
激光點(diǎn)云濾波處理
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

文章導(dǎo)讀
點(diǎn)云濾波通常是點(diǎn)云預(yù)處理的第一步,只有將噪聲點(diǎn)、離群點(diǎn)、孔洞、數(shù)據(jù)壓縮等做相關(guān)處理后,才能更好地進(jìn)行特征提取、配準(zhǔn)、曲面重建、可視化等高階應(yīng)用,本文針對(duì)點(diǎn)云的幾種濾波器進(jìn)行分析和對(duì)比。
點(diǎn)云濾波的介紹
幾種常用濾波器
對(duì)比與總結(jié)
在獲取點(diǎn)云數(shù)據(jù)時(shí),由于設(shè)備精度、操作者經(jīng)驗(yàn)、環(huán)境因素等帶來的影響,點(diǎn)云數(shù)據(jù)中將不可避免地出現(xiàn)一些噪聲點(diǎn)。而濾波的作用就是利用數(shù)據(jù)的低頻特性剔除離群數(shù)據(jù),并進(jìn)行數(shù)據(jù)平滑或者提取特定頻段特征。
什么時(shí)候需要做點(diǎn)云濾波?
點(diǎn)云數(shù)據(jù)密度不規(guī)則需要平滑
因?yàn)檎趽醯葐栴}造成離群點(diǎn)需要去除
大量數(shù)據(jù)需要進(jìn)行下采樣
噪音數(shù)據(jù)需要去除
常用的點(diǎn)云濾波器包括以下幾種:
直通濾波器
條件濾波器
高斯濾波器
雙邊濾波器
體素濾波器
統(tǒng)計(jì)濾波器
半徑濾波器
頻率濾波器
從功能層面可以分為三類使用,直通和條件濾波用于預(yù)處理的最前端提取出感興趣區(qū)域;體素濾波用于對(duì)密集點(diǎn)云進(jìn)行下采樣減少數(shù)據(jù)量;其他濾波器用于平滑點(diǎn)云同時(shí)去除離散點(diǎn)。
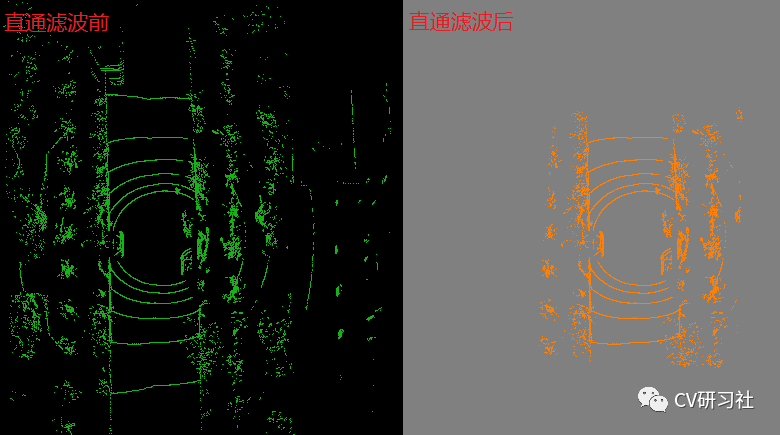
1. 直通濾波器
原理:在點(diǎn)云的指定維度上設(shè)置一個(gè)閾值范圍,將這個(gè)維度上的數(shù)據(jù)分為在閾值范圍內(nèi)與不在閾值范圍內(nèi),從而選擇過濾與否。能夠快速過濾掉用戶自定義區(qū)間范圍內(nèi)的點(diǎn)云。
在實(shí)際應(yīng)用中,由于激光掃描采集的距離較遠(yuǎn),但是根據(jù)功能需求的不同可能只關(guān)心一定區(qū)域內(nèi)的數(shù)據(jù),比如低速物流車的運(yùn)營場(chǎng)景,可能在X方向只關(guān)心前后60米,Y方向只關(guān)心左右20米的范圍。此時(shí)就可以利用直通濾波器提取出感興趣區(qū)域,可較快剔除部分點(diǎn)云,達(dá)到第一步粗處理的目的。
特點(diǎn):根據(jù)人工設(shè)定的先驗(yàn)范圍約束或者借助外部約束,直觀的縮小關(guān)注的空間范圍,減少后續(xù)計(jì)算量。
2. 條件濾波器
原理:通過設(shè)定濾波條件進(jìn)行濾波,類似于分段函數(shù),判斷點(diǎn)云是否在規(guī)則的范圍則中,如果不在則舍棄。上述的直通濾波器就是一種較簡單的條件濾波器。
如下圖所示:采用直通濾波器或者條件濾波器均能夠完成提取感興趣區(qū)域的功能。
3. 高斯濾波器
原理:采用加權(quán)平均方式的一種非線性濾波器,在指定域內(nèi)的權(quán)重是根據(jù)歐式距離的高斯分布,通過權(quán)重加權(quán)平均的方式得到當(dāng)前點(diǎn)的濾波后的點(diǎn)。
特點(diǎn):利用標(biāo)準(zhǔn)差去噪,適用于呈正態(tài)分布的數(shù)據(jù)平滑效果較好,但是邊緣角點(diǎn)也會(huì)被較大的平滑。
4. 雙邊濾波器
原理:通過取鄰近采樣點(diǎn)的加權(quán)平均來修正當(dāng)前采樣點(diǎn)的位置,在高斯濾波器只考慮空間域點(diǎn)的位置基礎(chǔ)上,增加了維度上的權(quán)重。一定程度上彌補(bǔ)了高斯濾波的缺點(diǎn)。
特點(diǎn):既有效地對(duì)空間三維模型表面進(jìn)行降噪,又可以保持點(diǎn)云數(shù)據(jù)中的幾何特征信息,避免三維點(diǎn)云數(shù)據(jù)被過渡光滑。但是只適用于有序點(diǎn)云。
5. 體素濾波器
原理:通過對(duì)輸入的點(diǎn)云數(shù)據(jù)創(chuàng)建一個(gè)三維體素柵格,然后在每個(gè)體素內(nèi),用體素中所有點(diǎn)的重心來近似顯示體素中的其他點(diǎn),這樣該體素內(nèi)所有點(diǎn)就用一個(gè)重心點(diǎn)最終表示。
也有另外一種相似的表達(dá)形式:利用每一個(gè)體素立方體的中心來近似該體素立方體內(nèi)的所有點(diǎn),相比上一種方法計(jì)算速度較快,但是損失了原始點(diǎn)云局部形態(tài)的精細(xì)度。
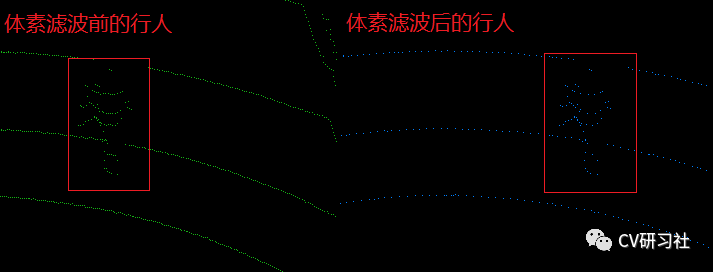
特點(diǎn):可以達(dá)到向下采樣同時(shí)不破壞點(diǎn)云本身幾何結(jié)構(gòu)的功能。點(diǎn)云幾何結(jié)構(gòu)不僅是宏觀的幾何外形,也包括其微觀的排列方式,比如橫向相似的尺寸,縱向相同的距離。隨機(jī)下采樣雖然效率比體素網(wǎng)格濾波器高,但會(huì)破壞點(diǎn)云微觀結(jié)構(gòu)。
如下圖所示:經(jīng)過體素網(wǎng)格下采樣后的行人,點(diǎn)云會(huì)變得更稀疏。主要是針對(duì)線束比較高的激光雷達(dá)或者多個(gè)雷達(dá)數(shù)據(jù)疊加時(shí),平滑點(diǎn)云間隔的情況使用。
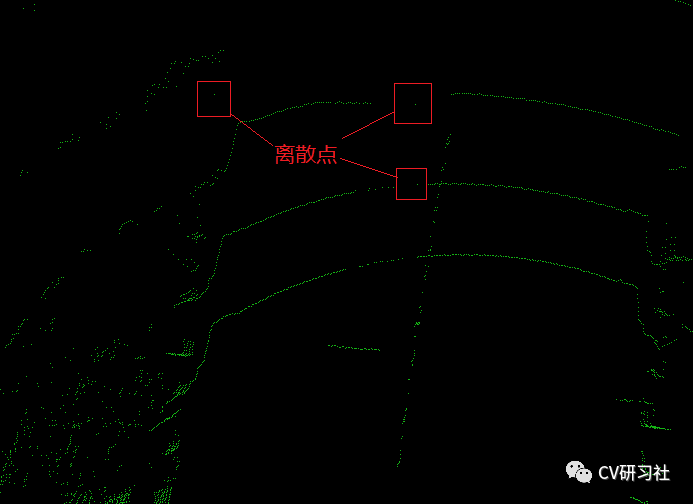
在將統(tǒng)計(jì)濾波器和半徑濾波器之前,提到一個(gè)離散群點(diǎn)的概念,那么什么是離散群點(diǎn)?
在獲取點(diǎn)云數(shù)據(jù)時(shí),由于受到外界干擾如視線遮擋,障礙物等因素的影響,點(diǎn)云數(shù)據(jù)中存在著一些距離主題點(diǎn)云較遠(yuǎn)的離散點(diǎn),即離散群點(diǎn)。
如下圖所示:由于設(shè)備采集或者障礙物遮擋等問題或?qū)е略谌S空間中出現(xiàn)零星的點(diǎn)集。
離散群點(diǎn)有什么影響?
離散群點(diǎn)會(huì)破壞點(diǎn)云的表達(dá)準(zhǔn)確性。使得局部點(diǎn)云特征(例如表面法線或曲率變化)的估計(jì)變得非常復(fù)雜,這往往導(dǎo)致錯(cuò)誤的估計(jì)結(jié)果,從而可能導(dǎo)致點(diǎn)云配準(zhǔn)失敗。
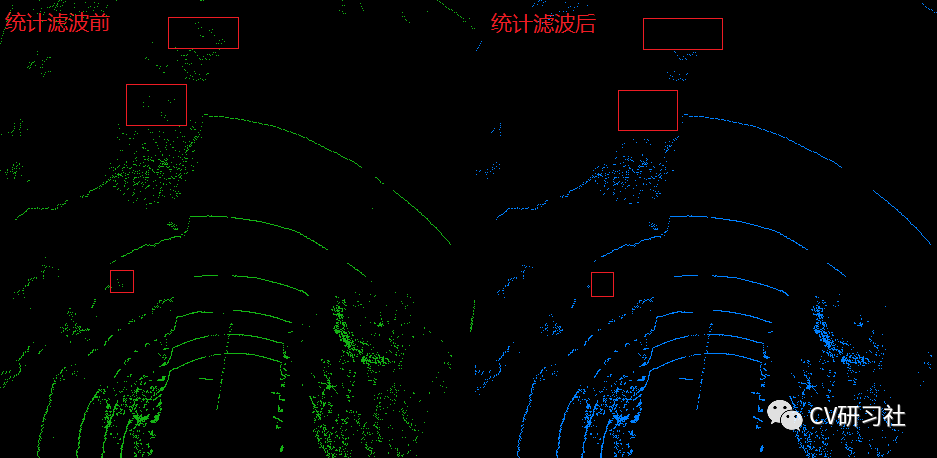
6. 統(tǒng)計(jì)濾波器
原理:對(duì)每個(gè)點(diǎn)的鄰域進(jìn)行一個(gè)統(tǒng)計(jì)分析,并修剪掉那些不符合一定標(biāo)準(zhǔn)的點(diǎn)。我們的稀疏離群點(diǎn)移除方法基于在輸入數(shù)據(jù)中對(duì)點(diǎn)到臨近點(diǎn)的距離分布的計(jì)算。
具體方法如下:
計(jì)算每個(gè)點(diǎn)到其最近的k個(gè)點(diǎn)平均距離,(假設(shè)得到的結(jié)果是一個(gè)高斯分布,其形狀是由均值和標(biāo)準(zhǔn)差決定),那么平均距離在標(biāo)準(zhǔn)范圍之外的點(diǎn),可以被定義為離群點(diǎn)并從數(shù)據(jù)中去除。
特點(diǎn):主要是根據(jù)密度去除離群點(diǎn),對(duì)密度差異較大的離群點(diǎn)去除效果較好。
7. 半徑濾波器
原理:與統(tǒng)計(jì)濾波器類似,只是操作更加暴力直觀,根據(jù)空間點(diǎn)半徑范圍臨近點(diǎn)數(shù)量來濾波。
具體方法如下:
在點(diǎn)云數(shù)據(jù)中以某點(diǎn)為中心畫一個(gè)圓計(jì)算落在該圓中點(diǎn)的數(shù)量,當(dāng)數(shù)量大于給定值時(shí),則保留該點(diǎn),數(shù)量小于給定值則剔除該點(diǎn)。此算法運(yùn)行速度快,依序迭代留下的點(diǎn)一定是最密集的,但是圓的半徑和圓內(nèi)點(diǎn)的數(shù)目都需要人工指定。
特點(diǎn):用于去除離群點(diǎn),在一定程度上可以用來篩選邊緣點(diǎn)。
如下圖所示:采用上述兩種濾波器可以提出掉零星的點(diǎn)集。
8. 頻率濾波器
原理:在點(diǎn)云處理中,點(diǎn)云法線向量差為點(diǎn)云所表達(dá)的信號(hào)。用點(diǎn)云的曲率來表示頻率信息,如果某處點(diǎn)云曲率大,則點(diǎn)云表達(dá)的是一個(gè)變化高頻的信號(hào)。如果點(diǎn)云曲率小,則點(diǎn)云表達(dá)的是一個(gè)不變低頻的信號(hào)。例如:地面曲率小,它表達(dá)的信息量也小;障礙物處曲率大,頻率就會(huì)更高。
以DoN算法為例,目的是在去除點(diǎn)云低頻濾波,低頻信息(例如建筑物墻面,地面)往往會(huì)對(duì)分割產(chǎn)生干擾,高頻信息(例如建筑物窗框,路面障礙錐)往往尺度上很小,直接采用基于臨近信息的濾波器會(huì)將此類信息合并至墻面或路面中。所以DoN算法利用了多尺度空間的思想。
具體如下:
在小尺度上計(jì)算點(diǎn)云法線1
在大尺度上計(jì)算點(diǎn)云法線2
法線1-法線2
濾去3中值較小的點(diǎn)
根據(jù)第三步得到的法線差,進(jìn)行歐式分割
特點(diǎn):在小尺度上是可以對(duì)高頻信息進(jìn)行檢測(cè)的,可以很好的小尺度高頻信息。其在大規(guī)模點(diǎn)云中優(yōu)勢(shì)尤其明顯。
濾波器主要是通過局部計(jì)算的方式,獲得一個(gè)響應(yīng)值,然后根據(jù)響應(yīng)值調(diào)整點(diǎn)云,比如位置調(diào)整,保留或刪除某點(diǎn)。
當(dāng)一種濾波無法完整達(dá)到預(yù)處理要求時(shí),可以通過組裝多個(gè)濾波器達(dá)到更復(fù)雜的功能。比如小編在實(shí)際應(yīng)用中借助于車輛運(yùn)動(dòng)軌跡和路沿檢測(cè)作為感興趣區(qū)域的先驗(yàn)知識(shí)進(jìn)行直通濾波;接著根據(jù)激光雷達(dá)的線束多少調(diào)整統(tǒng)計(jì)濾波參數(shù)過濾離群點(diǎn);由于使用了兩顆激光雷達(dá)做數(shù)據(jù)拼接,最后通過體素降采樣平滑點(diǎn)的間隔。
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺SLAM“。請(qǐng)按照格式備注,否則不予通過。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~