
雙目線激光三維掃描技術(shù)原理剖析
點(diǎn)擊下方卡片,關(guān)注“新機(jī)器視覺”公眾號(hào)
視覺/圖像重磅干貨,第一時(shí)間送達(dá)
背景
激光掃描三維測(cè)量技術(shù)憑借其非接觸、精度高、適用范圍廣等優(yōu)點(diǎn),目前已經(jīng)成為工業(yè)領(lǐng)域中不可或缺的技術(shù),具有很高的研究?jī)r(jià)值。該項(xiàng)技術(shù)被廣泛用于產(chǎn)品缺陷檢查、自動(dòng)化裝配、尺寸測(cè)量、文物重建和視覺導(dǎo)航等領(lǐng)域,具有非常高的實(shí)用價(jià)值。原理
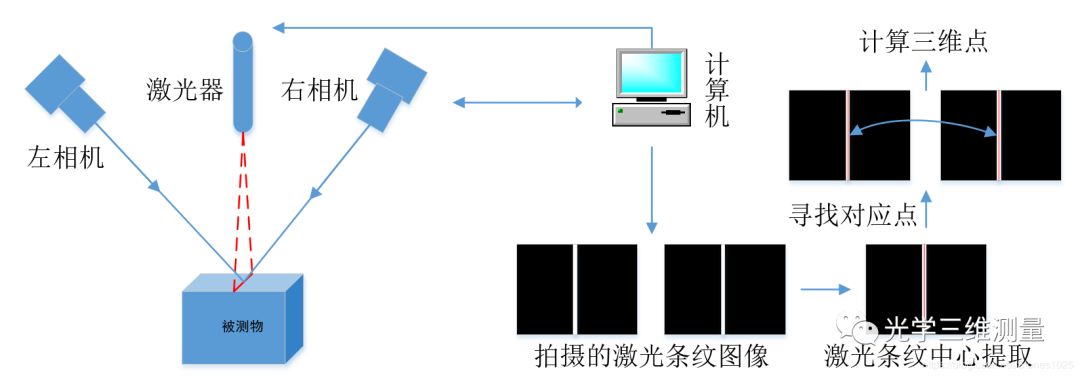
本文介紹的是一種基于線激光掃描和雙目立體視覺相結(jié)合的三維測(cè)量系統(tǒng),該種線激光掃描系統(tǒng)可以避免傳統(tǒng)單相機(jī)掃描技術(shù)中標(biāo)定激光平面的過程,提高三維測(cè)量精度。該測(cè)量系統(tǒng)由兩個(gè)相機(jī)、一個(gè)先激光投射器和一個(gè)旋轉(zhuǎn)電機(jī)組成,如圖1所示,測(cè)量時(shí)通過向被測(cè)物體投射單條線激光條紋,然后由旋轉(zhuǎn)電機(jī)帶動(dòng)激光條紋掃描整個(gè)被測(cè)物體,掃描的同時(shí)立體視覺系統(tǒng)以指定的幀率拍攝被測(cè)物體;根據(jù)所拍攝的含有激光條紋的立體圖像對(duì),由立體視覺的極線約束和激光條紋特征計(jì)算出立體視覺系統(tǒng)之間的對(duì)應(yīng)性關(guān)系;最后根據(jù)預(yù)先標(biāo)定好的系統(tǒng)參數(shù)按照雙目立體視覺的方法計(jì)算出物體的三維點(diǎn)云數(shù)據(jù)。
算法流程
系統(tǒng)標(biāo)定(單相機(jī)標(biāo)定和立體視覺系統(tǒng)標(biāo)定);

2. 立體視覺校正;


3.線激光條紋中心提取;
傳統(tǒng)的線激光條紋提取技術(shù)有極值法、閾值法、高斯擬合法、灰度重心法等。

4.查找立體視覺對(duì)應(yīng)性;
在雙目線激光掃描三維測(cè)量系統(tǒng)中,使用兩個(gè)約束來唯一確定立體視覺對(duì)應(yīng)性。第一,極線約束;第二,線激光條紋的幾何屬性。使用該兩個(gè)屬性即可唯一確定立體視覺的對(duì)應(yīng)點(diǎn)坐標(biāo)。
5.三維重建。
該部分比較簡(jiǎn)單,直接使用光學(xué)三角法即可。
測(cè)量案例



聲明:部分內(nèi)容來源于網(wǎng)絡(luò),僅供讀者學(xué)習(xí)、交流之目的。文章版權(quán)歸原作者所有。如有不妥,請(qǐng)聯(lián)系刪除。