
圖像采集:機(jī)器視覺(jué)中圖像采集優(yōu)化方法介紹
重磅干貨,第一時(shí)間送達(dá)

機(jī)器視覺(jué)在不同的復(fù)雜技術(shù)領(lǐng)域有著廣泛應(yīng)用。在簡(jiǎn)單的應(yīng)用中(例如,利用背光檢測(cè)不透明物體的輪廓),成像系統(tǒng)可在寬松的系統(tǒng)參數(shù)條件下可靠地運(yùn)行。但在要求較高的應(yīng)用中(比如檢測(cè)鏡面的表面缺陷),必須將主要參數(shù)設(shè)置在較小的公差范圍內(nèi),或使用成本更高的高精度硬件,成像系統(tǒng)才能穩(wěn)定運(yùn)行。
?
成像系統(tǒng)中涉及的主要參數(shù)的數(shù)量,隨著成像應(yīng)用復(fù)雜度的提高而增加。Edmund Optics東京成像實(shí)驗(yàn)室對(duì)此進(jìn)行了研究,對(duì)于要求較高的成像應(yīng)用,需要精確調(diào)整的參數(shù)大約多達(dá)20個(gè)。
本文主要討論圖像采集優(yōu)化(以下稱為OIA),即:將成像系統(tǒng)中的所有主要參數(shù)調(diào)整到能夠獲得最佳圖像的過(guò)程。完成OIA后,獲得的圖像具有以下共同特點(diǎn):
1)在成像系統(tǒng)物理?xiàng)l件限制下,所拍攝的圖像獲得盡可能多的有用信息;
2)盡可能多地利用相機(jī)傳感器的有效像素,讓待測(cè)工件在視野范圍內(nèi)(FOV)最大呈現(xiàn),僅受工件幾何形狀和位置變化的限制;
3)在不使用降噪算法的情況下,圖像具有最高的信噪比,僅受傳感器的參數(shù)限制;
4)圖像的動(dòng)態(tài)范圍接近最大值,沒(méi)有達(dá)到飽和;
5)圖像中沒(méi)有來(lái)自其他外部環(huán)境產(chǎn)生的不必要影像(例如未使用擴(kuò)散片的環(huán)形光產(chǎn)生的亮斑)。
為達(dá)成OIA,需要對(duì)所有主要參數(shù)進(jìn)行精確調(diào)整。經(jīng)過(guò)OIA調(diào)整后的成像系統(tǒng),為機(jī)器視覺(jué)系統(tǒng)集成商提供了以下優(yōu)勢(shì):
1)高性價(jià)比
成像系統(tǒng)中的關(guān)鍵組件(成像鏡頭、相機(jī)、照明光源和光機(jī)結(jié)構(gòu))充分發(fā)揮作用,實(shí)現(xiàn)了具有成本效益的解決方案。
2)最少的圖像運(yùn)算處理和分析,最低的軟件復(fù)雜度
由于OIA可以獲得高還原度、高對(duì)比度和低噪聲的圖像,因此對(duì)圖像處理算法(例如降噪、直方圖均衡、膨脹/腐蝕)的需要降至最低,從而顯著減少了開(kāi)發(fā)周期、測(cè)試時(shí)間和硬件成本。
3)顯著降低誤判率,高質(zhì)量的圖像減少了測(cè)試錯(cuò)誤
已經(jīng)調(diào)整好的成像系統(tǒng)可以滿足以下條件,如圖1和圖2所示:
1)像平面(傳感器面)和物面(檢查工件表面)平行;
2)被檢查的工件表面位于工作距離(WD)最佳聚焦位置;
3)被檢查的工件,接近FOV拍攝矩形成像區(qū)域大小,但不超過(guò)FOV;
4)工件中心位于鏡頭的光軸上;
5)被檢查工件的淺色(白色、淺灰色等)區(qū)域特征,其成像亮度接近像素灰度飽和值(例如8位格式為255,灰度值可以達(dá)到220),但未達(dá)到飽和。
?
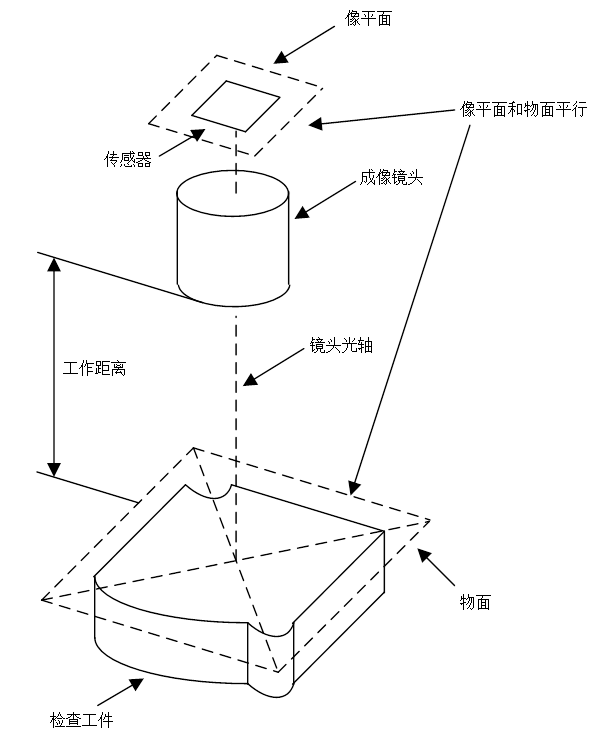
圖1:成像系統(tǒng)調(diào)整要求,透視圖
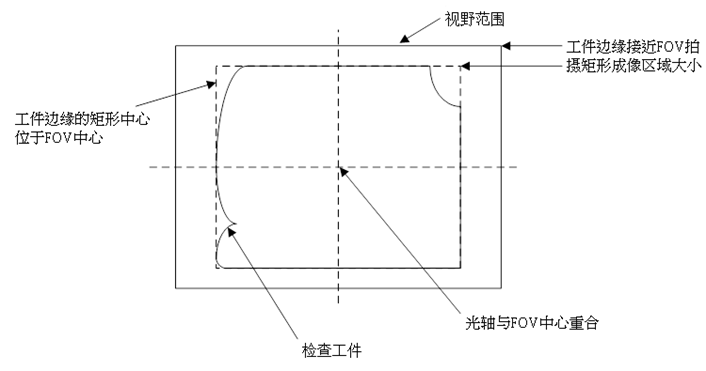
圖2:成像系統(tǒng)調(diào)整要求,上視圖
通常的調(diào)整方法是:操作人員通過(guò)相機(jī)觀察圖像,以主觀判斷完成。由Edmund Optics 日本分公司開(kāi)發(fā)的調(diào)整應(yīng)用程序,可對(duì)成像系統(tǒng)中的11-17個(gè)參數(shù)(取決于硬件條件)進(jìn)行即時(shí)測(cè)量,從而為操作人員提供實(shí)時(shí)量化的參數(shù)以進(jìn)行判斷。
?
以下案例中,使用的是西門子星標(biāo)測(cè)試板(產(chǎn)品編號(hào)58835)。將星標(biāo)測(cè)試板的標(biāo)刻面朝向成像系統(tǒng),并使其與待測(cè)物平面重合。
?
使用EO開(kāi)發(fā)的EORTM(Edmund Optics Real-Time Metrology)軟件,實(shí)時(shí)運(yùn)算和分析拍攝到的測(cè)試板圖像。EORTM可以在精確調(diào)整至少8組硬件參數(shù)(光學(xué)機(jī)械平臺(tái)的六個(gè)自由度、光源亮度和相機(jī)曝光時(shí)間)的過(guò)程中,給操作人員提供實(shí)時(shí)閉環(huán)反饋。
?
借助EORTM,在高精度機(jī)器視覺(jué)應(yīng)用中調(diào)整參數(shù)的時(shí)間,從大約數(shù)小時(shí)減少到20分鐘甚至更短,但是精度卻提高了至少2倍,因?yàn)樗峁┚_可量化指標(biāo),而不是依靠主觀判斷。
?
一旦所有硬件調(diào)整都在軟件設(shè)定的允許范圍內(nèi),EORTM將顯示如圖3所示的全部通過(guò)狀態(tài),并且判定圖像系統(tǒng)已調(diào)整完成。
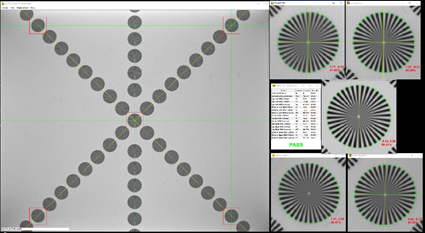
圖3:使用EORTM軟件和西門子星標(biāo)測(cè)試板進(jìn)行微調(diào)
硬件配置包含一個(gè)6維自由度調(diào)整平臺(tái)和相關(guān)的光機(jī)結(jié)構(gòu)件,以及照明光源和測(cè)試板,完全由EO產(chǎn)品目錄中的標(biāo)準(zhǔn)產(chǎn)品組成,如圖4所示。
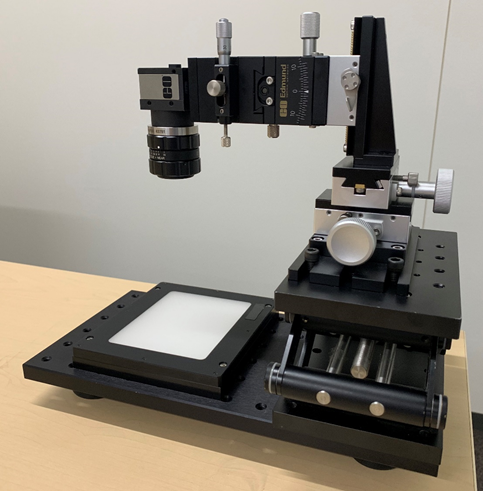
圖4:Edmund Optics 6維調(diào)整定位平臺(tái)用于成像系統(tǒng)調(diào)整
為了達(dá)到OIA,需要精確調(diào)整近20種光學(xué)、機(jī)械、電子和軟件參數(shù)。表1中列出了這些參數(shù),根據(jù)其需要調(diào)整的頻率歸類為:
1)設(shè)計(jì)階段(DT):一次,系統(tǒng)規(guī)劃選型時(shí);
2)設(shè)置階段(ST):一次,相機(jī)初始化安裝時(shí);
3)實(shí)時(shí)調(diào)整(RT):多次,在OIA調(diào)整過(guò)程中視需要,可通過(guò)可視化或使用軟件實(shí)時(shí)測(cè)量獲得反饋。
表1:OIA調(diào)整過(guò)程的主要參數(shù)
# | 類別 | 硬件 | 參數(shù) | 調(diào)整階段 |
1 | 電子 | 相機(jī) | 像素?cái)?shù)量1 | DT |
2 | 傳感器大小?2 | |||
3 | 照明 | 峰值波長(zhǎng) | ||
4 | 光譜分布 | |||
5 | 光學(xué) | 光束發(fā)散角 | ||
6 | 鏡頭 | 視場(chǎng)大小 | ||
7 | MTF | |||
8 | 軟件 ? | 相機(jī) | 圖像銳化 | ST |
9 | 噪聲處理 | |||
10 | 增益設(shè)定 | |||
11 | Gamma曲線校正 | |||
12 | 暗階設(shè)定 | |||
13 | 軟件/電子 | 曝光時(shí)間 | RT | |
14 | 照明 | 照度 | ||
15 | 光機(jī) | X軸位移 | ||
16 | Y軸位移 | |||
17 | Z軸位移 | |||
18 | X角度傾斜 | |||
19 | Y角度傾斜 | |||
20 | 成像系統(tǒng) | X軸位移 | ||
21 | Y軸位移 | |||
22 | Z軸位移 | |||
23 | X角度傾斜 | |||
24 | Y角度傾斜 | |||
25 | Z角度傾斜 |
注:1:通常也稱為分辨率;2:像素大小代表圖像分辨率,這里沒(méi)有列出,因?yàn)樗梢愿鶕?jù)像素?cái)?shù)量和傳感器尺寸計(jì)算得出。
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺(jué)、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺(jué)SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~