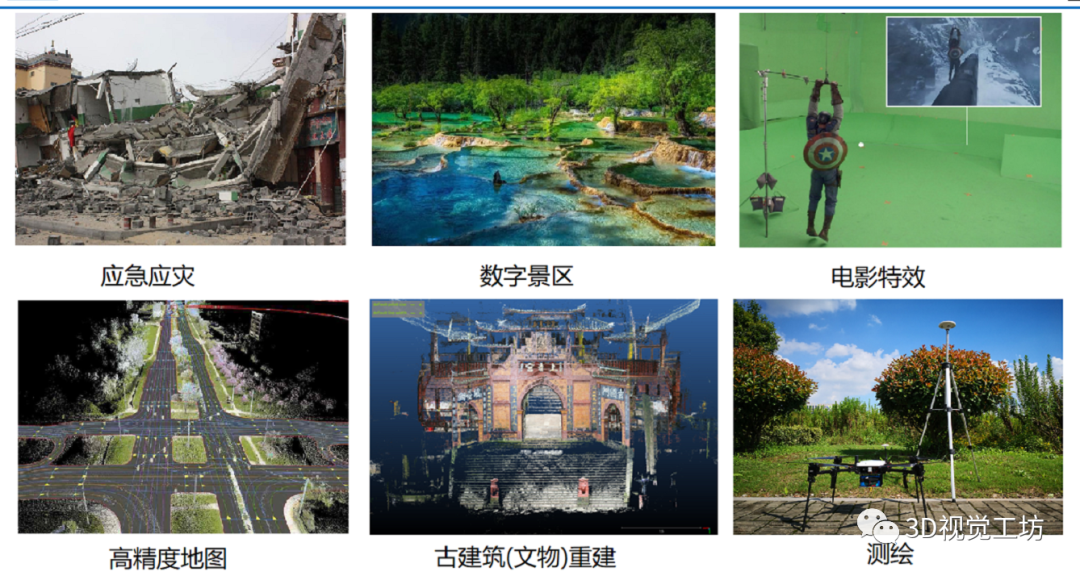
視覺三位重建:計算機視覺的核心任務(wù)
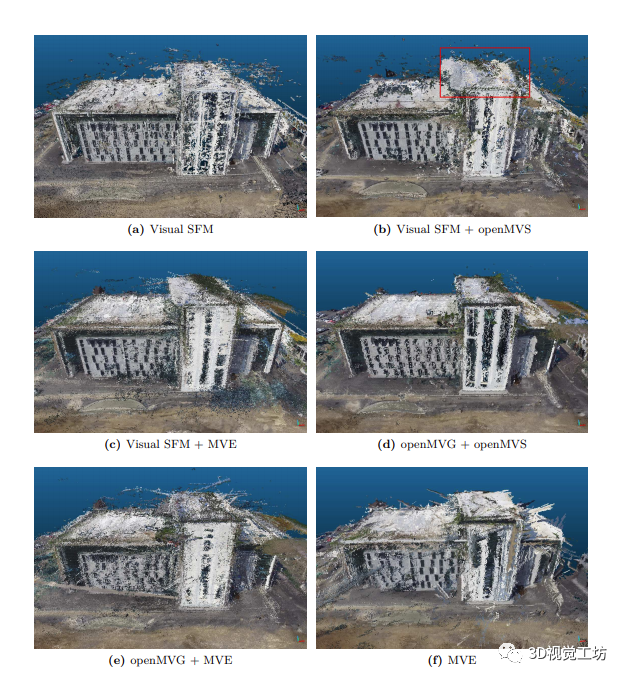
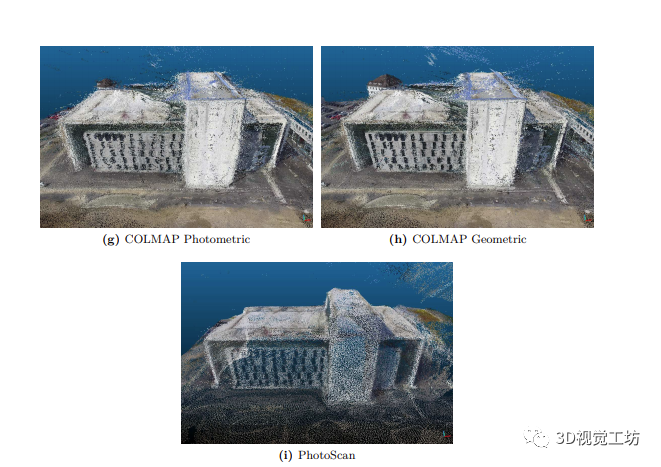
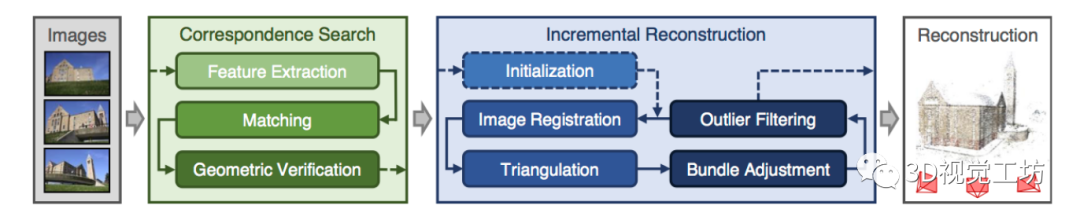 三維重建框架與開源的slam一樣,如何選擇自己的學習工具是很重要的一件事,選擇正確會避免走很多彎路。colmap在代碼結(jié)構(gòu)上,進行模塊化,代碼干凈具備很強的可讀性,是一款非常值得閱讀的開源框架,這無疑是初學者的福音;同時在重建效果上,相比其他開源算法框架和部分商業(yè)框架,也具備很強的優(yōu)勢,具體效果對比如下:
三維重建框架與開源的slam一樣,如何選擇自己的學習工具是很重要的一件事,選擇正確會避免走很多彎路。colmap在代碼結(jié)構(gòu)上,進行模塊化,代碼干凈具備很強的可讀性,是一款非常值得閱讀的開源框架,這無疑是初學者的福音;同時在重建效果上,相比其他開源算法框架和部分商業(yè)框架,也具備很強的優(yōu)勢,具體效果對比如下: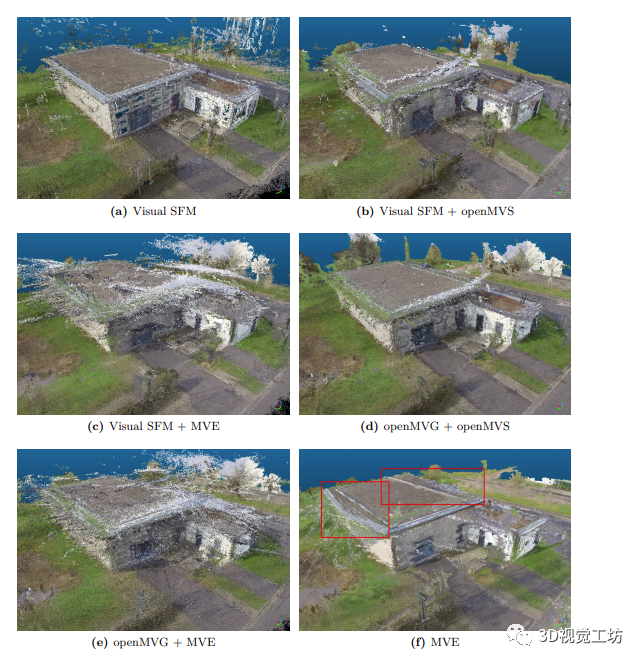
評論
圖片
表情
<b id="afajh"><abbr id="afajh"></abbr></b>
 下載APP三維重建框架與開源的slam一樣,如何選擇自己的學習工具是很重要的一件事,選擇正確會避免走很多彎路。colmap在代碼結(jié)構(gòu)上,進行模塊化,代碼干凈具備很強的可讀性,是一款非常值得閱讀的開源框架,這無疑是初學者的福音;同時在重建效果上,相比其他開源算法框架和部分商業(yè)框架,也具備很強的優(yōu)勢,具體效果對比如下:
下載APP三維重建框架與開源的slam一樣,如何選擇自己的學習工具是很重要的一件事,選擇正確會避免走很多彎路。colmap在代碼結(jié)構(gòu)上,進行模塊化,代碼干凈具備很強的可讀性,是一款非常值得閱讀的開源框架,這無疑是初學者的福音;同時在重建效果上,相比其他開源算法框架和部分商業(yè)框架,也具備很強的優(yōu)勢,具體效果對比如下:<b id="afajh"><abbr id="afajh"></abbr></b>