一文看盡深度學(xué)習(xí)中的15種損失函數(shù)

極市導(dǎo)讀
本文詳細(xì)介紹了深度學(xué)習(xí)中的各種損失函數(shù)的優(yōu)點(diǎn)和局限性。 >>加入極市CV技術(shù)交流群,走在計(jì)算機(jī)視覺的最前沿
在機(jī)器學(xué)習(xí)中,損失函數(shù)是代價(jià)函數(shù)的一部分,而代價(jià)函數(shù)則是目標(biāo)函數(shù)的一種類型[1]。
Loss function,即損失函數(shù):用于定義單個(gè)訓(xùn)練樣本與真實(shí)值之間的誤差;
Cost function,即代價(jià)函數(shù):用于定義單個(gè)批次/整個(gè)訓(xùn)練集樣本與真實(shí)值之間的誤差;
Objective function,即目標(biāo)函數(shù):泛指任意可以被優(yōu)化的函數(shù)。
損失函數(shù)是用于衡量模型所作出的預(yù)測離真實(shí)值(Ground Truth)之間的偏離程度。通常,我們都會(huì)最小化目標(biāo)函數(shù),最常用的算法便是“梯度下降法”(Gradient Descent)。俗話說,任何事情必然有它的兩面性,因此,并沒有一種萬能的損失函數(shù)能夠適用于所有的機(jī)器學(xué)習(xí)任務(wù),所以在這里我們需要知道每一種損失函數(shù)的優(yōu)點(diǎn)和局限性,才能更好的利用它們?nèi)ソ鉀Q實(shí)際的問題。損失函數(shù)大致可分為兩種:回歸損失(針對連續(xù)型變量)和分類損失(針對離散型變量)。
1. 回歸損失(Regression Loss)
-
L1 Loss
也稱為Mean Absolute Error,即平均絕對誤差(MAE),它衡量的是預(yù)測值與真實(shí)值之間距離的平均誤差幅度,作用范圍為0到正無窮。
優(yōu)點(diǎn): 收斂速度快,能夠?qū)μ荻冉o予合適的懲罰權(quán)重,而不是“一視同仁”,使梯度更新的方向可以更加精確。
缺點(diǎn): 對異常值十分敏感,梯度更新的方向很容易受離群點(diǎn)所主導(dǎo),不具備魯棒性。
-
L2 Loss
也稱為Mean Squred Error,即均方差(MSE),它衡量的是預(yù)測值與真實(shí)1值之間距離的平方和,作用范圍同為0到正無窮。
優(yōu)點(diǎn): 對離群點(diǎn)(Outliers)或者異常值更具有魯棒性。
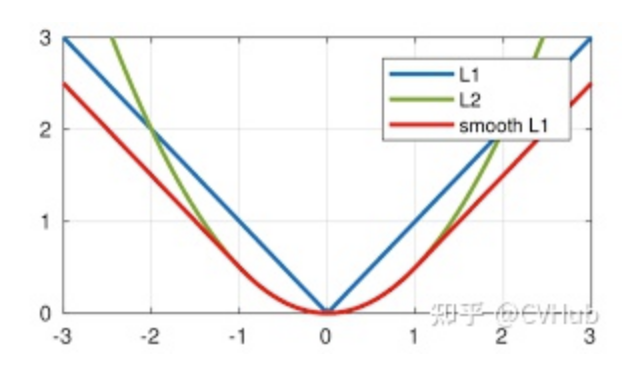
缺點(diǎn): 由圖可知其在0點(diǎn)處的導(dǎo)數(shù)不連續(xù),使得求解效率低下,導(dǎo)致收斂速度慢;而對于較小的損失值,其梯度也同其他區(qū)間損失值的梯度一樣大,所以不利于網(wǎng)絡(luò)的學(xué)習(xí)。
對于L1范數(shù)和L2范數(shù),如果異常值對于實(shí)際業(yè)務(wù)非常重要,我們可以使用MSE作為我們的損失函數(shù);另一方面,如果異常值僅僅表示損壞的數(shù)據(jù),那我們應(yīng)該選擇MAE作為損失函數(shù)。此外,考慮到收斂速度,在大多數(shù)的卷積神經(jīng)網(wǎng)絡(luò)中(CNN)中,我們通常會(huì)選擇L2損失。但是,還存在這樣一種情形,當(dāng)你的業(yè)務(wù)數(shù)據(jù)中,存在95%的數(shù)據(jù)其真實(shí)值為1000,而剩下5%的數(shù)據(jù)其真實(shí)值為10時(shí),如果你使用MAE去訓(xùn)練模型,則訓(xùn)練出來的模型會(huì)偏向于將所有輸入數(shù)據(jù)預(yù)測成1000,因?yàn)镸AE對離群點(diǎn)不敏感,趨向于取中值。而采用MSE去訓(xùn)練模型時(shí),訓(xùn)練出來的模型會(huì)偏向于將大多數(shù)的輸入數(shù)據(jù)預(yù)測成10,因?yàn)樗鼘﹄x群點(diǎn)異常敏感。因此,大多數(shù)情況這兩種回歸損失函數(shù)并不適用,能否有什么辦法可以同時(shí)利用這兩者的優(yōu)點(diǎn)呢?
-
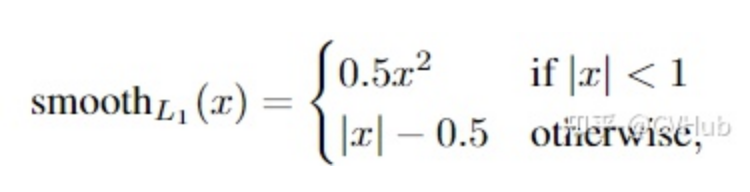
Smooth L1 Loss
即平滑的L1損失(SLL),出自Fast RCNN [7]。SLL通過綜合L1和L2損失的優(yōu)點(diǎn),在0點(diǎn)處附近采用了L2損失中的平方函數(shù),解決了L1損失在0點(diǎn)處梯度不可導(dǎo)的問題,使其更加平滑易于收斂。此外,在|x|>1的區(qū)間上,它又采用了L1損失中的線性函數(shù),使得梯度能夠快速下降。
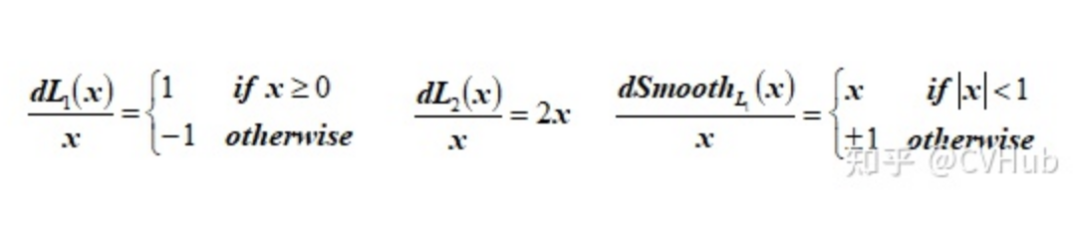
通過對這三個(gè)損失函數(shù)進(jìn)行求導(dǎo)可以發(fā)現(xiàn),L1損失的導(dǎo)數(shù)為常數(shù),如果不及時(shí)調(diào)整學(xué)習(xí)率,那么當(dāng)值過小時(shí),會(huì)導(dǎo)致模型很難收斂到一個(gè)較高的精度,而是趨向于一個(gè)固定值附近波動(dòng)。反過來,對于L2損失來說,由于在訓(xùn)練初期值較大時(shí),其導(dǎo)數(shù)值也會(huì)相應(yīng)較大,導(dǎo)致訓(xùn)練不穩(wěn)定。最后,可以發(fā)現(xiàn)Smooth L1在訓(xùn)練初期輸入數(shù)值較大時(shí)能夠較為穩(wěn)定在某一個(gè)數(shù)值,而在后期趨向于收斂時(shí)也能夠加速梯度的回傳,很好的解決了前面兩者所存在的問題。
-
IoU Loss
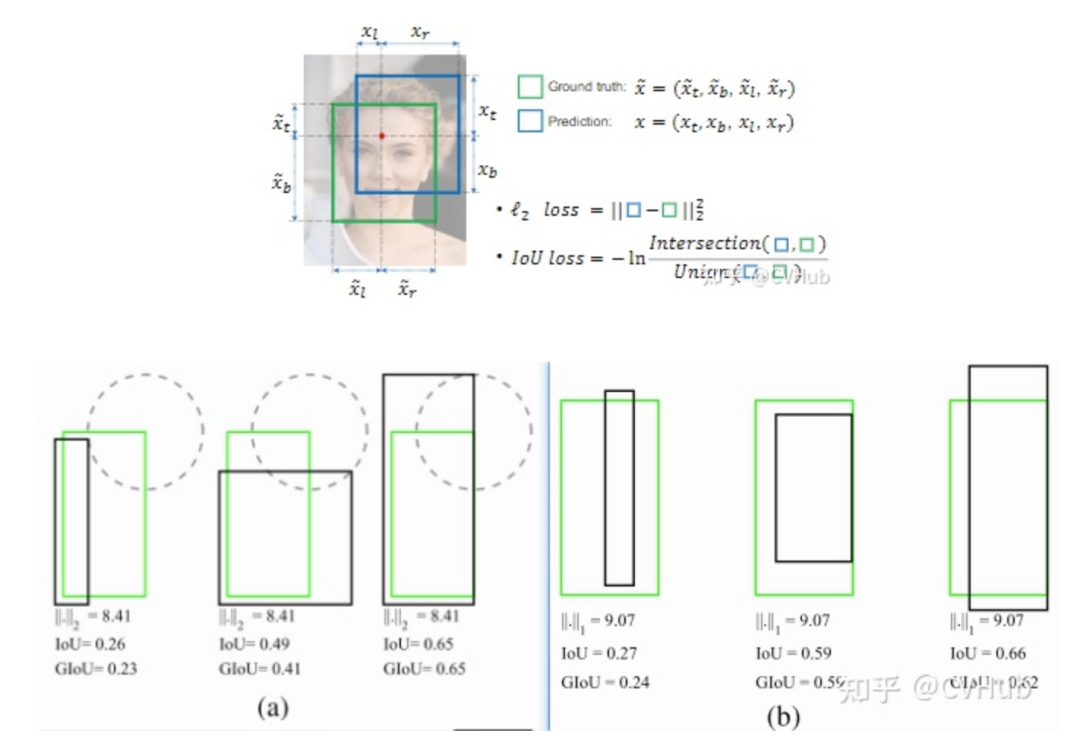
即交并比損失,出自UnitBox [8],由曠視科技于ACM2016首次提出。常規(guī)的Lx損失中,都是基于目標(biāo)邊界中的4個(gè)坐標(biāo)點(diǎn)信息之間分別進(jìn)行回歸損失計(jì)算的。因此,這些邊框信息之間是相互獨(dú)立的。然而,直觀上來看,這些邊框信息之間必然是存在某種相關(guān)性的。如下圖(a)-(b)分別所示,綠色框代表Ground Truth,黑色框代表Prediction,可以看出,同一個(gè)Lx分?jǐn)?shù),預(yù)測框與真實(shí)框之間的擬合/重疊程度并不相同,顯然重疊度越高的預(yù)測框是越合理的。IoU損失將候選框的四個(gè)邊界信息作為一個(gè)整體進(jìn)行回歸,從而實(shí)現(xiàn)準(zhǔn)確、高效的定位,具有很好的尺度不變性。為了解決IoU度量不可導(dǎo)的現(xiàn)象,引入了負(fù)Ln范數(shù)來間接計(jì)算IoU損失。
-
GIoU Loss
即泛化的IoU損失,全稱為Generalized Intersection over Union,由斯坦福學(xué)者于CVPR2019年發(fā)表的這篇論文(https://arxiv.org/abs/1902.09630) [9]中首次提出。上面我們提到了IoU損失可以解決邊界框坐標(biāo)之間相互獨(dú)立的問題,考慮這樣一種情況,當(dāng)預(yù)測框與真實(shí)框之間沒有任何重疊時(shí),兩個(gè)邊框的交集(分子)為0,此時(shí)IoU損失為0,因此IoU無法算出兩者之間的距離(重疊度)。另一方面,由于IoU損失為零,意味著梯度無法有效地反向傳播和更新,即出現(xiàn)梯度消失的現(xiàn)象,致使網(wǎng)絡(luò)無法給出一個(gè)優(yōu)化的方向。此外,如下圖所示,IoU對不同方向的邊框?qū)R也是一臉懵逼的,所計(jì)算出來的值都一樣。

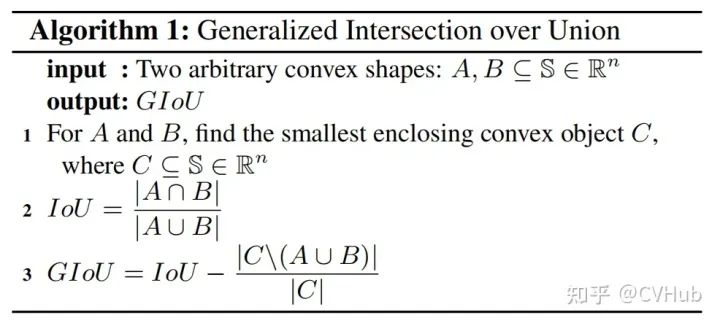
為了解決以上的問題,如下圖公式所示,GIoU通過計(jì)算任意兩個(gè)形狀(這里以矩形框?yàn)槔〢和B的一個(gè)最小閉合凸面C,然后再計(jì)算C中排除掉A和B后的面積占C原始面積的比值,最后再用原始的IoU減去這個(gè)比值得到泛化后的IoU值。
GIoU具有IoU所擁有的一切特性,如對稱性,三角不等式等。GIoU ≤ IoU,特別地,0 ≤ IoU(A, B) ≤ -1, 而0 ≤ GIoU(A, B) ≤ -1;當(dāng)兩個(gè)邊框的完全重疊時(shí),此時(shí)GIoU = IoU = 1. 而當(dāng) |AUB| 與 最小閉合凸面C 的比值趨近為0時(shí),即兩個(gè)邊框不相交的情況下,此時(shí)GIoU將漸漸收斂至 -1. 同樣地,我們也可以通過一定的方式去計(jì)算出兩個(gè)矩形框之間的GIoU損失,具體計(jì)算步驟也非常簡單,詳情參考原論文。
-
DIoU Loss
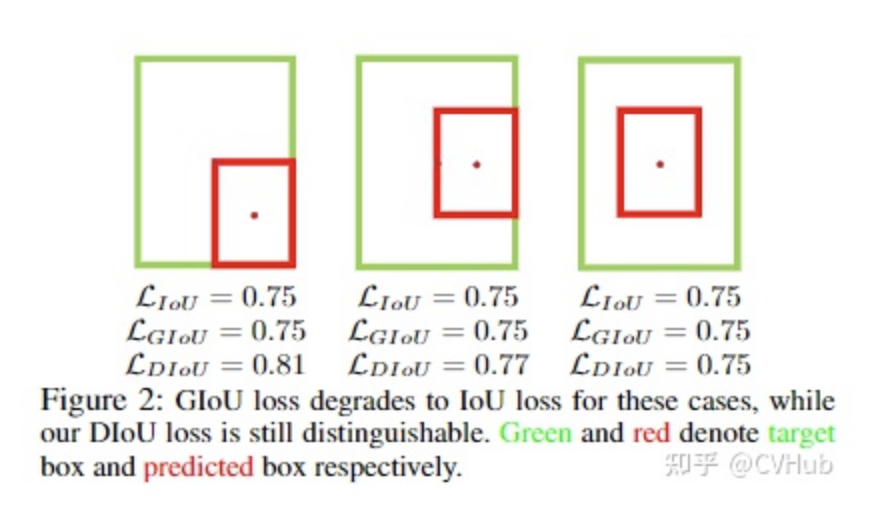
即距離IoU損失,全稱為Distance-IoU loss,由天津大學(xué)數(shù)學(xué)學(xué)院研究人員于AAAI2020所發(fā)表的這篇論文 (https://arxiv.org/abs/1911.08287)中首次提出。上面我們談到GIoU通過引入最小閉合凸面來解決IoU無法對不重疊邊框的優(yōu)化問題。但是,其仍然存在兩大局限性:邊框回歸還不夠精確 & 收斂速度緩慢 。考慮下圖這種情況,當(dāng)目標(biāo)框完全包含預(yù)測框時(shí),此時(shí)GIoU退化為IoU。顯然,我們希望的預(yù)測是最右邊這種情況。因此,作者通過計(jì)算兩個(gè)邊框之間的中心點(diǎn)歸一化距離,從而更好的優(yōu)化這種情況。
下圖表示的是GIoU損失(第一行)和DIoU損失(第二行)的一個(gè)訓(xùn)練過程收斂情況。其中綠色框?yàn)槟繕?biāo)邊框,黑色框?yàn)殄^框,藍(lán)色框和紅色框則分別表示使用GIoU損失和DIoU損失所得到的預(yù)測框。可以發(fā)現(xiàn),GIoU損失一般會(huì)增加預(yù)測框的大小使其能和目標(biāo)框重疊,而DIoU損失則直接使目標(biāo)框和預(yù)測框之間的中心點(diǎn)歸一化距離最小,即讓預(yù)測框的中心快速的向目標(biāo)中心收斂。

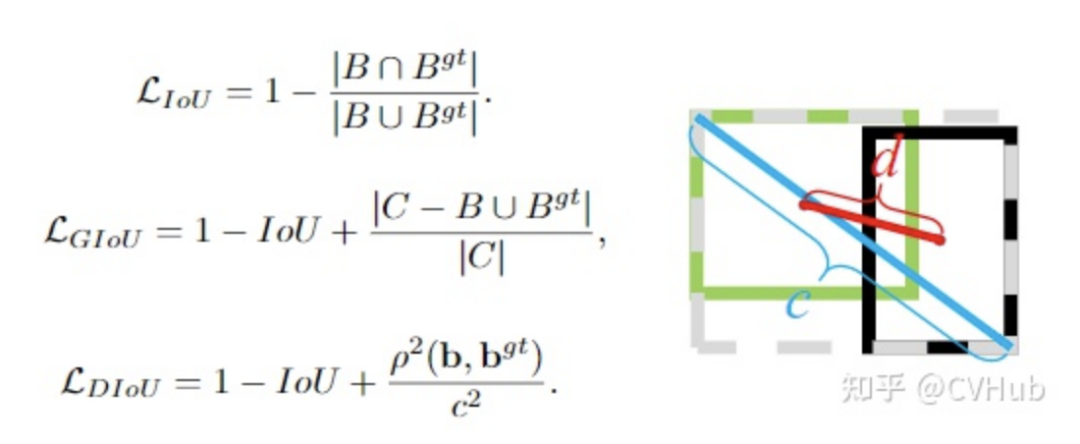
左圖給出這三個(gè)IoU損失所對應(yīng)的計(jì)算公式。對于DIoU來說,如圖右所示,其懲罰項(xiàng)由兩部分構(gòu)成:分子為目標(biāo)框和預(yù)測框中心點(diǎn)之間的歐式距離;分母為兩個(gè)框最小外接矩形框的兩個(gè)對角線距離。因此, 直接優(yōu)化兩個(gè)點(diǎn)之間的距離會(huì)使得模型收斂得更快,同時(shí)又能夠在兩個(gè)邊框不重疊的情況下給出一個(gè)優(yōu)化的方向。
-
CIoU Loss
即完整IoU損失,全稱為Complete IoU loss,與DIoU出自同一篇論文。上面我們提到GIoU存在兩個(gè)缺陷,DIoU的提出解決了其實(shí)一個(gè)缺陷,即收斂速度的問題。而一個(gè)好的邊框回歸損失應(yīng)該同時(shí)考慮三個(gè)重要的幾何因素,即重疊面積(Overlap area)、中心點(diǎn)距離(Central point distance)和高寬比(Aspect ratio)。GIoU考慮到了重疊面積的問題,DIoU考慮到了重疊面積和中心點(diǎn)距離的問題,CIoU則在此基礎(chǔ)上進(jìn)一步的考慮到了高寬比的問題。

CIoU的計(jì)算公式如下所示,可以看出,其在DIoU的基礎(chǔ)上加多了一個(gè)懲罰項(xiàng)αv。其中α為權(quán)重為正數(shù)的重疊面積平衡因子,在回歸中被賦與更高的優(yōu)先級,特別是在兩個(gè)邊框不重疊的情況下;而v則用于測量寬高比的一致性。

-
F-EIoU Loss
Focal and Efficient IoU Loss是由華南理工大學(xué)學(xué)者最近提出的一篇關(guān)于目標(biāo)檢測損失函數(shù)的論文,文章主要的貢獻(xiàn)是提升網(wǎng)絡(luò)收斂速度和目標(biāo)定位精度。目前檢測任務(wù)的損失函數(shù)主要有兩個(gè)缺點(diǎn):(1)無法有效地描述邊界框回歸的目標(biāo),導(dǎo)致收斂速度慢以及回歸結(jié)果不準(zhǔn)確(2)忽略了邊界框回歸中不平衡的問題。
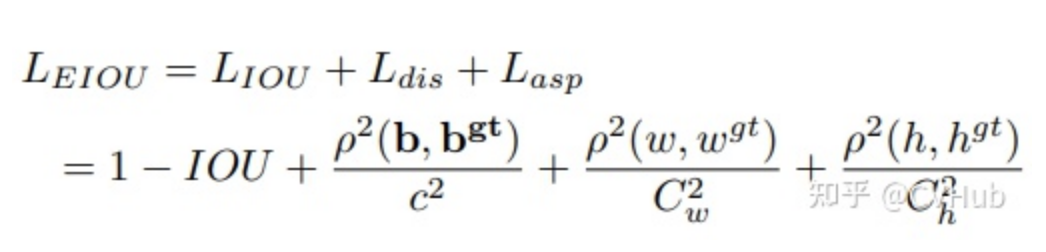
F-EIou loss首先提出了一種有效的交并集(IOU)損失,它可以準(zhǔn)確地測量邊界框回歸中的重疊面積、中心點(diǎn)和邊長三個(gè)幾何因素的差異:
其次,基于對有效樣本挖掘問題(EEM)的探討,提出了Focal loss的回歸版本,以使回歸過程中專注于高質(zhì)量的錨框:

最后,將以上兩個(gè)部分結(jié)合起來得到Focal-EIou Loss:
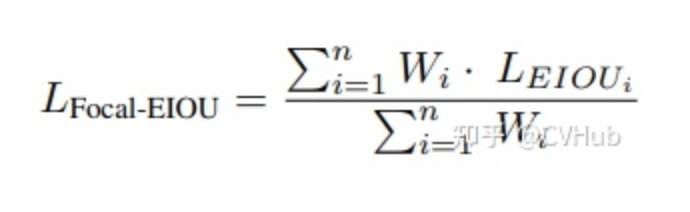
其中,通過加入每個(gè)batch的權(quán)重和來避免網(wǎng)絡(luò)在早期訓(xùn)練階段收斂慢的問題。
-
CDIoU Loss
Control Distance IoU Loss是由同濟(jì)大學(xué)學(xué)者提出的,文章的主要貢獻(xiàn)是在幾乎不增強(qiáng)計(jì)算量的前提下有效提升了邊界框回歸的精準(zhǔn)度。目前檢測領(lǐng)域主要兩大問題:(1)SOTA算法雖然有效但計(jì)算成本高(2)邊界框回歸損失函數(shù)設(shè)計(jì)不夠合理。

文章首先提出了一種對于Region Propasl(RP)和Ground Truth(GT)之間的新評估方式,即CDIoU。可以發(fā)現(xiàn),它雖然沒有直接中心點(diǎn)距離和長寬比,但最終的計(jì)算結(jié)果是有反應(yīng)出RP和GT的差異。計(jì)算公式如下:
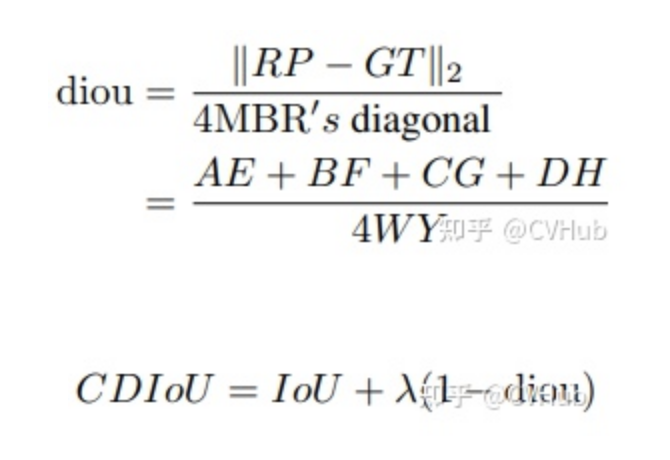
對比以往直接計(jì)算中心點(diǎn)距離或是形狀相似性的損失函數(shù),CDIoU能更合理地評估RP和GT的差異并且有效地降低計(jì)算成本。然后,根據(jù)上述的公式,CDIoU Loss可以定義為:

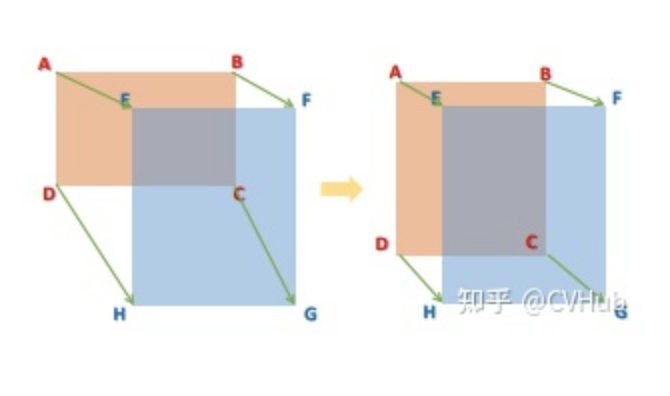
通過觀察這個(gè)公式,可以直觀地感受到,在權(quán)重迭代過程中,模型不斷地將RP的四個(gè)頂點(diǎn)拉向GT的四個(gè)頂點(diǎn),直到它們重疊為止,如下圖所示:
2. 分類損失
-
Entropy
即“熵”,熵的概念最早起源于物理學(xué),用于度量一個(gè)熱力學(xué)系統(tǒng)的無序程度。但更常見的,在信息論里面, 熵是用于描述對不確定性的度量。所以,這個(gè)概念可以延伸到深度神經(jīng)網(wǎng)絡(luò)中,比如我們的模型在做分類時(shí),其實(shí)也是在做一個(gè)判斷一個(gè)物體到底是不是屬于某個(gè)類別。因此,在正式介紹分類損失函數(shù)時(shí),我們必須先了解熵的概念。
數(shù)字化時(shí)代,信息都是由Bits(0和1)組成的。在通信時(shí),有些位是有用(useful)的信息,有些位則是冗余(redundant)的信息,有些位甚至是錯(cuò)誤(error)的信息,等等。當(dāng)我們傳達(dá)信息時(shí),我們希望盡可能多地向接收者傳遞有用的信息。
傳輸1比特的信息意味著將接收者的不確定性降低2倍。—— 香濃
下面以一個(gè)天氣預(yù)報(bào)的例子為例,形象化的講解熵到底尤為何物?假設(shè)一個(gè)地方的天氣是隨機(jī)的,每天有50%的機(jī)會(huì)是晴天或雨天。

現(xiàn)在,如果氣象站告訴您明天將要下雨,那么他們將不確定性降低了2倍。起初,有兩種同樣可能的可能性,但是在收到氣象站的更新信息后,我們只有一種 。在這里,氣象站向我們發(fā)送了一點(diǎn)有用的信息,無論他們?nèi)绾尉幋a這些信息,這都是事實(shí)。即使發(fā)送的消息是雨天的,每個(gè)字符占一個(gè)字節(jié),消息的總大小為40位,但它們?nèi)匀?strong style="font-weight: bold;color: black;">只通信1位的有用信息。現(xiàn)在,我們假設(shè)天氣有8種可能狀態(tài),且都是等可能的。

那么,當(dāng)氣象站為您提供第二天的天氣時(shí),它們會(huì)將您的不確定性降低了8倍。由于每個(gè)事件的發(fā)生幾率為1/8,因此降低因子為8。但如果這些可能性不是等概率的呢?比如,75%的機(jī)會(huì)是晴天,25%的機(jī)會(huì)是雨天。

現(xiàn)在,如果氣象臺說第二天會(huì)下雨,那么你的不確定性就降低了4倍,也就是2比特的信息。不確定性的減少就是事件概率的倒數(shù)。在這種情況下,25%的倒數(shù)是4,log(4)以2為底得到2。因此,我們得到了2位有用的信息。

如果氣象站說第二天是晴天,那么我們得到0.41比特的有用信息。那么,我們平均能從氣象站得到多少信息呢?明天是晴天的概率是75%這就給了你0.41比特的信息而明天是雨天的概率是25%這就給了你2比特的信息,這就對應(yīng)我們平均每天從氣象站得到0.81比特的信息。
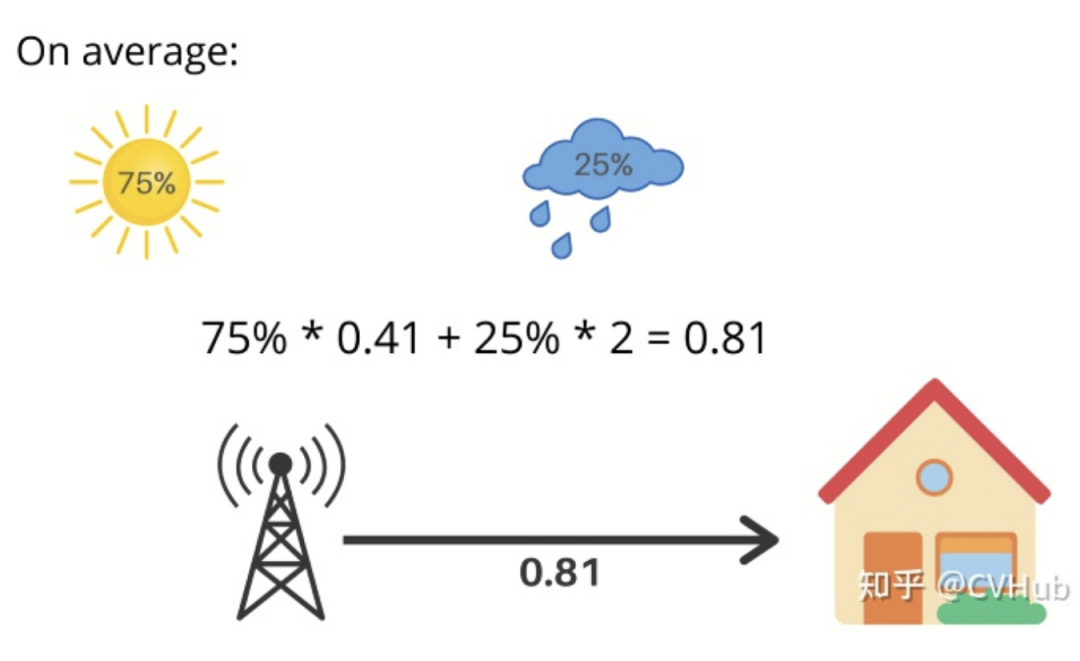
我們剛剛所計(jì)算出來的就叫做熵,它可以很好地描述事件的不確定性。它是由以下公式給出:

它衡量的是你每天了解天氣情況時(shí)所得到的平均信息量。一般來說,它給出了給定概率分布p中樣本值的平均信息量它告訴我們概率分布有多不可預(yù)測。如果我們住在沙漠中央,那里每天都是陽光燦爛的,平均來說,我們不會(huì)每天從氣象站得到很多信息。熵會(huì)接近于零。另一方面,如果天氣變化很大,熵就會(huì)大得多。
總的來說:一個(gè)事件的不確定性就越大,其信息量越大,它的熵值就越高。比如CVHub今日宣布上市。相反,如果一個(gè)時(shí)間的不確定性越小,其信息量越小,它的熵值就越低。比如CVHub今天又增加了一個(gè)讀者。
-
Cross Entropy
現(xiàn)在,讓我們討論一下交叉熵。它只是平均信息長度。考慮同樣的例子,8種可能的天氣條件,所有都是等可能的,每一種都可以用3位編碼 [2^3=8]。
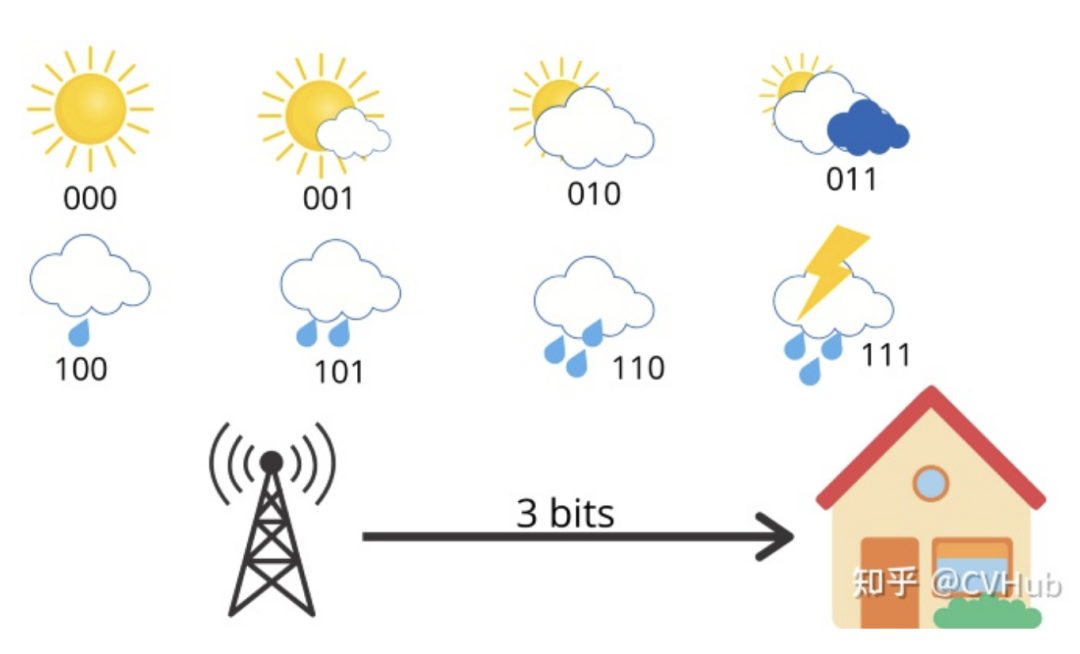
這里的平均信息長度是3,這就是交叉熵。但是現(xiàn)在,假設(shè)你住在一個(gè)陽光充足的地區(qū),那里的天氣概率分布是這樣的:
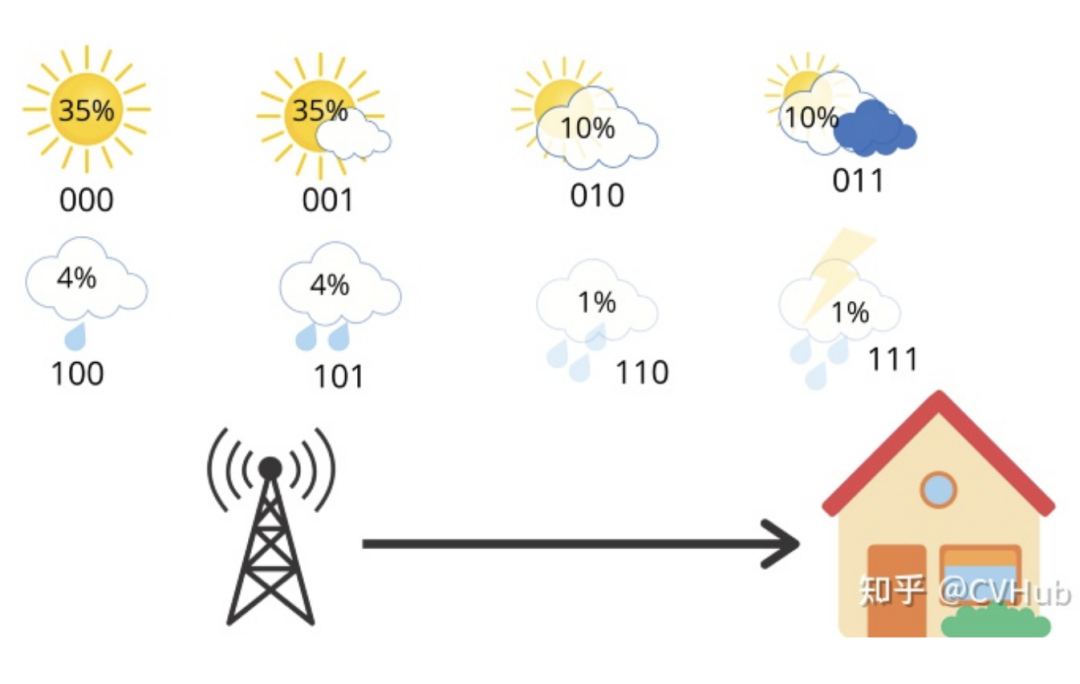
即每天有35%的機(jī)會(huì)出現(xiàn)晴天,只有1%的機(jī)會(huì)出現(xiàn)雷雨。我們可以計(jì)算這個(gè)概率分布的熵,我們得到2.23bits的熵,具體計(jì)算公式如下:

所以,平均來說,氣象站發(fā)送了3個(gè)比特,但接收者只得到2.23個(gè)比特有用的信息。但是,我們可以做得更好。例如,讓我們像這樣更改編碼方式:
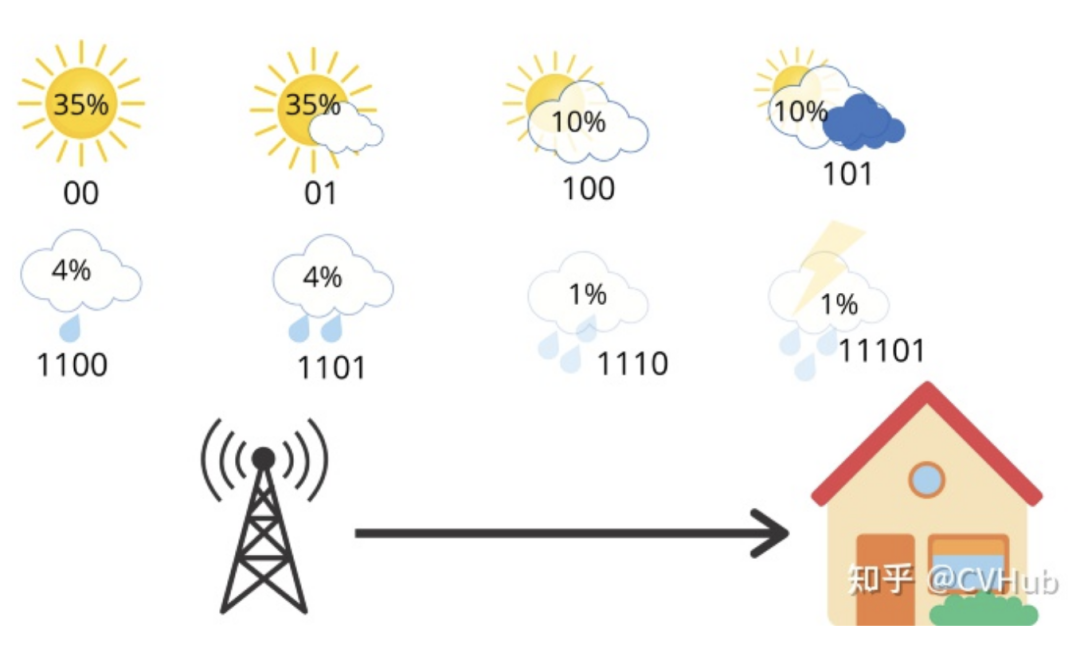
現(xiàn)在,我們只使用2位用于表示晴天或部分晴天,使用3位用于多云和大部分多云,使用4位用于表示中雨和小雨,使用5位用于大雨和雷暴。天氣的編碼方式是明確的,并且如果你鏈接多條消息,則只有一種方法可以解釋位的順序。例如,01100只能表示部分晴天(01),然后是小雨(100)。因此,如果我們計(jì)算該站每天發(fā)送的平均比特?cái)?shù),則可以得出:

我們將得到4.58位。大約是熵的兩倍。平均而言,該站發(fā)送4.58位,但只有2.23位對接收者有用。每條消息發(fā)送的信息量是必要信息的兩倍。這是因?yàn)槲覀兪褂玫木幋a對天氣分布做出了一些隱含的假設(shè)。例如,當(dāng)我們在晴天使用2位消息時(shí),我們隱式地預(yù)測晴天的概率為25%。以同樣的方式,我們計(jì)算所有天氣情況。
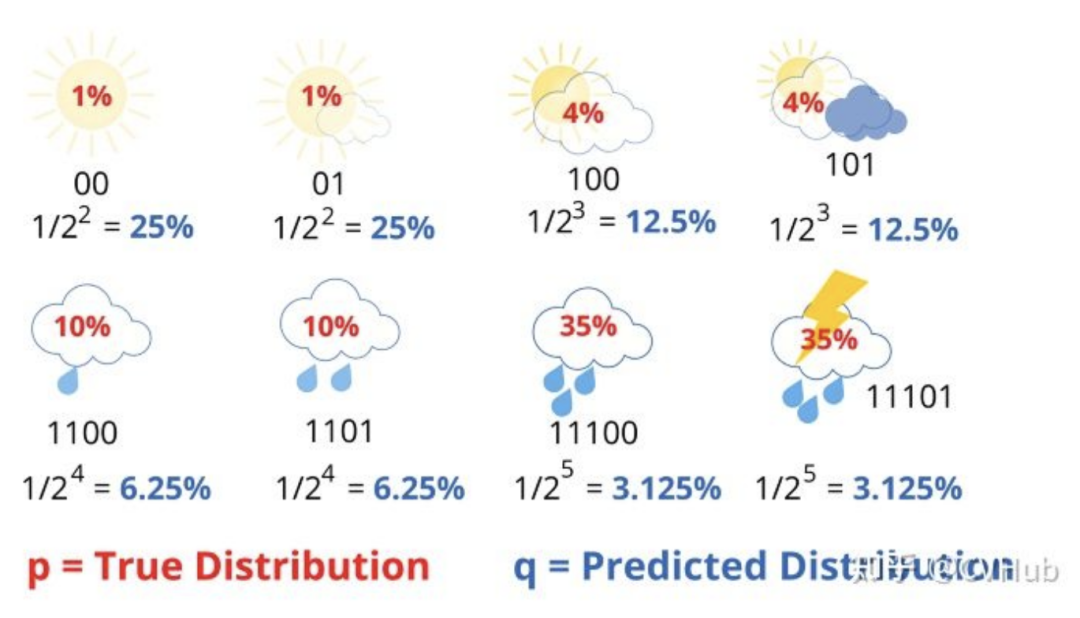
分母中2的冪對應(yīng)于用于傳輸消息的比特?cái)?shù)。很明顯,預(yù)測分布q和真實(shí)分布p有很大不同。現(xiàn)在我們可以把交叉熵表示成真實(shí)概率分布p的函數(shù)和預(yù)測概率分布q的函數(shù):

注意,這里對數(shù)的底數(shù)為2。
-
K-L Divergence
即KL散度。對于交叉熵?fù)p失,除了我們在這里使用預(yù)測概率的對數(shù)(log(q(i)))外,它看起來與上面熵的方程非常相似。如果我們的預(yù)測是完美的,那就是預(yù)測分布等于真實(shí)分布,此時(shí)交叉熵就等于熵。但是,如果分布不同,則交叉熵將比熵大一些位數(shù)。交叉熵超過熵的量稱為相對熵,或更普遍地稱為庫爾貝克-萊布里埃發(fā)散度(KL Divergence)。總結(jié)如下:

接上面的例子,我們便可以順便算出:KL散度 = 交叉熵 - 熵 = 4.58 - 2.23 = 2.35(Bits)。通常來說,一般分類損失最常用的損失函數(shù)之一便是交叉熵?fù)p失。假設(shè)我們當(dāng)前做一個(gè)3個(gè)類別的圖像分類任務(wù),如貓、狗、豬。給定一張輸入圖片其真實(shí)類別是貓,模型通過訓(xùn)練用Softmax分類后的輸出結(jié)果為:{"cat": 0.3, "dog": 0.45, "pig": 0.25},那么此時(shí)交叉熵為:-1 * log(0.3) = 1.203。當(dāng)輸出結(jié)果為:{"cat": 0.5, "dog": 0.3, "pig": 0.2}時(shí),交叉熵為:-1 * log(0.5) = 0.301。可以發(fā)現(xiàn),當(dāng)真實(shí)類別的預(yù)測概率接近于0時(shí),損失會(huì)變得非常大。但是當(dāng)預(yù)測值接近真實(shí)值時(shí),損失將接近0。
-
Dice Loss
即骰子損失,出自V-Net [3],是一種用于評估兩個(gè)樣本之間相似性度量的函數(shù),取值范圍為0~1,值越大表示兩個(gè)值的相似度越高,其基本定義(二分類)如下:
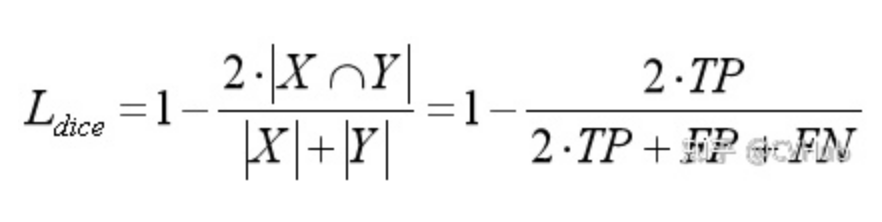
其中,|X∩Y|表示X和Y之間的交集,|X|和|Y|分別表示集合X和Y中像素點(diǎn)的個(gè)數(shù),分子乘于2保證域值范圍在0~1之間,因?yàn)榉帜赶嗉訒r(shí)會(huì)計(jì)算多一次重疊區(qū)間,如下圖:

從右邊公式也可以看出,其實(shí)Dice系數(shù)是等價(jià)于F1分?jǐn)?shù)的,優(yōu)化Dice等價(jià)于優(yōu)化F1值。此外,為了防止分母項(xiàng)為0,一般我們會(huì)在分子和分母處同時(shí)加入一個(gè)很小的數(shù)作為平滑系數(shù),也稱為拉普拉斯平滑項(xiàng)。Dice損失由以下兩個(gè)主要特性:
-
有益于正負(fù)樣本不均衡的情況,側(cè)重于對前景的挖掘; -
訓(xùn)練過程中,在有較多小目標(biāo)的情況下容易出現(xiàn)振蕩; -
極端情況下會(huì)出現(xiàn)梯度飽和的情況。
所以一般來說,我們都會(huì)結(jié)合交叉熵?fù)p失或者其他分類損失一同進(jìn)行優(yōu)化。
-
Focal Loss
焦點(diǎn)損失,出自何凱明的《Focal Loss for Dense Object Detection》[4],出發(fā)點(diǎn)是解決目標(biāo)檢測領(lǐng)域中one-stage算法如YOLO系列算法準(zhǔn)確率不高的問題。作者認(rèn)為樣本的類別不均衡(比如前景和背景)是導(dǎo)致這個(gè)問題的主要原因。比如在很多輸入圖片中,我們利用網(wǎng)格去劃分小窗口,大多數(shù)的窗口是不包含目標(biāo)的。如此一來,如果我們直接運(yùn)用原始的交叉熵?fù)p失,那么負(fù)樣本所占比例會(huì)非常大,主導(dǎo)梯度的優(yōu)化方向,即網(wǎng)絡(luò)會(huì)偏向于將前景預(yù)測為背景。即使我們可以使用OHEM(在線困難樣本挖掘)算法來處理不均衡的問題,雖然其增加了誤分類樣本的權(quán)重,但也容易忽略掉易分類樣本。而Focal loss則是聚焦于訓(xùn)練一個(gè)困難樣本的稀疏集,通過直接在標(biāo)準(zhǔn)的交叉熵?fù)p失基礎(chǔ)上做改進(jìn),引進(jìn)了兩個(gè)懲罰因子,來減少易分類樣本的權(quán)重,使得模型在訓(xùn)練過程中更專注于困難樣本。其基本定義如下:

其中:
-
參數(shù) α 和 (1-α) 分別用于控制正/負(fù)樣本的比例,其取值范圍為[0, 1]。α的取值一般可通過交叉驗(yàn)證來選擇合適的值。 -
參數(shù) γ 稱為聚焦參數(shù),其取值范圍為[0, +∞),目的是通過減少易分類樣本的權(quán)重,從而使模型在訓(xùn)練時(shí)更專注于困難樣本。當(dāng) γ = 0 時(shí),F(xiàn)ocal Loss就退化為交叉熵?fù)p失,γ 越大,對易分類樣本的懲罰力度就越大。
實(shí)驗(yàn)中,作者取(α=0.25,γ=0.2)的效果最好,具體還需要根據(jù)任務(wù)的情況調(diào)整。由此可見,應(yīng)用Focal-loss也會(huì)引入多了兩個(gè)超參數(shù)需要調(diào)整,而一般來說很需要經(jīng)驗(yàn)才能調(diào)好。
-
Tversky loss
Tversky loss,發(fā)表于CVPR 2018上的一篇《Tversky loss function for image segmentation using 3D fully convolutional deep networks》文章 [5],是根據(jù)Tversky 等人于1997年發(fā)表的《Features of Similarity》文章 [6] 所提出的Tversky指數(shù)所改造的。Tversky系數(shù)主要用于描述兩個(gè)特征(集合)之間的相似度,其定義如下:

由上可知,它是結(jié)合了Dice系數(shù)(F1-score)以及Jaccard系數(shù)(IoU)的一種廣義形式,如:
-
當(dāng) α = β = 0.5時(shí),此時(shí)Tversky loss便退化為Dice系數(shù)(分子分母同乘于2) -
當(dāng) α = β = 1時(shí),此時(shí)Tversky loss便退化為Jaccard系數(shù)(交并比)
因此,我們只需控制 α 和 β 便可以控制假陰性和假陽性之間的平衡。比如在醫(yī)學(xué)領(lǐng)域我們要檢測腫瘤時(shí),更多時(shí)候我們是希望Recall值(查全率,也稱為靈敏度或召回率)更高,因?yàn)槲覀儾幌Mf將腫瘤檢測為非腫瘤,即假陰性。因此,我們可以通過增大 β 的取值,來提高網(wǎng)絡(luò)對腫瘤檢測的靈敏度。其中,α + β 的取值我們一般會(huì)令其1。
總結(jié)
總的來說,損失函數(shù)的形式千變?nèi)f化,但追究溯源還是萬變不離其宗。其本質(zhì)便是給出一個(gè)能較全面合理的描述兩個(gè)特征或集合之間的相似性度量或距離度量,針對某些特定的情況,如類別不平衡等,給予適當(dāng)?shù)膽土P因子進(jìn)行權(quán)重的加減。大多數(shù)的損失都是基于最原始的損失一步步改進(jìn)的,或提出更一般的形式,或提出更加具體實(shí)例化的形式。
Reference:
本文亮點(diǎn)總結(jié)
如果覺得有用,就請分享到朋友圈吧!
公眾號后臺回復(fù)“CVPR2021 Oral”獲取CVPR2021 Oral論文合集~

# CV技術(shù)社群邀請函 #
備注:姓名-學(xué)校/公司-研究方向-城市(如:小極-北大-目標(biāo)檢測-深圳)
即可申請加入極市目標(biāo)檢測/圖像分割/工業(yè)檢測/人臉/醫(yī)學(xué)影像/3D/SLAM/自動(dòng)駕駛/超分辨率/姿態(tài)估計(jì)/ReID/GAN/圖像增強(qiáng)/OCR/視頻理解等技術(shù)交流群
每月大咖直播分享、真實(shí)項(xiàng)目需求對接、求職內(nèi)推、算法競賽、干貨資訊匯總、與 10000+來自港科大、北大、清華、中科院、CMU、騰訊、百度等名校名企視覺開發(fā)者互動(dòng)交流~