
原創(chuàng) | 《相機(jī)標(biāo)定》深入理解原理與實(shí)戰(zhàn)(一)

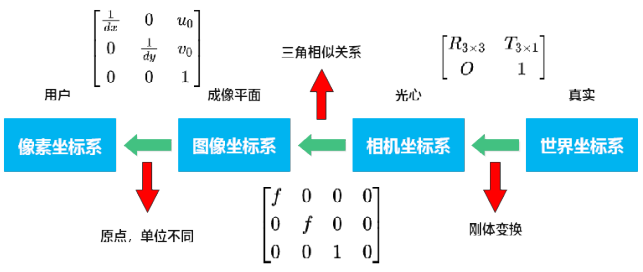
世界坐標(biāo)系(world Coords):點(diǎn)在真實(shí)世界中的位置,描述相機(jī)位置,單位 m。
相機(jī)坐標(biāo)系(Cameras Coords):以相機(jī) sensor 中心為原點(diǎn),建立相機(jī)坐標(biāo)系,單位 m。
圖像物理坐標(biāo)系(Film Coords):經(jīng)過(guò)小孔成像后得到的二維坐標(biāo)系,單位 mm。
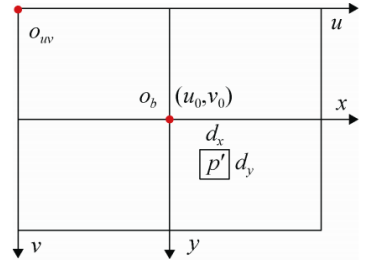
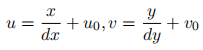
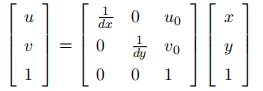
像素坐標(biāo)系(Pixel Coords):成像點(diǎn)在相機(jī) sensor 上像素的行數(shù)和列數(shù),原點(diǎn)為圖像左上角,不帶有任何物理單位,或者說(shuō)單位是 pixel主點(diǎn):光軸與圖像平面的交點(diǎn)為主點(diǎn),即圖1.2中的點(diǎn) p。
主點(diǎn):光軸與圖像平面的交點(diǎn)為主點(diǎn),即圖1.2中的點(diǎn) p。
 到相機(jī)坐標(biāo)系
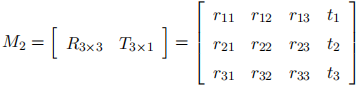
到相機(jī)坐標(biāo)系 的對(duì)應(yīng)關(guān)系,他們的轉(zhuǎn)換關(guān)系可以通過(guò)矩陣 R, T 來(lái)表征。R 是相機(jī)坐標(biāo)系相對(duì)于世界坐標(biāo)系的旋轉(zhuǎn)矩陣,T 是相機(jī)坐標(biāo)系相對(duì)于世界坐標(biāo)系的平移矩陣,即相機(jī)的中心在世界坐標(biāo)系的坐標(biāo)。他們的之間的轉(zhuǎn)換關(guān)系可以通過(guò)矩陣表示為下面的公式:
的對(duì)應(yīng)關(guān)系,他們的轉(zhuǎn)換關(guān)系可以通過(guò)矩陣 R, T 來(lái)表征。R 是相機(jī)坐標(biāo)系相對(duì)于世界坐標(biāo)系的旋轉(zhuǎn)矩陣,T 是相機(jī)坐標(biāo)系相對(duì)于世界坐標(biāo)系的平移矩陣,即相機(jī)的中心在世界坐標(biāo)系的坐標(biāo)。他們的之間的轉(zhuǎn)換關(guān)系可以通過(guò)矩陣表示為下面的公式: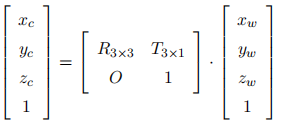
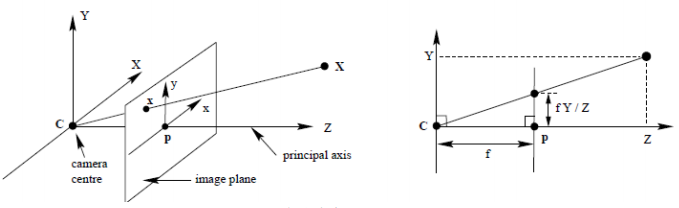
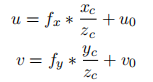
 在圖像坐標(biāo)系中的成像點(diǎn)是 p′(x, y)。這里基于的是小孔成像的原理,原理如圖1.2的左圖所示,焦距是 f,成像面是與 XOY 平面平行且距離原點(diǎn) f 的平面。圖1.2的右圖為 ZcY 截面。利用相似三角形可以求出:
在圖像坐標(biāo)系中的成像點(diǎn)是 p′(x, y)。這里基于的是小孔成像的原理,原理如圖1.2的左圖所示,焦距是 f,成像面是與 XOY 平面平行且距離原點(diǎn) f 的平面。圖1.2的右圖為 ZcY 截面。利用相似三角形可以求出: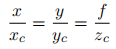
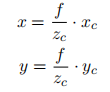
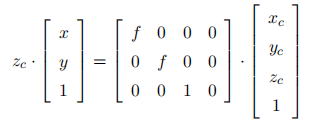
 ,代表焦距除以單個(gè)的像素大小,所以單位是像素,在相機(jī)的標(biāo)定過(guò)程中 dx, dy, f 均不能直接測(cè)量得到的,組合值 fx, fy 可以標(biāo)定得到。zc 是三維點(diǎn)在相機(jī)坐標(biāo)系中深度值。從世界坐標(biāo)系到像素坐標(biāo)系,寫(xiě)成矩陣形式,可以得到:
,代表焦距除以單個(gè)的像素大小,所以單位是像素,在相機(jī)的標(biāo)定過(guò)程中 dx, dy, f 均不能直接測(cè)量得到的,組合值 fx, fy 可以標(biāo)定得到。zc 是三維點(diǎn)在相機(jī)坐標(biāo)系中深度值。從世界坐標(biāo)系到像素坐標(biāo)系,寫(xiě)成矩陣形式,可以得到: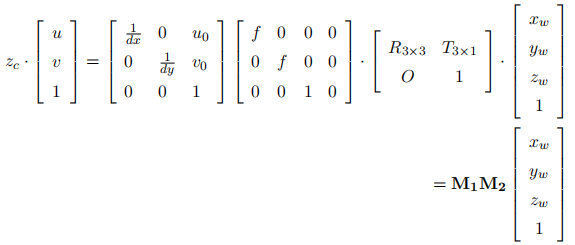



作者簡(jiǎn)介
林夕,電子科技大學(xué)碩士,主要研究方向:推薦系統(tǒng)、自然語(yǔ)言處理和金融風(fēng)控。希望能將算法應(yīng)用在更多的行業(yè)中。
編輯:于騰凱
校對(duì):李敏
評(píng)論
圖片
表情