
一文讀懂AGV的關(guān)鍵技術(shù)——激光SLAM與視覺SLAM的區(qū)別
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

移動(dòng)機(jī)器人(AGV)是工業(yè)機(jī)器人的一種。它由計(jì)算機(jī)控制,具有移動(dòng)、自動(dòng)導(dǎo)航、多傳感器控制、網(wǎng)絡(luò)交互等功能,在實(shí)際生產(chǎn)中最主要的用途是搬運(yùn),可以說只要有搬運(yùn)需求的地方,就有移動(dòng)機(jī)器人的應(yīng)用可能。

近年來,移動(dòng)機(jī)器人技術(shù)在世界范圍內(nèi)得到快速發(fā)展。人們致力于把移動(dòng)機(jī)器人應(yīng)用于各種場景中,從室內(nèi)外搬運(yùn)機(jī)器人,到服務(wù)型機(jī)器人,再到工業(yè)機(jī)器人等,移動(dòng)機(jī)器人的運(yùn)用都得到了巨大突破。
在移動(dòng)機(jī)器人研究中一個(gè)最關(guān)鍵的技術(shù)就是即時(shí)定位和建圖,也就是所謂的SLAM技術(shù)。SLAM它試圖解決這樣的問題:一個(gè)機(jī)器人在未知的環(huán)境中運(yùn)動(dòng),如何通過對環(huán)境的觀測確定自身的運(yùn)動(dòng)軌跡,同時(shí)構(gòu)建出環(huán)境的地圖。
SLAM技術(shù)正是為了實(shí)現(xiàn)這個(gè)目標(biāo)涉及到的諸多技術(shù)的總和。由于其重要的理論與應(yīng)用價(jià)值,被很多學(xué)者認(rèn)為是實(shí)現(xiàn)真正全自主移動(dòng)機(jī)器人的關(guān)鍵。
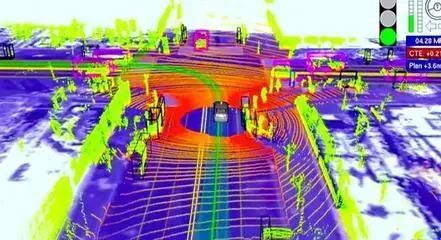
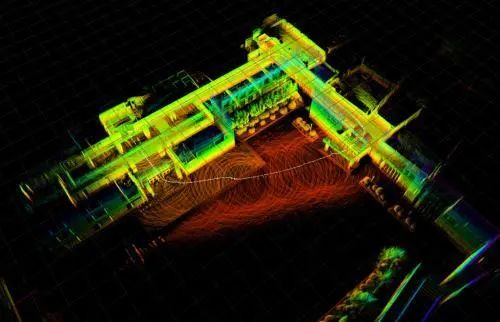
按照核心的功能模塊來區(qū)分,目前常見的移動(dòng)機(jī)器人SLAM系統(tǒng)一般具有兩種形式:基于激光雷達(dá)的SLAM(激光SLAM)和基于視覺的SLAM(Visual SLAM或VSLAM)。
那么激光SLAM與視覺SLAM到底有何不同呢?看下面這個(gè)表格就一目了然啦~
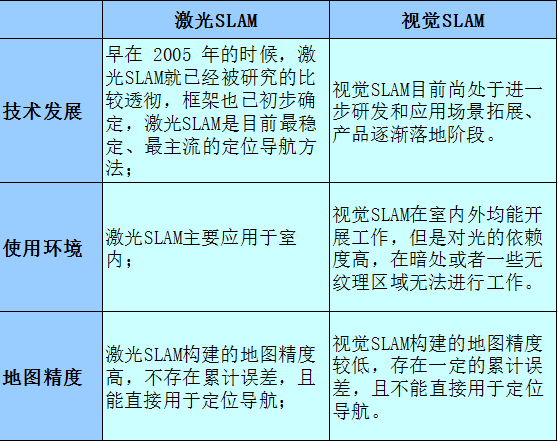
激光SLAM與視覺SLAM比較
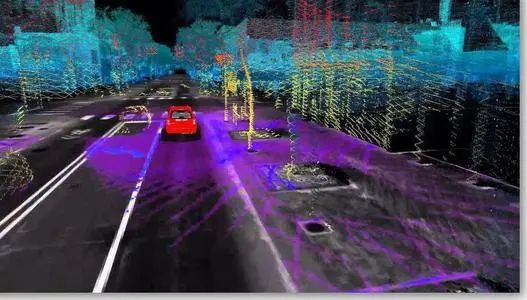
通過對比我們發(fā)現(xiàn),激光SLAM和視覺SLAM各擅勝場。兩者相較,激光 SLAM 構(gòu)建的地圖精度高,不存在累計(jì)誤差,且能直接用于定位導(dǎo)航。

當(dāng)然,激光SLAM也有一定的局限性。比如在又長又直、兩側(cè)是墻壁的長廊或是動(dòng)態(tài)變化大的環(huán)境中,單純依靠激光SLAM容易發(fā)生定位丟失的情況。
其實(shí),要想讓移動(dòng)機(jī)器人應(yīng)對各種復(fù)雜的使用場景,激光SLAM與視覺SLAM必將在相互競爭和融合中發(fā)展,多傳感器融合導(dǎo)航必然是未來發(fā)展方向。伴隨移動(dòng)機(jī)器人核心技術(shù)的解決,將替代人工完成簡單、重復(fù)、勞動(dòng)量大的繁雜工作,真正為人類服務(wù)。

好消息!
小白學(xué)視覺知識(shí)星球
開始面向外開放啦??????
下載1:OpenCV-Contrib擴(kuò)展模塊中文版教程 在「小白學(xué)視覺」公眾號(hào)后臺(tái)回復(fù):擴(kuò)展模塊中文教程,即可下載全網(wǎng)第一份OpenCV擴(kuò)展模塊教程中文版,涵蓋擴(kuò)展模塊安裝、SFM算法、立體視覺、目標(biāo)跟蹤、生物視覺、超分辨率處理等二十多章內(nèi)容。 下載2:Python視覺實(shí)戰(zhàn)項(xiàng)目52講 在「小白學(xué)視覺」公眾號(hào)后臺(tái)回復(fù):Python視覺實(shí)戰(zhàn)項(xiàng)目,即可下載包括圖像分割、口罩檢測、車道線檢測、車輛計(jì)數(shù)、添加眼線、車牌識(shí)別、字符識(shí)別、情緒檢測、文本內(nèi)容提取、面部識(shí)別等31個(gè)視覺實(shí)戰(zhàn)項(xiàng)目,助力快速學(xué)校計(jì)算機(jī)視覺。 下載3:OpenCV實(shí)戰(zhàn)項(xiàng)目20講 在「小白學(xué)視覺」公眾號(hào)后臺(tái)回復(fù):OpenCV實(shí)戰(zhàn)項(xiàng)目20講,即可下載含有20個(gè)基于OpenCV實(shí)現(xiàn)20個(gè)實(shí)戰(zhàn)項(xiàng)目,實(shí)現(xiàn)OpenCV學(xué)習(xí)進(jìn)階。 交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會(huì)逐漸細(xì)分),請掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會(huì)根據(jù)研究方向邀請進(jìn)入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會(huì)請出群,謝謝理解~