
OpenCV中泛洪填充算法解析與應(yīng)用
點擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時間送達(dá)

泛洪填充(Flood Fill)很多時候國內(nèi)的開發(fā)者稱它為漫水填充,該算法在圖形填充與著色應(yīng)用程序比較常見,屬于標(biāo)配。在圖像處理里對二值圖像的Hole可以通過泛洪填充來消除,這個是泛洪填充在圖像處理中很經(jīng)典的一個用途,此外還可以通過泛洪填充為ROI區(qū)域著色。這個在圖像處理也經(jīng)常用到。讓我們首先看一下泛洪填充算法本身,然后再說一下在圖像處理中的應(yīng)用場景。
?
通常泛洪填充需要從一個點開始,這個點可以隨機(jī)選擇的一點,但是一定要在填充區(qū)域內(nèi)部,然后它就會進(jìn)行四鄰域或者把鄰域?qū)ふ覍χ車袼赝瓿商畛洌钡接龅礁付S機(jī)點像素值不同的像素為止,也可以認(rèn)為是到達(dá)了區(qū)域邊界。通過鄰域像素尋找實現(xiàn)填充速度比較慢、不是泛洪填充好的實現(xiàn)方式,最常見與快速的泛紅實現(xiàn)是基于掃描線算法的,步驟如下:
1.首先從開始點出發(fā)進(jìn)行垂直方向列的掃描,填充
2.然后以填充點開始進(jìn)行每一行的掃描與填充
3.繼續(xù)以每一行新填充的像素為開始點,執(zhí)行1,2步驟
4.直到區(qū)域所有點都完成填充為止。
圖示如下:
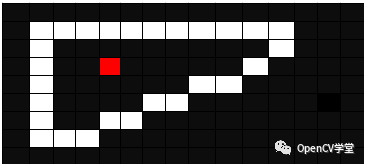
第一步:假設(shè)有圖像如下,紅色表種子像素點。
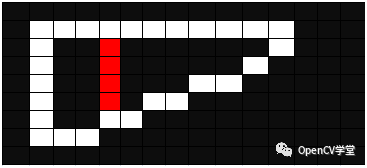
首先進(jìn)行豎直方向的掃描,填充結(jié)果如下:
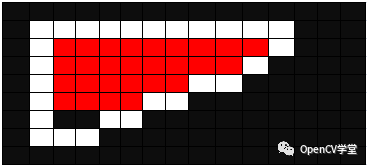
然后以填充的紅色像素為起始點,開始水平方向的掃描填充,結(jié)果如下:
用水平方向被填充像素點為種子像素點,繼續(xù)豎直方式掃描填充,結(jié)果如下:
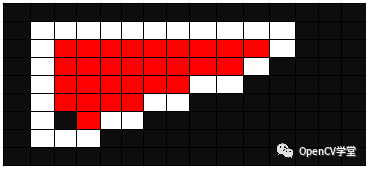
以填充的像素點為種子像素點繼續(xù)水平方向掃描,結(jié)果如下:
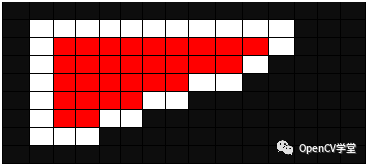
這樣就完成了對整個區(qū)域的填充。從上面的例子可以看出,泛洪填充可以通過遞歸方式編碼實現(xiàn),但是基于遞歸方式編碼實現(xiàn)有個致命的缺點,對大圖填充時候容易導(dǎo)致棧溢出,所以更常用的基于隊列或者棧的數(shù)據(jù)結(jié)構(gòu)實現(xiàn)非遞歸的泛洪填充。OpenCV中的實現(xiàn)主要是基于棧的掃描線算法實現(xiàn)泛洪填充。
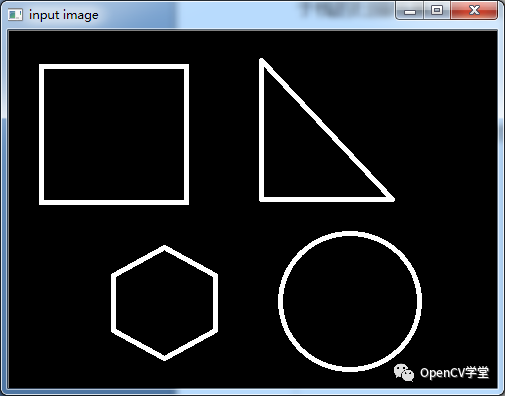
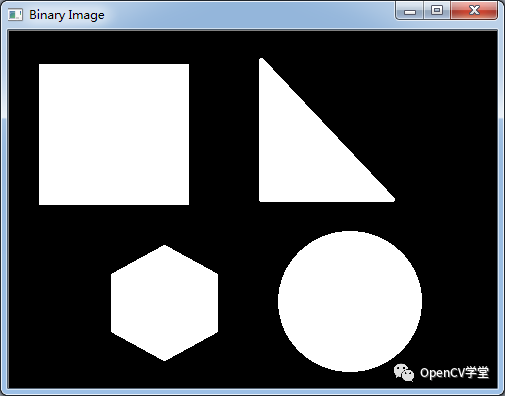
通過泛洪填充算法實現(xiàn)對二值圖像對象區(qū)域中Hole填充
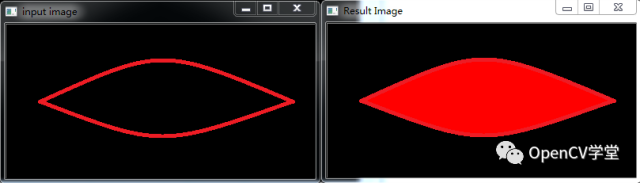
運行顯示原圖如下:
填充以后結(jié)果如下:
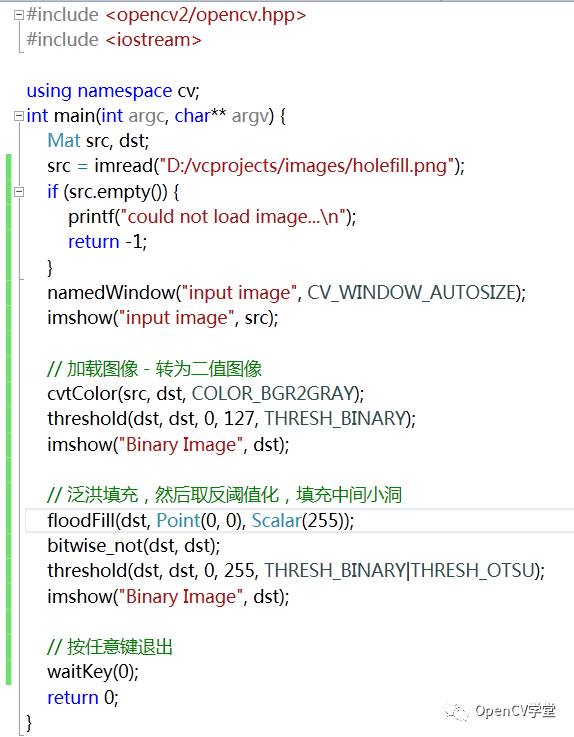
實現(xiàn)代碼如下:
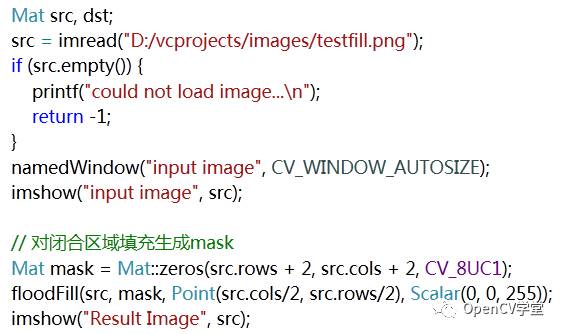
通過泛洪填充實現(xiàn)對ROI區(qū)域的著色, 跟上個例子使用API唯一不同地方是帶了mask參數(shù)。運行結(jié)果如下:
實現(xiàn)代碼如下:
交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動駕駛、計算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會逐漸細(xì)分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會根據(jù)研究方向邀請進(jìn)入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會請出群,謝謝理解~