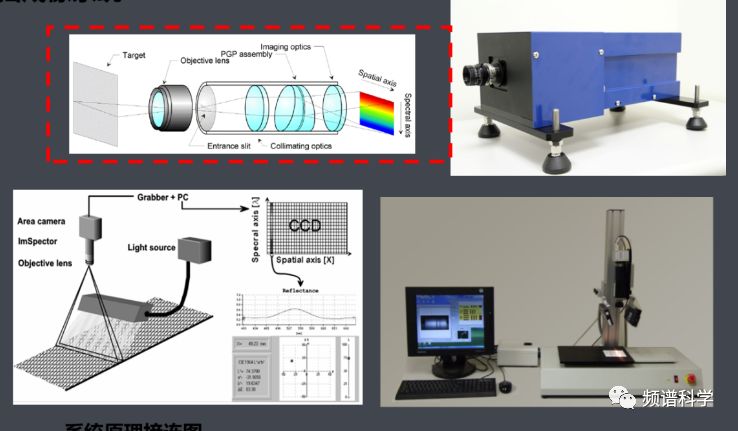
在經(jīng)典物理學(xué)中,光波穿過狹縫、小孔或者圓盤之類的障礙物時,不同波長的光會發(fā)生不同程度的彎散傳播,再通過光柵進行衍射分光,形成一條條譜帶。也就是說:空間中的一維信息通過鏡頭和狹縫后,不同波長的光按照不同程度的彎散傳播,這一維圖像上的每個點,再通過光柵進行衍射分光,形成一個譜帶,照射到探測器上,探測器上的每個像素位置和強度表征光譜和強度。一個點對應(yīng)一個譜段,一條線就對應(yīng)一個譜面,因此探測器每次成像是空間一條線上的光譜信息,為了獲得空間二維圖像再通過機械推掃,完成整個平面的圖像和光譜數(shù)據(jù)采集。
經(jīng)過狹縫的光由于不同波長照射到不同的探測器像元上,光能量很低,因此需要選擇高靈敏相機,同時需要加光源。例如系統(tǒng)如下:

AOTF由聲光介質(zhì)、換能器和聲終端三部分組成。射頻驅(qū)動信號通過換能器在聲光介質(zhì)內(nèi)激勵出超聲波。改變射頻驅(qū)動信號的頻率,可以改變AOTF衍射光的波長,從而實現(xiàn)電調(diào)諧波長的掃描。
最常用的AOTF晶體材料為TeO2即非共線晶體,也就是說光波通過晶體之后以不同的出射角傳播。如上圖所示:在晶體前端有一個換能器,作用于不同的驅(qū)動頻率,產(chǎn)生不同頻率的振動即聲波。不同的驅(qū)動頻率對應(yīng)于不同振動的聲波,聲波通過晶體TeO2之后,使晶體中晶格產(chǎn)生了布拉格衍射,晶格更像一種濾波器,使晶體只能通過一種波長的光。光進入晶體之后發(fā)生衍射,產(chǎn)生衍射光和零級光。 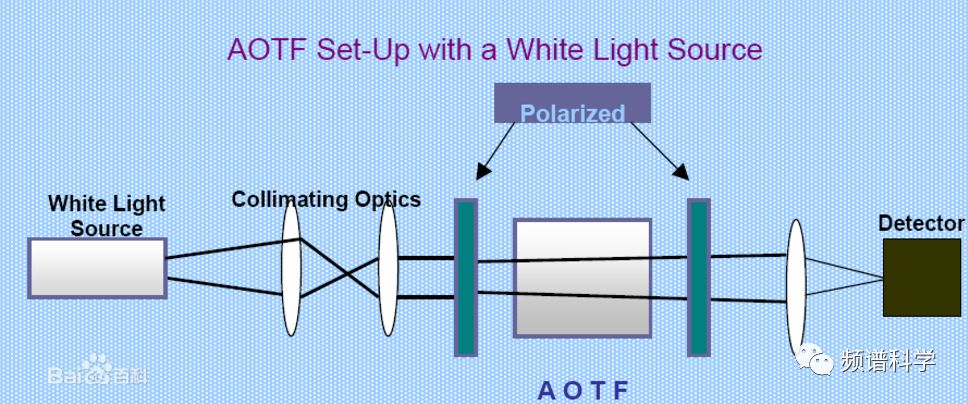
AOTF系統(tǒng)組成:成像物鏡+準直鏡+偏振片+晶體+偏振片+物鏡+detector,入射光經(jīng)過物鏡會聚之后進入準平行鏡(把所有的入射光變成平行光),準平行光進入偏振片通過同一方向的傳播的光,平行光進入晶體之后,平行于光軸的光按照原來方向前行,非平行光進行衍射,分成兩束相互垂直o光和e光(入射光的波長不同經(jīng)過晶體之后的o光與e光的角度也不同,因此在改變波長的過程中,圖像會出現(xiàn)漂移);o光和e光及0級光分別會聚在不同的面上。如圖所示:
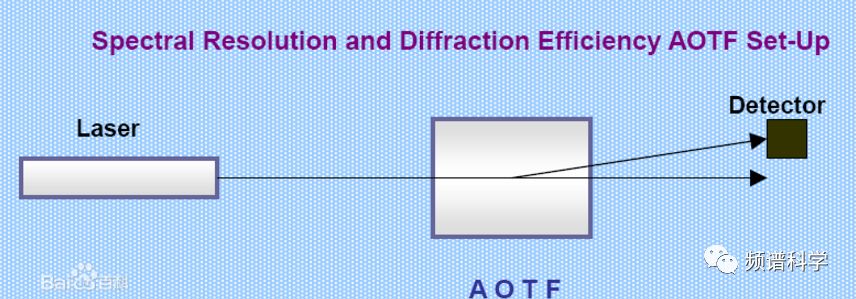
為了保證入射光經(jīng)過準平行鏡之后能夠完全變化成平行光,因此對前端的物鏡視場角有一定的要求,根據(jù)晶體的xxx角,可算出物鏡最大的視場角,小于最大視場角的情況,成像ok,如果大于視場角,則會造成重影(衍射光與0級光都進入了sensor);
不同波長的光經(jīng)過晶體之后衍射光與0級光的夾角也不同,因此為了能夠保證更好的成像效果,在晶體的出光口加入遮擋片,即遮擋0級光,避免與衍射光一起進入sensor,造成重影。
對聚光準直系統(tǒng)的優(yōu)化有兩個方面:1提高光源的聚光效果,2減小聚光準直系統(tǒng)的外形尺寸。
入射光通過棱鏡后被分成不同的方向,然后照射到不同方向的探測器上進行成像。棱鏡分光后,在棱鏡的出射面鍍了不同波段的濾光膜,使得不同方向的探測器可以采集到不同光譜信息,實現(xiàn)同時采集空間及光譜信息。
近年來,IMEC(歐洲微電子研究中心)采用高靈敏CCD芯片及SCMOS芯片研制了一種新的高光譜成像技術(shù),在探測器的像元上分別鍍不同波段的濾波膜實現(xiàn)高光譜成像,此技術(shù)大大降低了高光譜成像的成本。
目前IMEC提供三種標準的光譜探測器:100波帶的線掃描探測器,32波帶的瓷磚式鍍膜探測器,16波帶以4x4為一個波段的馬賽克式鍍膜探測器
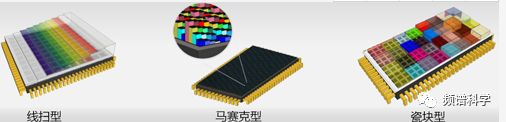
這種光譜技術(shù)的優(yōu)點是可以同時獲得光譜分辨率和空間分辨率,可以進行快速、高性能地獲得光譜信息和空間信息,集成度高,成本低。但是缺點是光譜靈敏度較低,一般大于10nm,多用于無人機等大范圍掃描的光譜應(yīng)用領(lǐng)域。
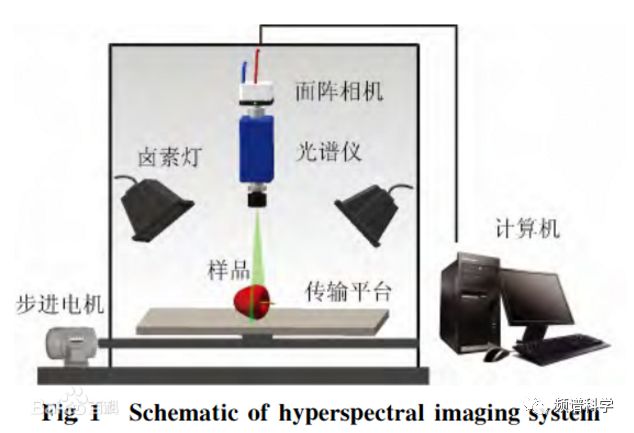
下圖為一個典型的高光譜成像系統(tǒng)結(jié)構(gòu)示意圖。系統(tǒng)主要由面陣相機、分光設(shè)備、光源、傳輸機構(gòu)及計算機軟硬件等五部分構(gòu)成。光源是高光譜成像系統(tǒng)的一個重要部分,它為整個成像系統(tǒng)提供照明;分光設(shè)備是高光譜成像系統(tǒng)的核心元件之一,分光設(shè)備通過光學(xué)元件把寬波長的混合光分散為不同頻率的單波長光,并把分散光投射到面陣相機上;相機是高光譜成像系統(tǒng)的另一個核心元件,光源產(chǎn)生的光與被檢測對象作用后成為物理或化學(xué)信息的載體,然后通過分光元件投射到面陣相機;計算機軟件和硬件用來控制高光譜成像系統(tǒng)采集數(shù)據(jù),針對特定的應(yīng)用進行圖像和光譜數(shù)據(jù)的處理與分析,同時還可以為高光譜圖像提供存儲空間。
隨著高光譜成像的光譜分辨率的提高,其探測能力也有所增強。因此,與全色和多光譜成像相比較,高光譜成像有以下顯著優(yōu)勢。
1. 有著近似連續(xù)的地物光譜信息。高光譜影像在經(jīng)過光譜反射率重建后,能獲取與被探測物近似的連續(xù)的光譜反射率曲線,與它的實測值相匹配,將實驗室中被探測物光譜分析模型應(yīng)用到成像過程中。
2. 對于地表覆蓋的探測和識別能力極大提高。高光譜數(shù)據(jù)能夠探測具有診斷性光譜吸收特征的物質(zhì),能準確的區(qū)分地表植被覆蓋類型,道路地面的材料等。
3. 地形要素分類識別方法是多種多樣的。影像分類既可以采用如貝葉斯判別、決策樹、神經(jīng)網(wǎng)絡(luò)、支持向量機的模式識別方法,也可以采用基于被探測物的光譜數(shù)據(jù)庫的光譜進行匹配的方法。分類識別特征是既可以采用光譜診斷特征,也可以采用特征選擇與提取。
4. 地形要素的定量和半定量分類識別將成為可能。在高光譜影像中能估計出多種被探測物的狀態(tài)參量,大大的提高了成像高定量分析的精度和可靠性。
1. 食品安全
高光譜成像技術(shù)融合了傳統(tǒng)的成像和光譜技術(shù)的優(yōu)點,可以同時獲取被檢測物體的空間信息和光譜信息,因此該技術(shù)既可以像檢測物體的外部品質(zhì),又可以像光譜技術(shù)一樣檢測物體的內(nèi)部品質(zhì)和品質(zhì)安全。目前,已經(jīng)有大量的基于高光譜成像技術(shù)檢測水果和蔬菜品質(zhì)與安全的研究性論文發(fā)表。
2. 醫(yī)學(xué)診斷
高光譜成像是一個新興的,非破壞性的,先進的光學(xué)技術(shù),它具有光譜和成像的雙重功能,這種雙重功能使得高光譜成像能夠同時提供實驗對象的化學(xué)和物理特征,并具有良好的空間分辨率。高光譜成像作為一種特殊光學(xué)診斷技術(shù),具有成像系統(tǒng)多樣化、研究對象廣泛化、臨床診斷實用化和分析方法功能化等特征,具有原位實時活體診斷疾病(特別是腫瘤)的潛力,臨床應(yīng)用前景廣闊,值得深入研究。
3.航天領(lǐng)域
根據(jù)目前公開的信息可以認為航天高光譜成像儀將進入新一輪發(fā)展。在儀器性能方面民用高光譜成像儀主要通過擴大幅寬提高靈敏度等措施來滿足地球科學(xué)等應(yīng)用需求;軍用高光譜成像儀將在空間分辨率譜段覆蓋和信息實時處理能力方面進一步發(fā)展 。根據(jù)現(xiàn)有能力和水平國內(nèi)發(fā)展空間分辨率30m左右幅寬大于60km的航天高光譜成像系統(tǒng)的條件已經(jīng)基本具備,這樣的技術(shù)指標已經(jīng)能夠滿足礦產(chǎn)調(diào)查環(huán)境監(jiān)測和農(nóng)林估產(chǎn)等需求并具有一定的先進性。
交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動駕駛、計算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會逐漸細分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會根據(jù)研究方向邀請進入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會請出群,謝謝理解~