
特征提取:傳統(tǒng)算法 vs 深度學(xué)習(xí)
點(diǎn)擊下方卡片,關(guān)注“新機(jī)器視覺”公眾號(hào)
重磅干貨,第一時(shí)間送達(dá)
概述
特征提取是計(jì)算機(jī)視覺中的一個(gè)重要主題。不論是SLAM、SFM、三維重建等重要應(yīng)用的底層都是建立在特征點(diǎn)跨圖像可靠地提取和匹配之上。特征提取是計(jì)算機(jī)視覺領(lǐng)域經(jīng)久不衰的研究熱點(diǎn),總的來說,快速、準(zhǔn)確、魯棒的特征點(diǎn)提取是實(shí)現(xiàn)上層任務(wù)基本要求。
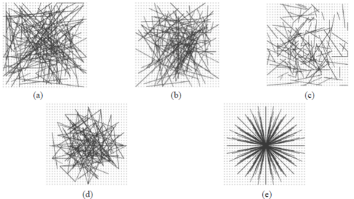
特征點(diǎn)是圖像中梯度變化較為劇烈的像素,比如:角點(diǎn)、邊緣等。FAST(Features from Accelerated Segment Test)是一種高速的角點(diǎn)檢測(cè)算法;而尺度不變特征變換SIFT(Scale-invariant feature transform)仍然可能是最著名的傳統(tǒng)局部特征點(diǎn)。也是迄今使用最為廣泛的一種特征。特征提取一般包含特征點(diǎn)檢測(cè)和描述子計(jì)算兩個(gè)過程。描述子是一種度量特征相似度的手段,用來確定不同圖像中對(duì)應(yīng)空間同一物體,比如:BRIEF(Binary Robust IndependentElementary Features)描述子。可靠的特征提取應(yīng)該包含以下特性:
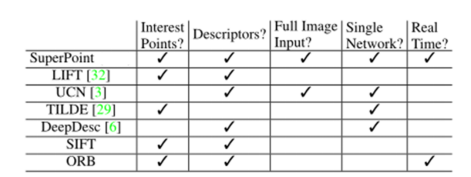
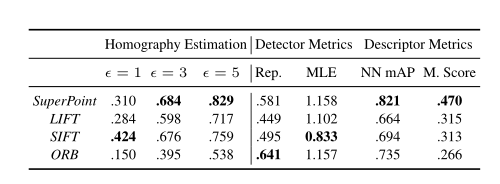
近幾年深度學(xué)習(xí)的興起使得不少學(xué)者試圖使用深度網(wǎng)絡(luò)提取圖像特征點(diǎn),并且取得了階段性的結(jié)果。圖1給出了不同特征提取方法的特性。本文中的傳統(tǒng)算法以O(shè)RB特征為例,深度學(xué)習(xí)以SuperPoint為例來闡述他們的原理并對(duì)比性能。
傳統(tǒng)算法—ORB特征


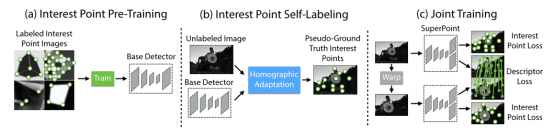
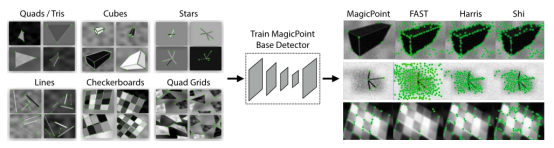
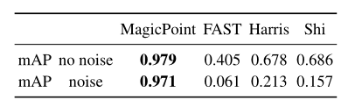
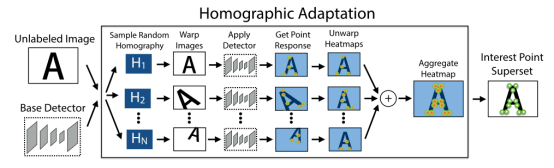
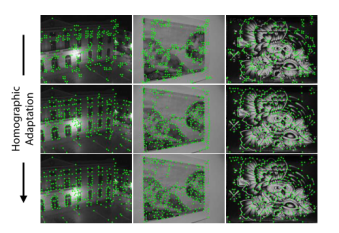
深度學(xué)習(xí)的方法—SuperPoint



結(jié)論
本文僅做學(xué)術(shù)分享,如有侵權(quán),請(qǐng)聯(lián)系刪文。
—THE END—