
中秋福利!領(lǐng)取所有視頻干貨教程(自動駕駛+三維重建+點云處理+視覺/激光SLAM)
現(xiàn)有課程分為小專欄和大專欄系列,其中小專欄為單個系列課程,大專欄將領(lǐng)域相關(guān)所有課程匯總(SLAM全棧系列、三維重建全棧系列、3D視覺全棧系列)。以下是所有課程介紹(按方向劃分、掃描8折優(yōu)惠券碼可進(jìn)一步了解課程):
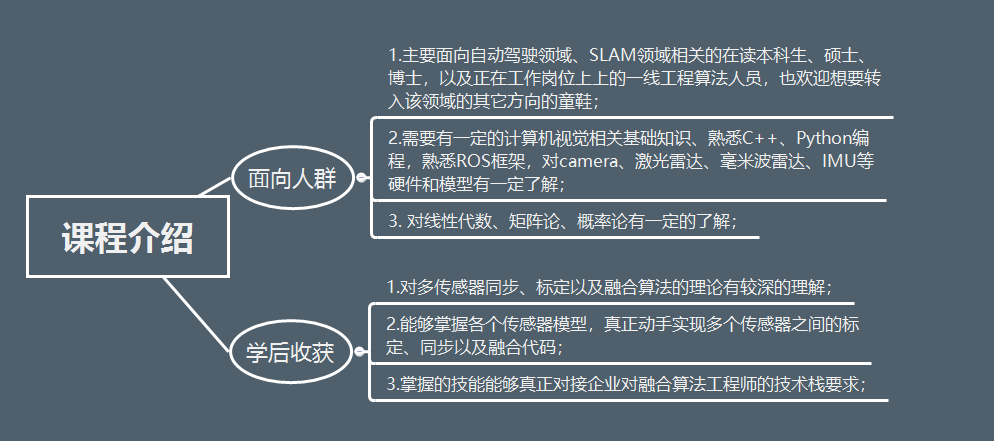
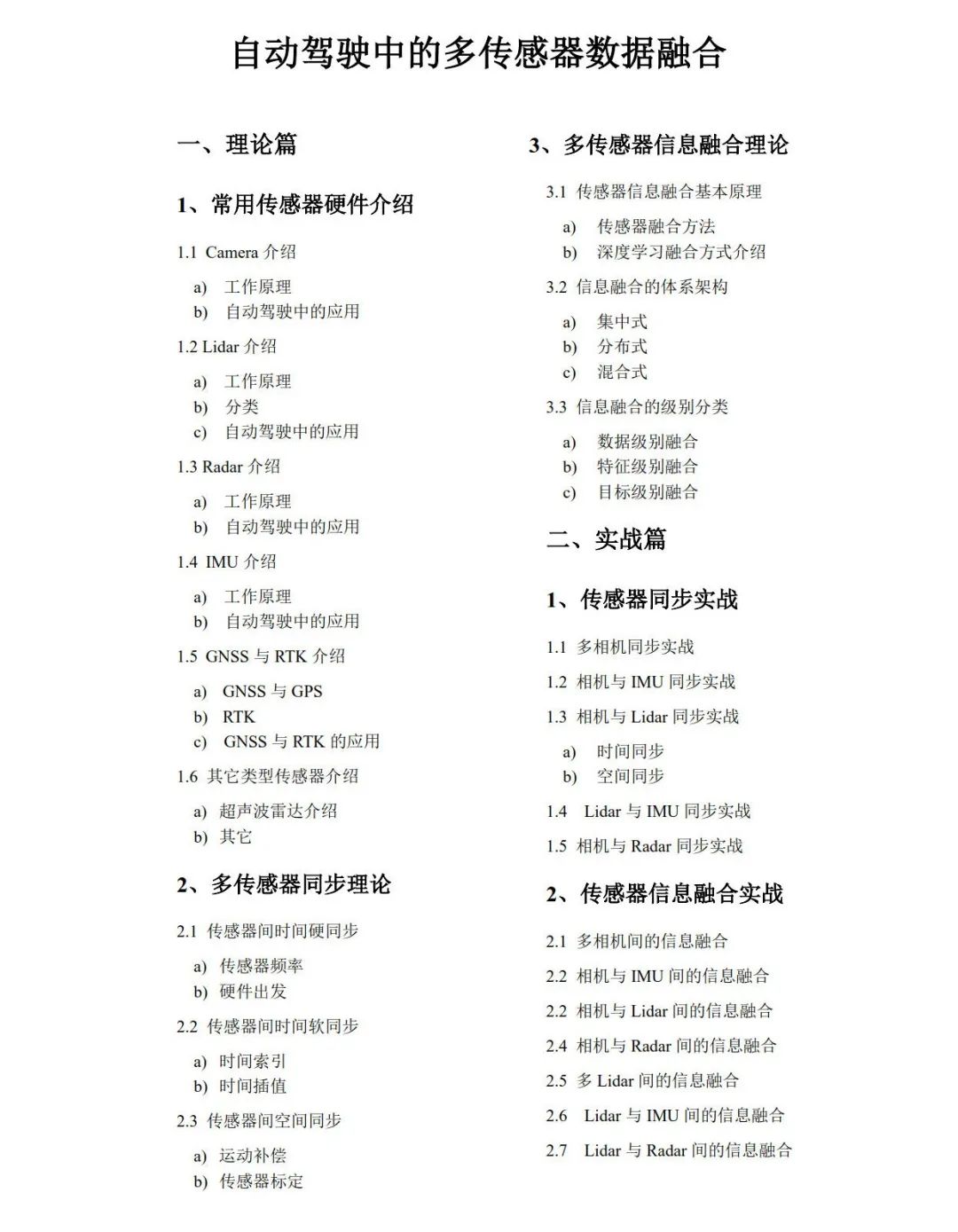
課程鏈接:國內(nèi)首個面向自動駕駛領(lǐng)域的多傳感器數(shù)據(jù)融合系統(tǒng)課程
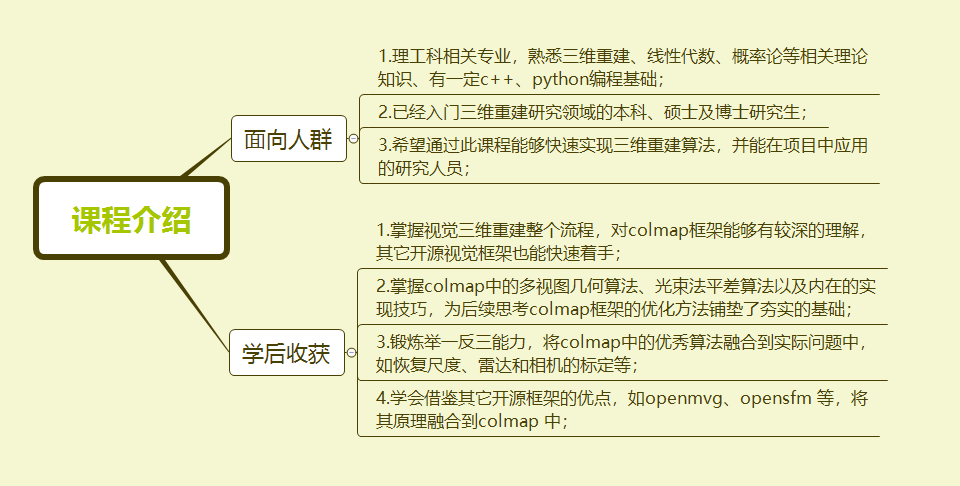
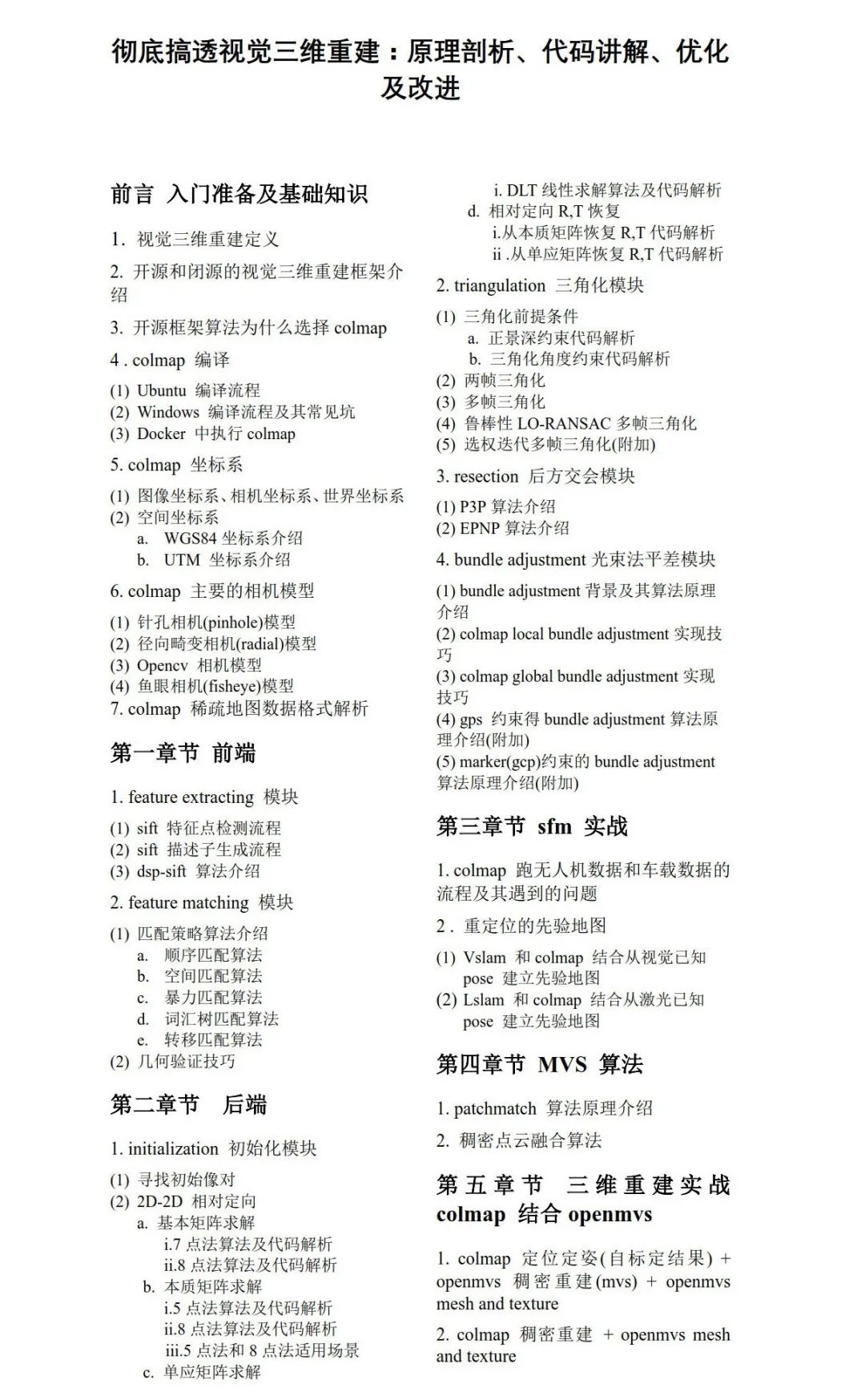
視覺三維重建
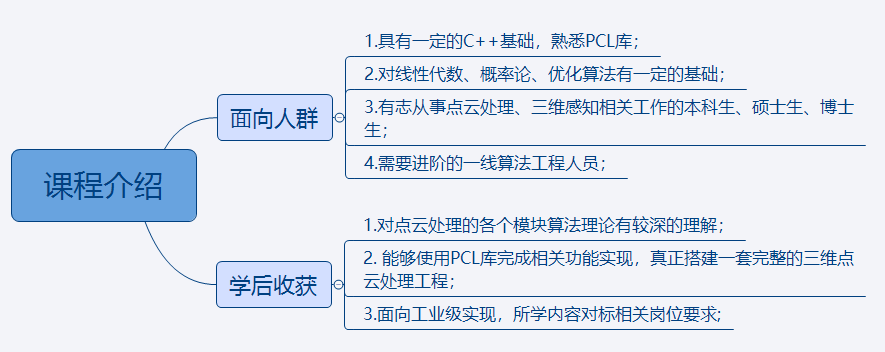
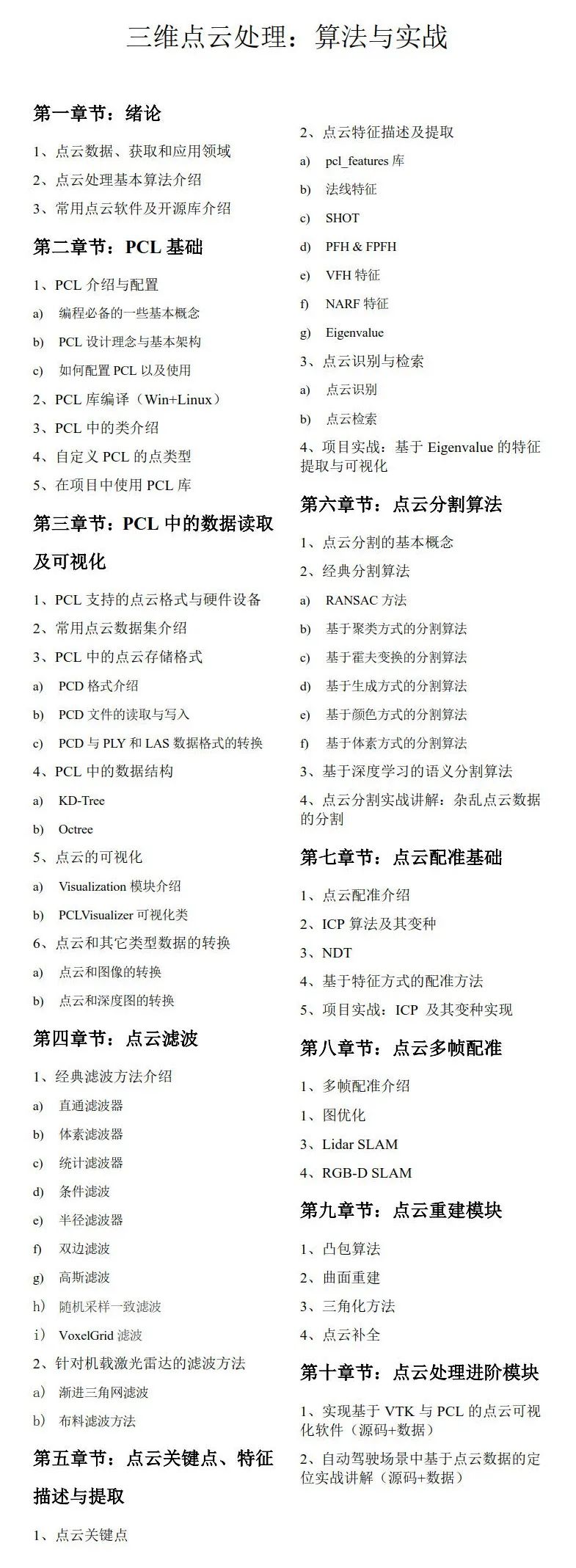
點云處理
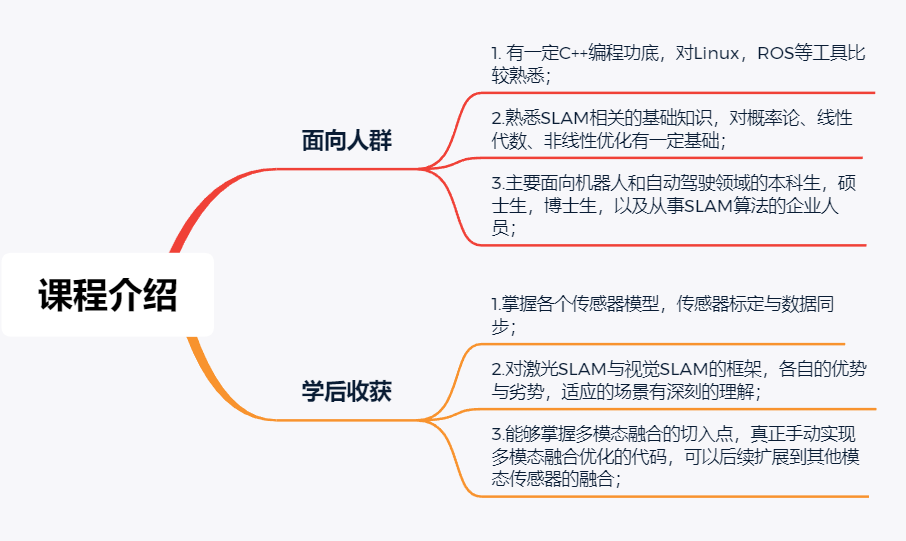
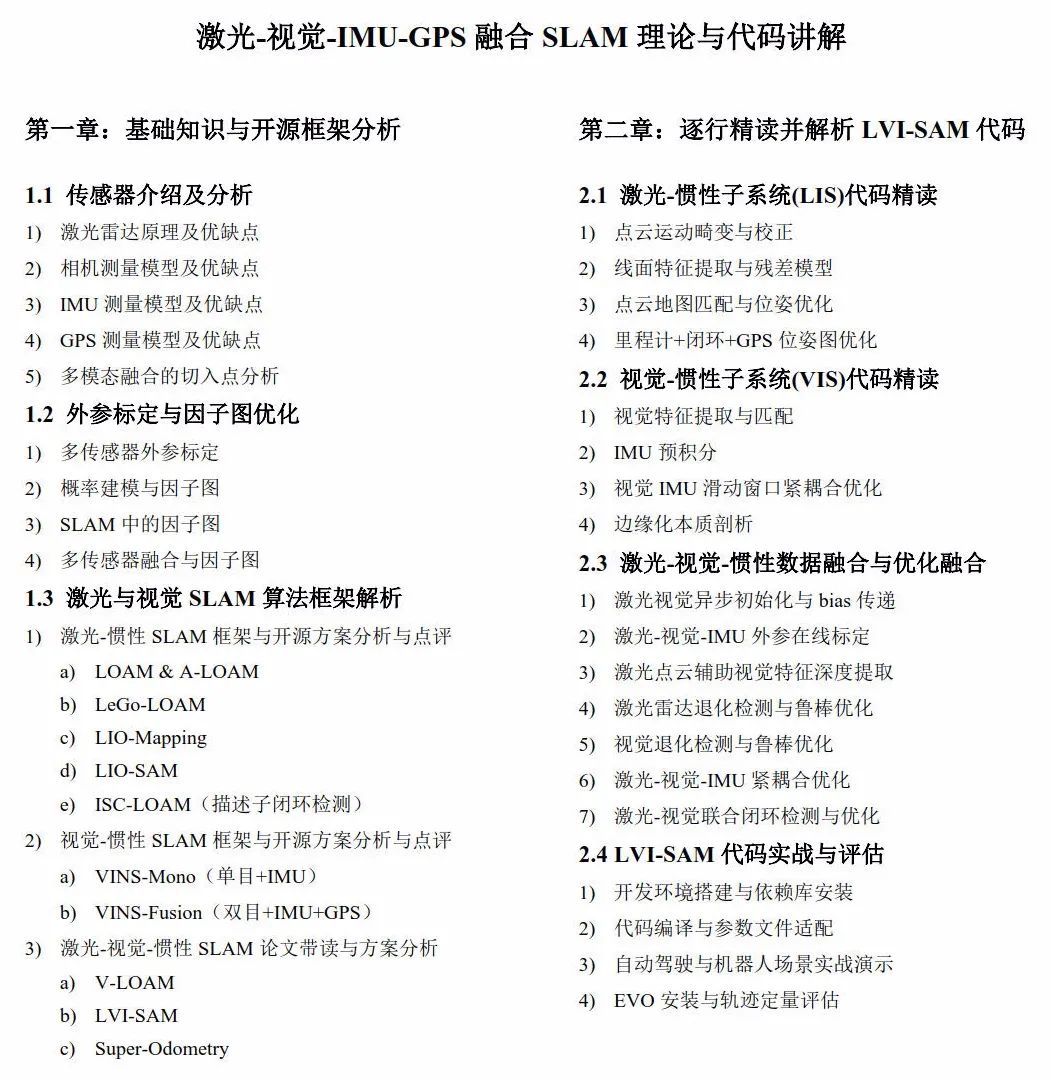
激光-視覺-IMU-GPS融合SLAM理論與代碼講解
課程鏈接:徹底剖析激光-視覺-IMU-GPS融合SLAM算法:理論推導(dǎo)、代碼講解和實戰(zhàn)
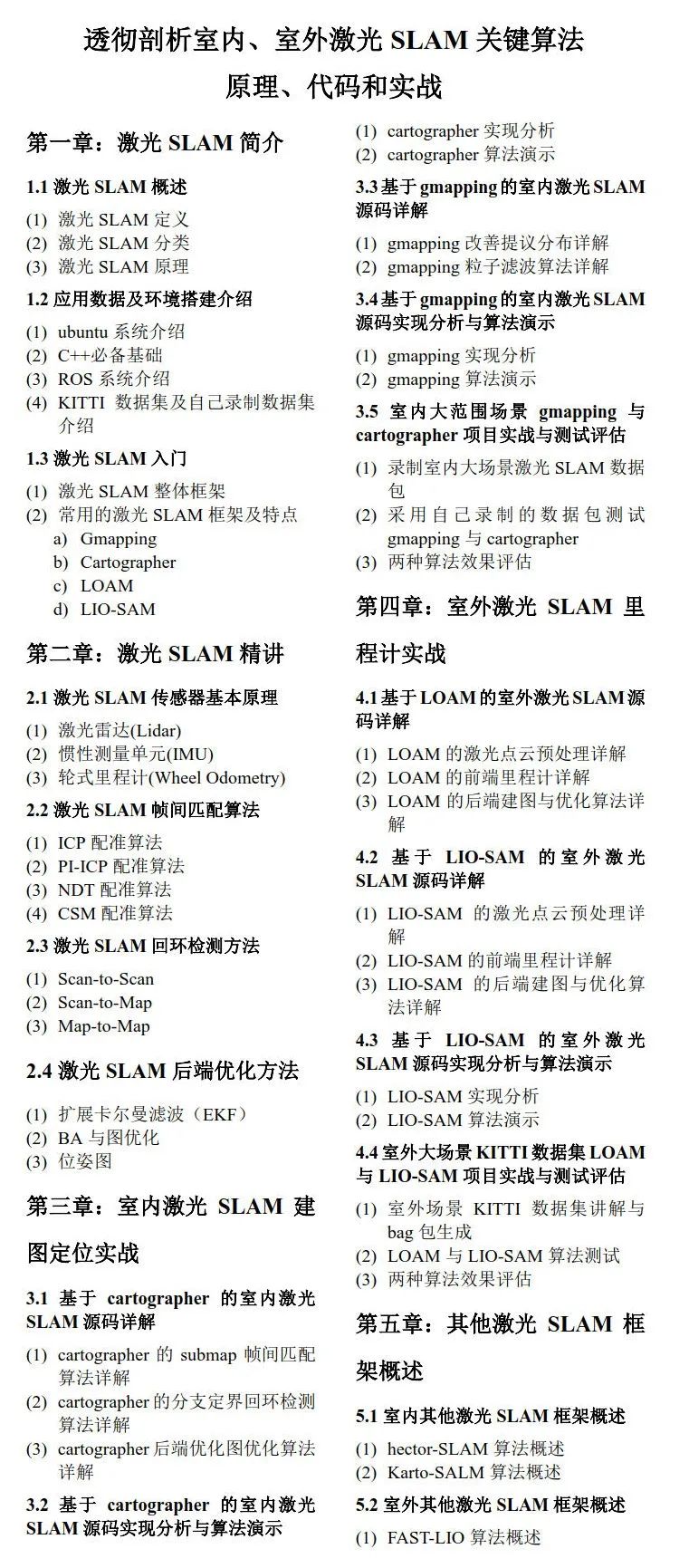
透徹剖析室內(nèi)、室外激光SLAM關(guān)鍵算法原理、代碼和實戰(zhàn)
課程鏈接:徹底剖析室內(nèi)、室外激光SLAM關(guān)鍵算法原理、代碼和實戰(zhàn)(cartographer+LOAM+LIO-SAM)
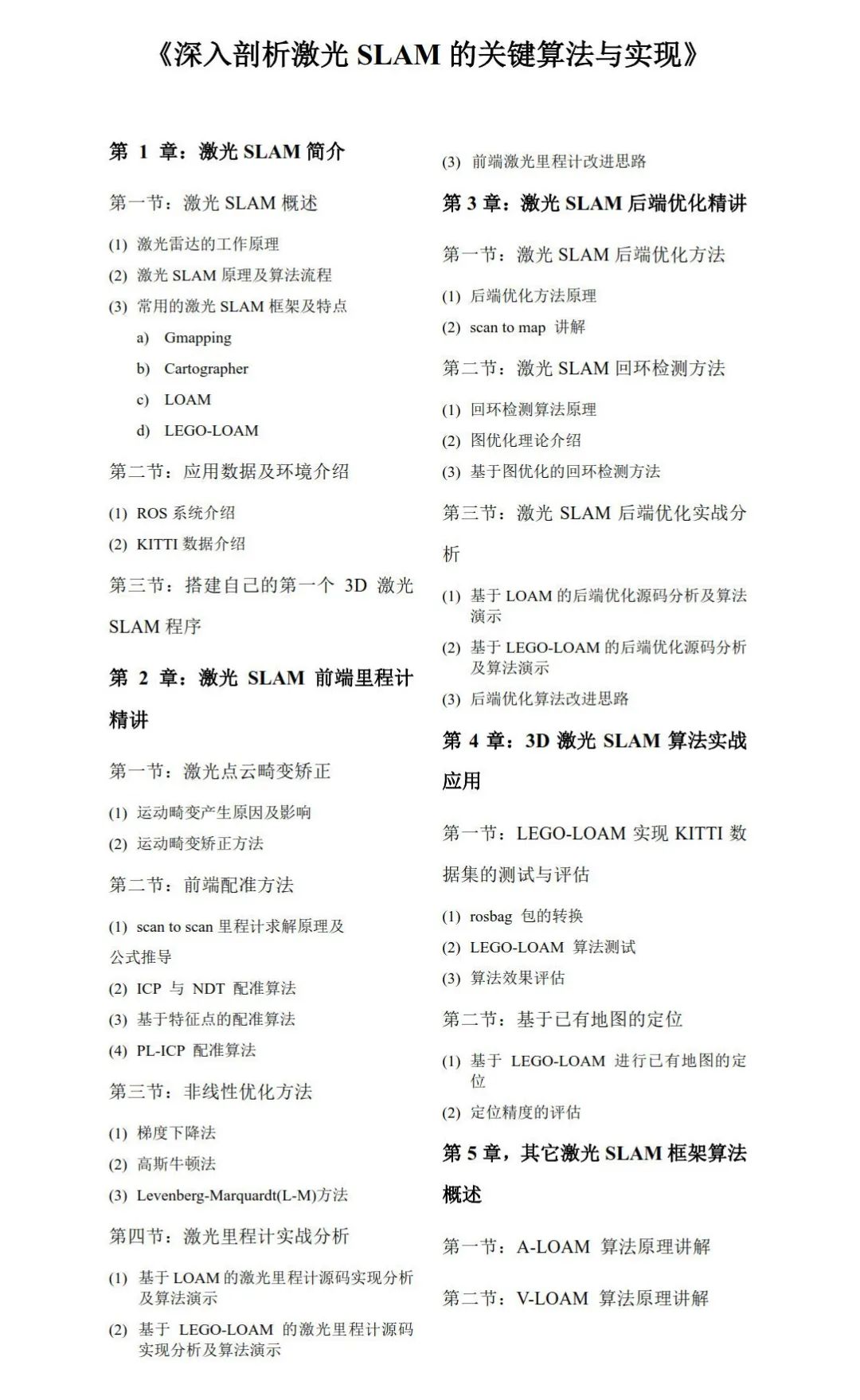
深入剖析激光SLAM的關(guān)鍵算法與實現(xiàn)
課程鏈接:深入剖析激光SLAM的關(guān)鍵算法與源碼實現(xiàn)
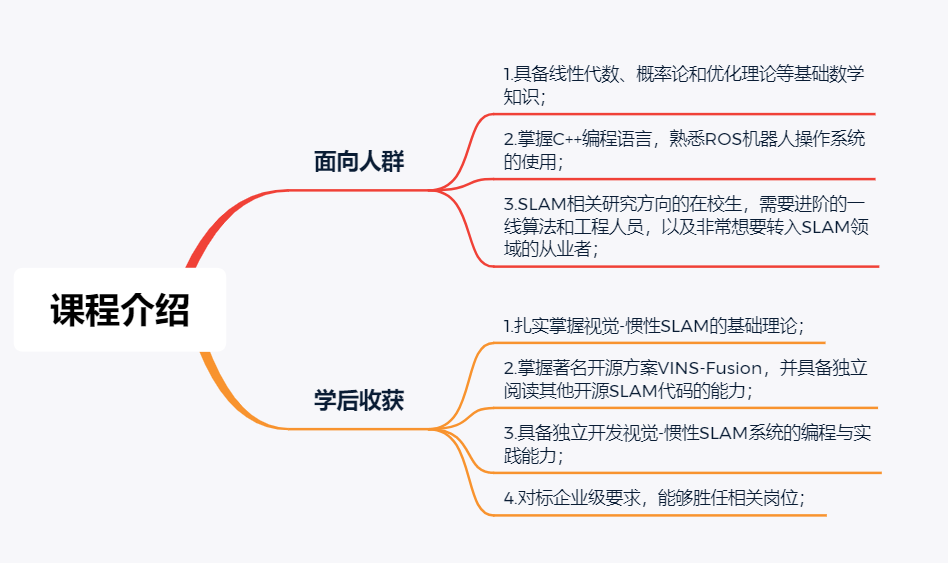
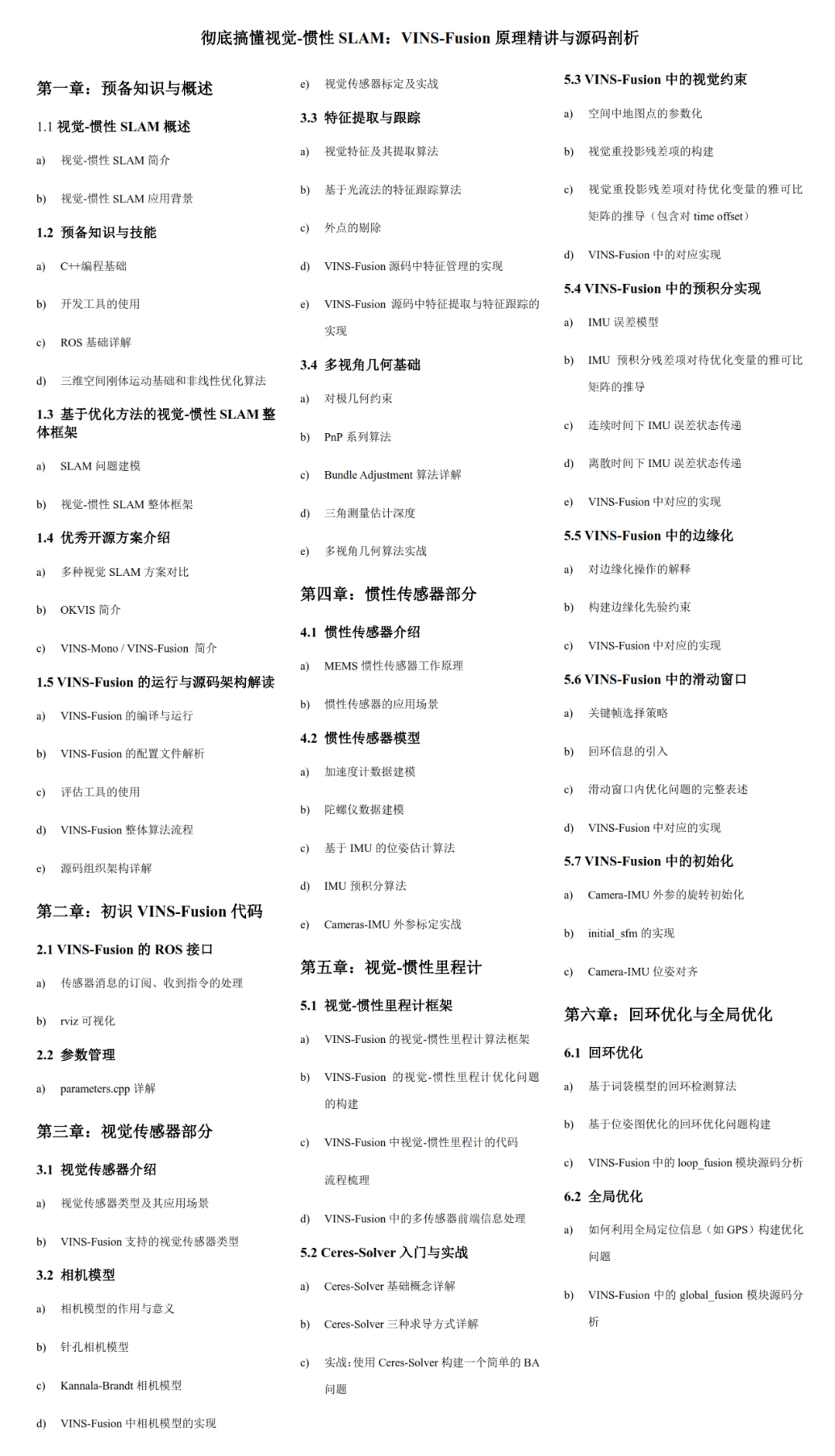
視覺-慣性SLAM入門與實踐
課程鏈接:徹底搞懂視覺-慣性SLAM:基于VINS-Fusion正式開課啦
評論
圖片
表情