華為天才少年稚暉君自制硬萌機器人,開源 5 天,GitHub 收獲 2900 星!




「電子」機器人如何造?





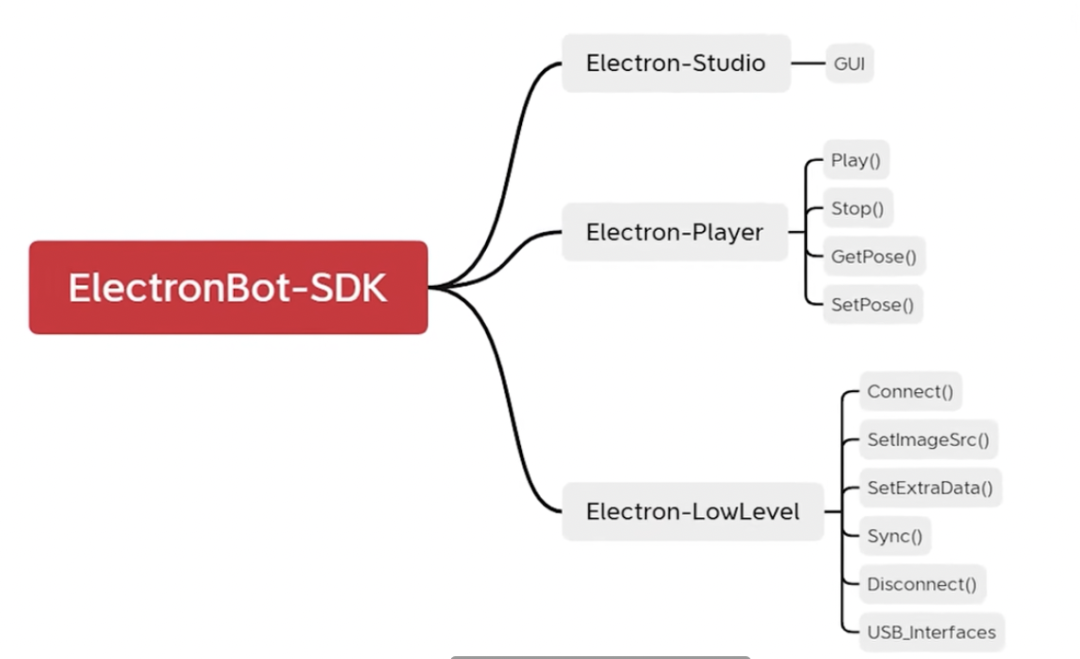

代碼開源
網(wǎng)友:重新定義「軟核」


參考資料:
版權(quán)申明:內(nèi)容來源網(wǎng)絡(luò),版權(quán)歸原創(chuàng)者所有。除非無法確認(rèn),都會標(biāo)明作者及出處,如有侵權(quán),煩請告知,我們會立即刪除并致歉!
評論
圖片
表情
<b id="afajh"><abbr id="afajh"></abbr></b>
 下載APP
下載APP「電子」機器人如何造?
代碼開源
網(wǎng)友:重新定義「軟核」
參考資料:
版權(quán)申明:內(nèi)容來源網(wǎng)絡(luò),版權(quán)歸原創(chuàng)者所有。除非無法確認(rèn),都會標(biāo)明作者及出處,如有侵權(quán),煩請告知,我們會立即刪除并致歉!
<b id="afajh"><abbr id="afajh"></abbr></b>