
一文圖解卡爾曼濾波(Kalman Filter)
點(diǎn)擊上方“小白學(xué)視覺(jué)”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

譯者注:這恐怕是全網(wǎng)有關(guān)卡爾曼濾波最簡(jiǎn)單易懂的解釋?zhuān)绻阏J(rèn)真的讀完本文,你將對(duì)卡爾曼濾波有一個(gè)更加清晰的認(rèn)識(shí),并且可以手推卡爾曼濾波。原文作者使用了漂亮的圖片和顏色來(lái)闡明它的原理(讀起來(lái)并不會(huì)因公式多而感到枯燥),所以請(qǐng)勇敢地讀下去!
本人翻譯水平有限,如有疑問(wèn),請(qǐng)閱讀原文;如有錯(cuò)誤,請(qǐng)?jiān)谠u(píng)論區(qū)指出。推薦閱讀原文,排版比較美:)
背景
關(guān)于濾波
首先援引來(lái)自知乎大神的解釋。
“一位專(zhuān)業(yè)課的教授給我們上課的時(shí)候,曾談到:filtering is weighting(濾波即加權(quán))。濾波的作用就是給不同的信號(hào)分量不同的權(quán)重。最簡(jiǎn)單的loss pass filter, 就是直接把低頻的信號(hào)給1權(quán)重,而給高頻部分0權(quán)重。對(duì)于更復(fù)雜的濾波,比如維納濾波, 則要根據(jù)信號(hào)的統(tǒng)計(jì)知識(shí)來(lái)設(shè)計(jì)權(quán)重。
從統(tǒng)計(jì)信號(hào)處理的角度,降噪可以看成濾波的一種。降噪的目的在于突出信號(hào)本身而抑制噪聲影響。從這個(gè)角度,降噪就是給信號(hào)一個(gè)高的權(quán)重而給噪聲一個(gè)低的權(quán)重。維納濾波就是一個(gè)典型的降噪濾波器。”
關(guān)于卡爾曼濾波
Kalman Filter 算法,是一種遞推預(yù)測(cè)濾波算法,算法中涉及到濾波,也涉及到對(duì)下一時(shí)刻數(shù)據(jù)的預(yù)測(cè)。Kalman Filter 由一系列遞歸數(shù)學(xué)公式描述。它提供了一種高效可計(jì)算的方法來(lái)估計(jì)過(guò)程的狀態(tài),并使估計(jì)均方誤差最小。卡爾曼濾波器應(yīng)用廣泛且功能強(qiáng)大:它可以估計(jì)信號(hào)的過(guò)去和當(dāng)前狀態(tài),甚至能估計(jì)將來(lái)的狀態(tài),即使并不知道模型的確切性質(zhì)。
Kalman Filter 也可以被認(rèn)為是一種數(shù)據(jù)融合算法(Data fusion algorithm),已有50多年的歷史,是當(dāng)今使用最重要和最常見(jiàn)的數(shù)據(jù)融合算法之一。Kalman Filter 的巨大成功歸功于其小的計(jì)算需求,優(yōu)雅的遞歸屬性以及作為具有高斯誤差統(tǒng)計(jì)的一維線性系統(tǒng)的最優(yōu)估計(jì)器的狀態(tài)。
Kalman Filter 只能減小均值為0的測(cè)量噪聲帶來(lái)的影響。只要噪聲期望為0,那么不管方差多大,只要迭代次數(shù)足夠多,那效果都很好。反之,噪聲期望不為0,那么估計(jì)值就還是與實(shí)際值有偏差[3]。
問(wèn)題描述
上面的描述可能把大家繞暈了,下面來(lái)點(diǎn)輕松的。
我們會(huì)有一個(gè)疑問(wèn):卡爾曼濾波到底是如何解決實(shí)際問(wèn)題的呢?
我們以機(jī)器人為例介紹卡爾曼濾波的原理,我們的任務(wù)是要預(yù)測(cè)機(jī)器人的狀態(tài),包括位置與速度,即可表示為:
某個(gè)時(shí)刻,我們不知道真實(shí)的位置與速度到底是多少,二者存在一個(gè)所有可能性的組合,大致如下圖所示。
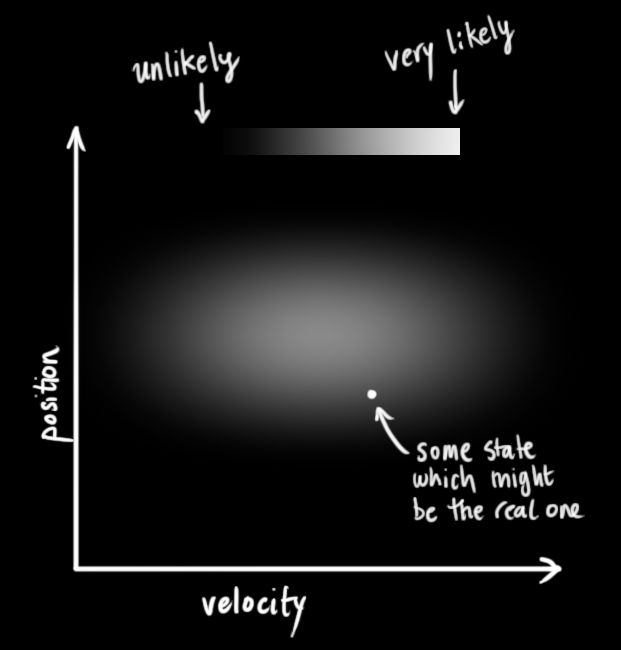
卡爾曼濾波假設(shè)狀態(tài)所有的變量都是隨機(jī)的且都服從高斯分布,每個(gè)變量都有其對(duì)應(yīng)的均值以及方差(它代表了不確定性)。
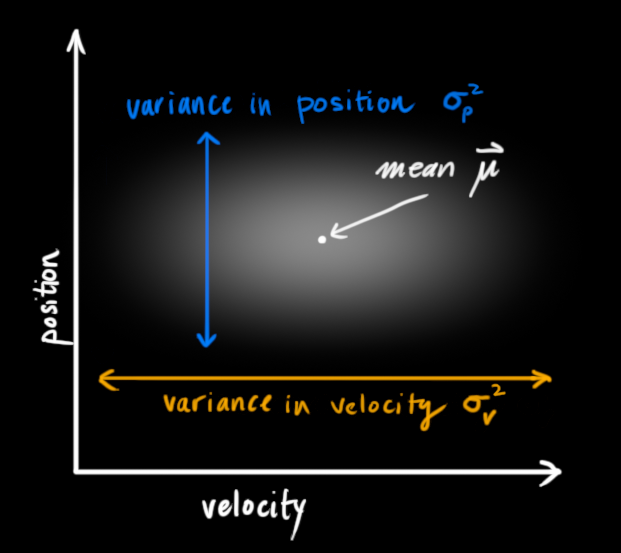
在上圖中,位置和速度是不相關(guān)(uncorrelated)的,這意味著某個(gè)變量的狀態(tài)不會(huì)告訴你其他變量的狀態(tài)是怎樣的。即,我們雖然知道現(xiàn)在的速度,但無(wú)法從現(xiàn)在的速度推測(cè)出現(xiàn)在的位置。但實(shí)際上并非如此,我們知道速度和位置是有關(guān)系的(correlated),這樣一來(lái)二者之間的組合關(guān)系變成了如下圖所示的情況。
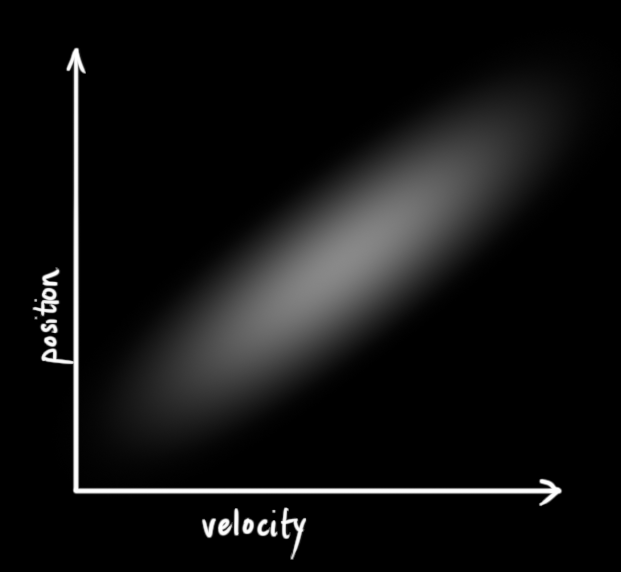
這種情況是很容易發(fā)生的,例如,如果速度很快,我們可能會(huì)走得更遠(yuǎn),所以我們的位置會(huì)更大。如果我們走得很慢,我們就不會(huì)走得太遠(yuǎn)。
這種狀態(tài)變量之間的關(guān)系很重要,因?yàn)樗梢詾槲覀兲峁?strong>更多信息:One measurement tells us something about what the others could be。這就是卡爾曼濾波器的目標(biāo),我們希望從不確定的測(cè)量中盡可能多地獲取信息!
這種狀態(tài)量的相關(guān)性可以由協(xié)方差矩陣表示。簡(jiǎn)而言之,矩陣的每個(gè)元素是第i個(gè)狀態(tài)變量和第j個(gè)狀態(tài)變量之間的相關(guān)度。(顯然地可以知道協(xié)方差矩陣是對(duì)稱(chēng)的,這意味著交換i和j都沒(méi)關(guān)系)。協(xié)方差矩陣通常標(biāo)記為“?”,因此我們將它們的元素稱(chēng)為“”。

狀態(tài)預(yù)測(cè)
問(wèn)題的矩陣形式表示
我們把狀態(tài)建模成高斯分布(Gaussian blob,由于二維高斯分布長(zhǎng)得像一個(gè)個(gè)小泡泡,之所以長(zhǎng)這個(gè)樣子,可參考鏈接[2])。我們需要求解/估計(jì)在時(shí)間時(shí)刻的兩個(gè)信息:1. 最優(yōu)估計(jì)以及它的協(xié)方差矩陣,我們可以寫(xiě)成下面矩陣形式:
(當(dāng)然,這里我們僅使用位置和速度,但是請(qǐng)記住狀態(tài)可以包含任意數(shù)量的變量,并且可以表示所需的任何變量)
接下來(lái),我們需要某種方式來(lái)查看當(dāng)前狀態(tài)(時(shí)刻)并預(yù)測(cè)在時(shí)刻處的狀態(tài)。請(qǐng)記住,我們不知道哪個(gè)狀態(tài)是“真實(shí)”狀態(tài),但是這里提到的預(yù)測(cè)(prediction)并不在乎這些。

我們可以用一個(gè)矩陣來(lái)表示這個(gè)預(yù)測(cè)過(guò)程:

這個(gè)矩陣將原始估計(jì)中的每個(gè)點(diǎn)移動(dòng)到新的預(yù)測(cè)位置。
那么問(wèn)題來(lái)了,應(yīng)該如何使用上述矩陣來(lái)預(yù)測(cè)下一時(shí)刻的位置和速度呢?為了闡述這個(gè)過(guò)程,我們使用了一個(gè)非常基礎(chǔ)的運(yùn)動(dòng)學(xué)公式(初中物理中就學(xué)過(guò))進(jìn)行描述:
寫(xiě)成矩陣形式:
現(xiàn)在我們有了一個(gè)預(yù)測(cè)矩陣或者叫做狀態(tài)轉(zhuǎn)移矩陣,該矩陣可以幫助我們計(jì)算下一個(gè)時(shí)刻的狀態(tài)。但我們?nèi)匀徊恢廊绾胃聽(tīng)顟B(tài)的協(xié)方差矩陣,其實(shí)過(guò)程也是很簡(jiǎn)單,如果我們將分布中的每個(gè)點(diǎn)乘以矩陣,那么其協(xié)方差矩陣會(huì)發(fā)生什么?
將公式(3)代入公式(4)我們可以得到:
External influence
不過(guò)我們并沒(méi)有考慮到所有的影響因素。可能有一些與狀態(tài)本身無(wú)關(guān)的變化——如外界因素可能正在影響系統(tǒng)。
例如,我們用狀態(tài)對(duì)列車(chē)的運(yùn)動(dòng)進(jìn)行建模,如果列車(chē)長(zhǎng)加大油門(mén),火車(chē)就加速。同樣,在我們的機(jī)器人示例中,導(dǎo)航系統(tǒng)軟件可能會(huì)發(fā)出使車(chē)輪轉(zhuǎn)動(dòng)或停止的命令。如果我們很明確地知道這些因素,我們可以將其放在一起構(gòu)成一個(gè)向量,我們可以對(duì)這個(gè)量進(jìn)行某些“處理”,然后將其添加到我們的預(yù)測(cè)中對(duì)狀態(tài)進(jìn)行更正。
假設(shè)我們知道由于油門(mén)設(shè)置或控制命令而產(chǎn)生的預(yù)期加速度。根據(jù)基本運(yùn)動(dòng)學(xué)原理,我們可以得到下式:
將其寫(xiě)成矩陣形式:
其中被稱(chēng)為控制矩陣,被稱(chēng)為控制向量。(注意:對(duì)于沒(méi)有外部影響的簡(jiǎn)單系統(tǒng),可以忽略這個(gè)控制項(xiàng))。
如果我們的預(yù)測(cè)并不是100%準(zhǔn)確模型,這會(huì)發(fā)生什么呢?
External uncertainty
如果狀態(tài)僅僅依賴(lài)其自身的屬性進(jìn)行演進(jìn),那一切都會(huì)很好。如果狀態(tài)受到外部因素進(jìn)行演進(jìn),我們只要知道這些外部因素是什么,那么一切仍然很好。
但在實(shí)際使用中,我們有時(shí)不知道的這些外部因素到底是如何被建模的。例如,我們要跟蹤四軸飛行器,它可能會(huì)隨風(fēng)搖晃;如果我們跟蹤的是輪式機(jī)器人,則車(chē)輪可能會(huì)打滑,或者因地面顛簸導(dǎo)致其減速。我們無(wú)法跟蹤這些外部因素,如果發(fā)生任何這些情況,我們的預(yù)測(cè)可能會(huì)出錯(cuò),因?yàn)槲覀儾](méi)有考慮這些因素。
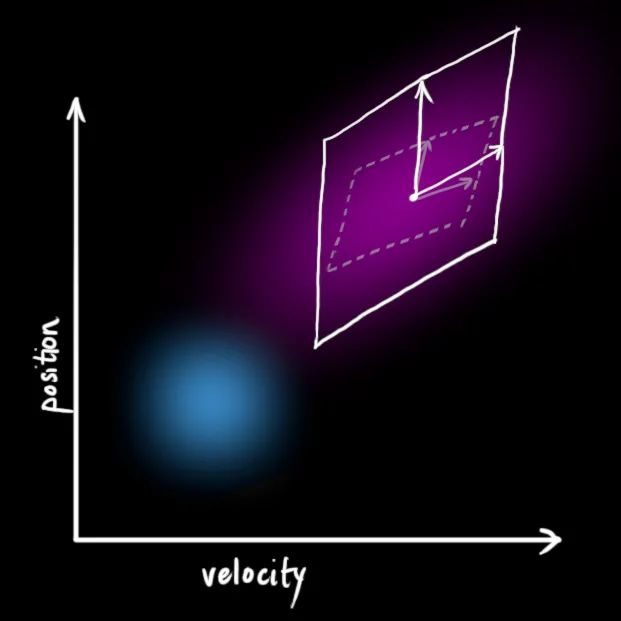
通過(guò)在每個(gè)預(yù)測(cè)步驟之后添加一些新的不確定性,我們可以對(duì)與“世界”相關(guān)的不確定性進(jìn)行建模(如我們無(wú)法跟蹤的事物):

這樣一來(lái),由于新增的不確定性原始估計(jì)中的每個(gè)狀態(tài)都可能遷移到多個(gè)狀態(tài)。因?yàn)槲覀兎浅O矚g用高斯分布進(jìn)行建模,此處也不例外。我們可以說(shuō)的每個(gè)點(diǎn)都移動(dòng)到具有協(xié)方差的高斯分布內(nèi)的某個(gè)位置,如下圖所示:

這將產(chǎn)生一個(gè)新的高斯分布,其協(xié)方差不同(但均值相同):
所以呢,我們?cè)跔顟B(tài)量的協(xié)方差中增加額外的協(xié)方差,所以預(yù)測(cè)階段完整的狀態(tài)轉(zhuǎn)移方程為:
換句話說(shuō):新的最佳估計(jì)是根據(jù)先前的最佳估計(jì)做出的預(yù)測(cè),再加上對(duì)已知外部影響的校正。
新的不確定度是根據(jù)先前的不確定度做出的預(yù)測(cè),再加上來(lái)自環(huán)境額外的不確定度。
上述過(guò)程描繪了狀態(tài)預(yù)測(cè)過(guò)程,那么當(dāng)我們從傳感器中獲取一些測(cè)量數(shù)據(jù)時(shí)會(huì)發(fā)生什么呢?
狀態(tài)更新
利用測(cè)量進(jìn)一步修正狀態(tài)
假設(shè)我們有幾個(gè)傳感器,這些傳感器可以向我們提供有關(guān)系統(tǒng)狀態(tài)的信息。就目前而言,測(cè)量什么量都無(wú)關(guān)緊要,也許一個(gè)讀取位置,另一個(gè)讀取速度。每個(gè)傳感器都告訴我們有關(guān)狀態(tài)的一些間接信息(換句話說(shuō),傳感器在狀態(tài)下運(yùn)作并產(chǎn)生一組測(cè)量讀數(shù))。

請(qǐng)注意,測(cè)量的單位可能與狀態(tài)量的單位不同。我們使用矩陣對(duì)傳感器的測(cè)量進(jìn)行建模。
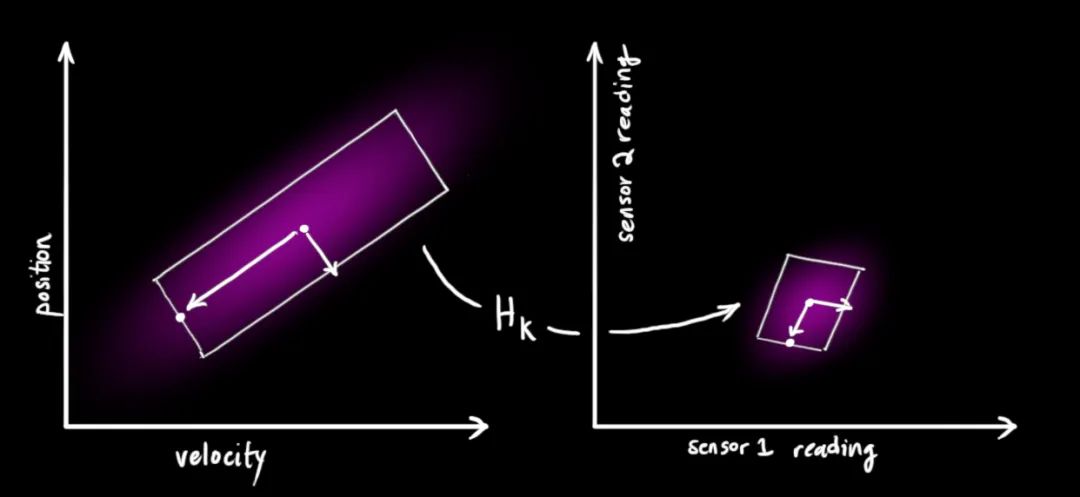
所以我們期望傳感器的度數(shù)可以被建模成如下形式:
卡爾曼濾波器的偉大之處就在于它能夠處理傳感器噪聲。換句話說(shuō),傳感器本身的測(cè)量是不準(zhǔn)確的,且原始估計(jì)中的每個(gè)狀態(tài)都可能導(dǎo)致一定范圍的傳感器讀數(shù),而卡爾曼濾波能夠在這些不確定性存在的情況下找到最優(yōu)的狀態(tài)。

根據(jù)傳感器的讀數(shù),我們會(huì)猜測(cè)系統(tǒng)正處于某個(gè)特定狀態(tài)。但是由于不確定性的存在,某些狀態(tài)比其他狀態(tài)更可能產(chǎn)生我們看到的讀數(shù):
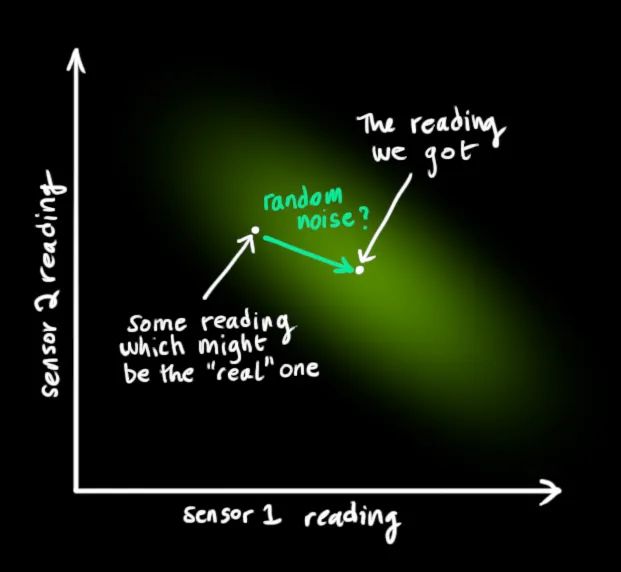
我們將這種不確定性(如傳感器噪聲)的協(xié)方差表示為,讀數(shù)的分布均值等于我們觀察到傳感器的讀數(shù),我們將其表示為
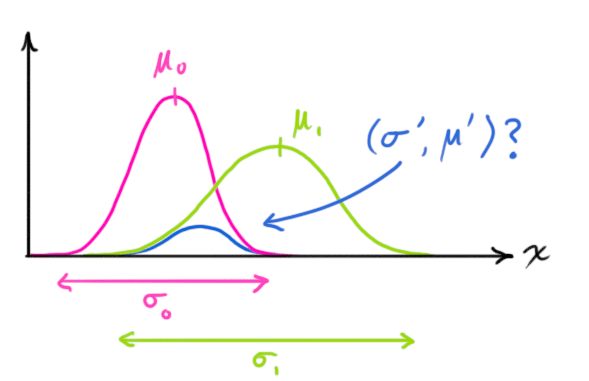
這樣一來(lái),我們有了兩個(gè)高斯分布:一個(gè)圍繞通過(guò)狀態(tài)轉(zhuǎn)移預(yù)測(cè)的平均值,另一個(gè)圍繞實(shí)際傳感器讀數(shù)。
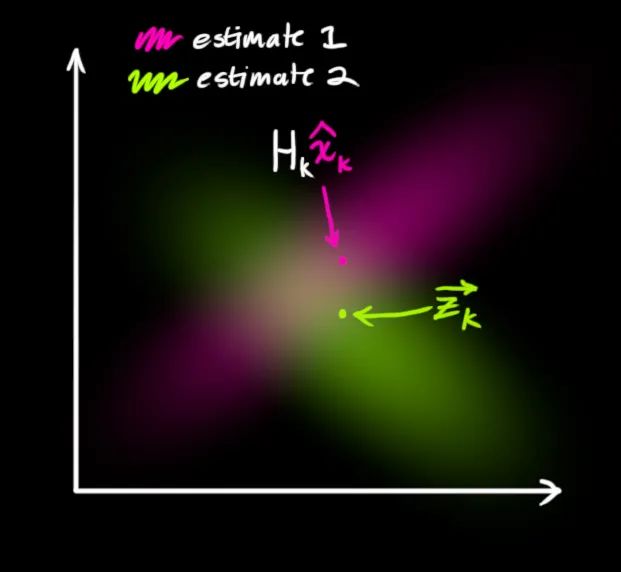
因此,我們需要將基于預(yù)測(cè)狀態(tài)(粉紅色)的推測(cè)讀數(shù)與基于實(shí)際觀察到的傳感器讀數(shù)(綠色)進(jìn)行融合。
那么融合后最有可能的新?tīng)顟B(tài)是什么?對(duì)于任何可能的讀數(shù),我們都有兩個(gè)相關(guān)的概率:(1)我們的傳感器讀數(shù)是的測(cè)量值的概率,以及(2)先前估計(jì)值的概率認(rèn)為是我們應(yīng)該看到的讀數(shù)。
如果我們有兩個(gè)概率,并且想知道兩個(gè)概率都為真的機(jī)會(huì),則將它們相乘。因此,我們對(duì)兩個(gè)高斯分布進(jìn)行了相乘處理:
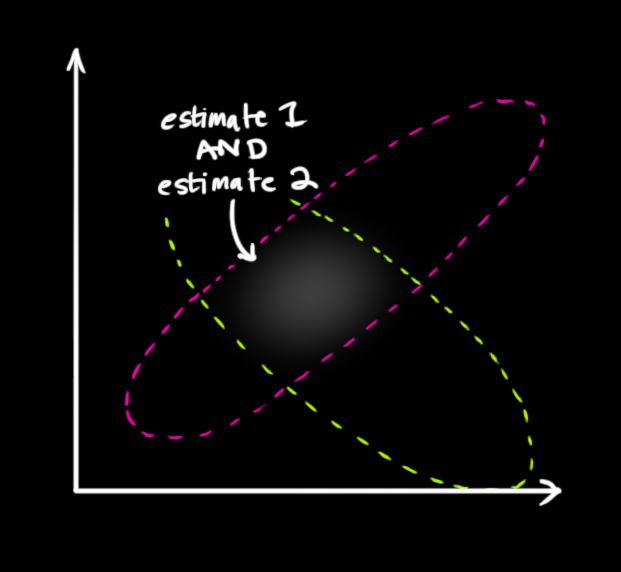
兩個(gè)概率分布相乘得到的就是上圖中的重疊部分。而且重疊部分的概率分布會(huì)比我們之前的任何一個(gè)估計(jì)值/讀數(shù)都精確得多,這個(gè)分布的均值就是兩種估計(jì)最有可能配置(得到的狀態(tài))。

事實(shí)證明,兩個(gè)獨(dú)立的高斯分布相乘之后會(huì)得到一個(gè)新的具有其均值和協(xié)方差矩陣的高斯分布!下面開(kāi)始推公式。
合并兩個(gè)高斯分布
首先考慮一維高斯情況:一個(gè)均值為,方差為的高斯分布的形式為:
我們想知道將兩個(gè)高斯曲線相乘會(huì)發(fā)生什么。下圖中的藍(lán)色曲線表示兩個(gè)高斯總體的(未歸一化)交集:
將公式(9)代入公式(10),我們可以得到新的高斯分布的均值和方差如下所示:
我們將其中的一小部分重寫(xiě)為:
這樣一來(lái),公式的形式就簡(jiǎn)單多了!我們順勢(shì)將公式(12)和(13)的矩陣形式寫(xiě)在下面:
其中表示新高斯分布的協(xié)方差矩陣,是每個(gè)維度的均值,就是大名鼎鼎的“卡爾曼增益”(Kalman gain)。
公式匯總
我們有兩個(gè)高斯分布,一個(gè)是我們預(yù)測(cè)的觀測(cè)
從公式(14)我們可以知道,卡爾曼增益是:
然后我們將公式(16)與公式(17)中的去除,同時(shí)將后面的去除,我們可以得到最終的化簡(jiǎn)形式的更新方程:
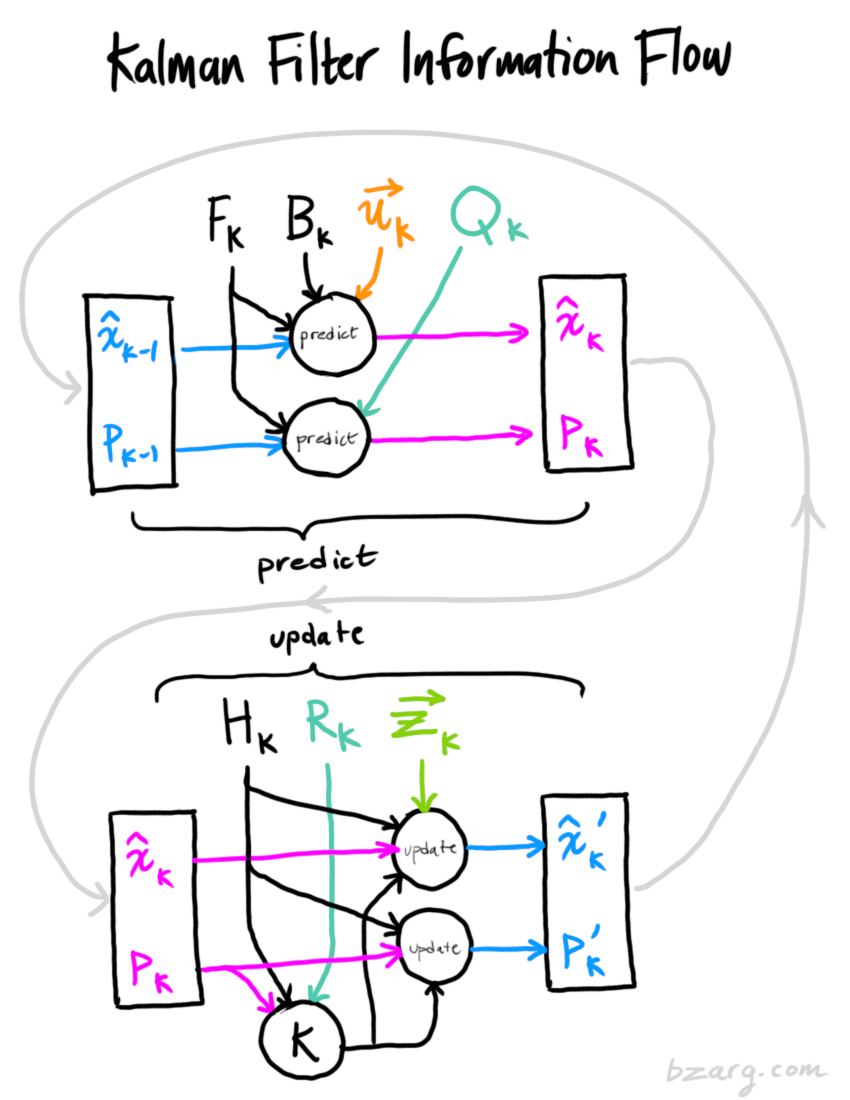
圖說(shuō)
大功告成,就是更新后的最優(yōu)狀態(tài)!接下來(lái)我們可以繼續(xù)進(jìn)行預(yù)測(cè),然后更新,重復(fù)上述過(guò)程!下圖給出卡爾曼濾波信息流。
總結(jié)
在上述所有數(shù)學(xué)公式中,你需要實(shí)現(xiàn)的只是公式(7)(18)和(19)。(或者,如果你忘記了這些,可以從等式(4)和(15)重新推導(dǎo)所有內(nèi)容。)
這將使你能夠準(zhǔn)確地對(duì)任何線性系統(tǒng)建模。對(duì)于非線性系統(tǒng),我們使用擴(kuò)展卡爾曼濾波器,該濾波器通過(guò)簡(jiǎn)單地線性化預(yù)測(cè)和測(cè)量值的均值進(jìn)行工作。
參考資料
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺(jué)、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱(chēng)+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺(jué)SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~