三維點云是最重要的三維數(shù)據(jù)表達方式之一,在三維重建、語義及實例分割、三維物體檢測等方向表達相關信息。點云學習在計算機視覺、自動駕駛、機器人等領域得到越來越多的廣泛應用。但點云的一些特性也使它難以處理,首先,三維點云比圖像多了一個維度;其次,點云是不規(guī)則分布的,比圖像式的規(guī)則網(wǎng)格更難處理;然后,點云缺少了圖像中的紋理,導致在語義分析方面的困難;同時,由于三維點云的應用面非常廣,點云處理所涉及的算法也多種多樣,涵蓋了機器人、計算機視覺的各個分支。這對學習技術有了很高的要求,但相關教材寥寥無幾,網(wǎng)上資料也比較零散,國內(nèi)外系統(tǒng)講解三維點云的課程更是屈指可數(shù)。基于此,深藍學院開設了『三維點云處理』課程,希望通過這門課,大家能對一些經(jīng)典算法的理論有一些清晰的認識,自己能實現(xiàn)這些算法,而不是簡單調(diào)用一個API而已。
自動駕駛研究科學家
博士期間,師從電子與計算機系Ben M. Chen教授及計算機系Lee Gim Hee教授,主要研究領域為計算機視覺、深度學習、機器人。在CVPR , ICCV , ICRA , IROS 的頂級會議上以第一作者發(fā)表論文多篇。在2017, 2015年國際微小型無人機大賽中分別獲得冠軍、亞軍。
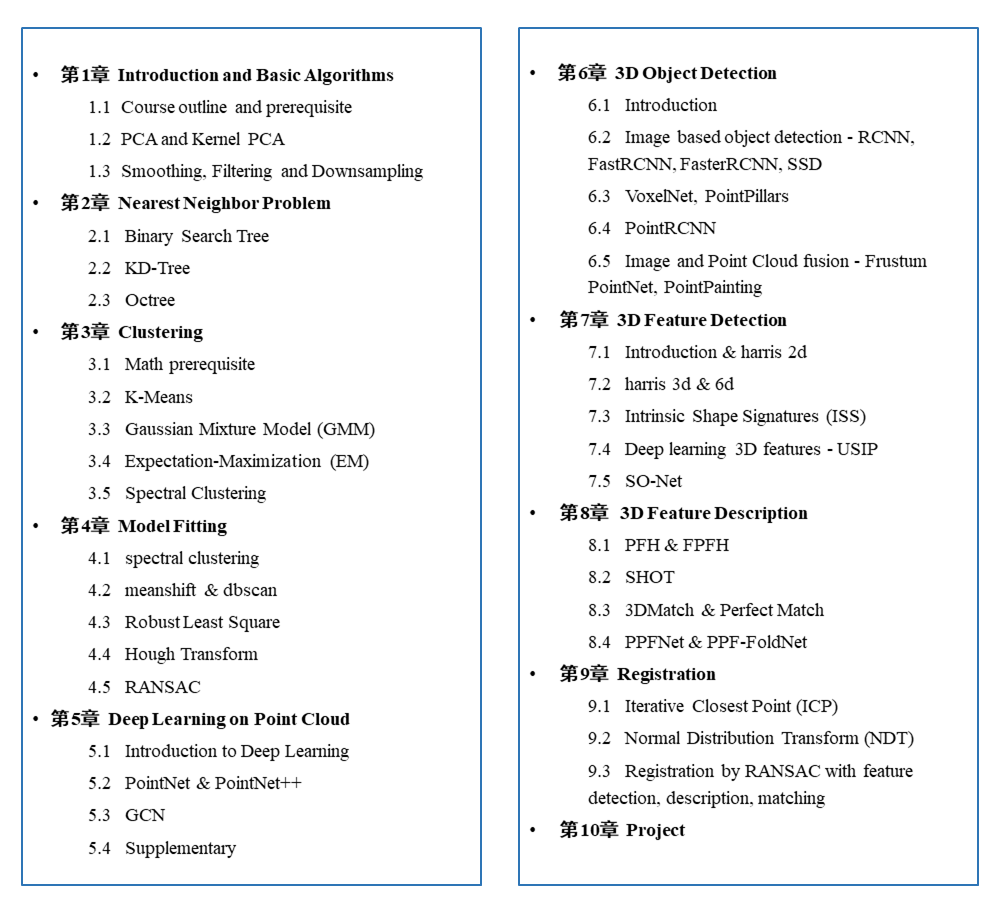 (本課程中文授課,點擊圖片查看大圖)
(本課程中文授課,點擊圖片查看大圖)
本門課程采用理論與實踐相結合的教學方式,通過9個實踐項目,讓大家將課上所學知識,即學即用,通過親自動手實踐達到靈活掌握,融會貫通的效果。1. 對三維點云這一領域有全方位的認知,了解三維感知的各種問題及解決方案;
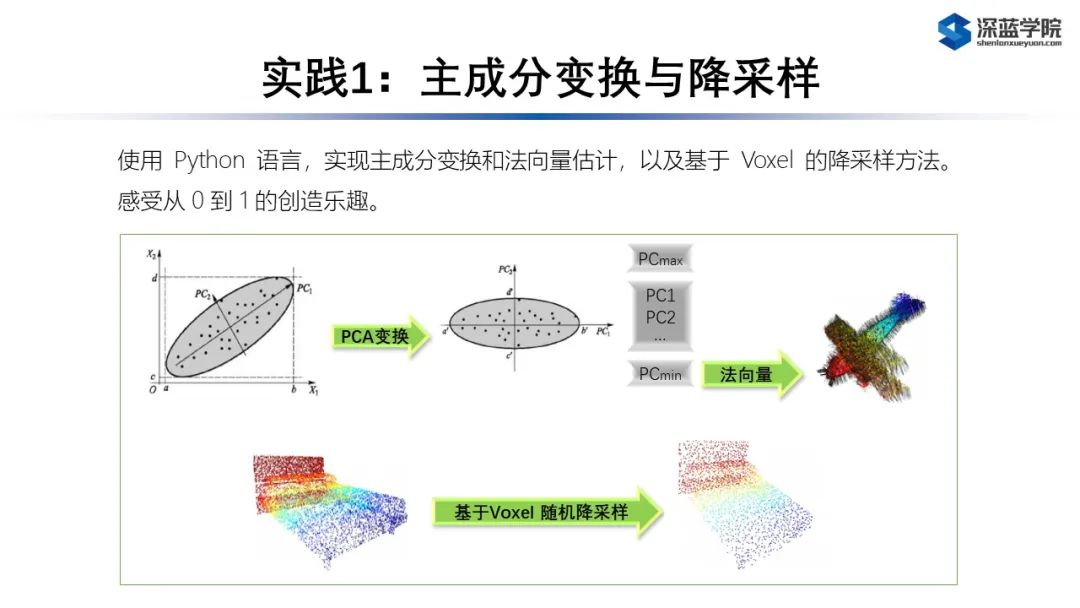
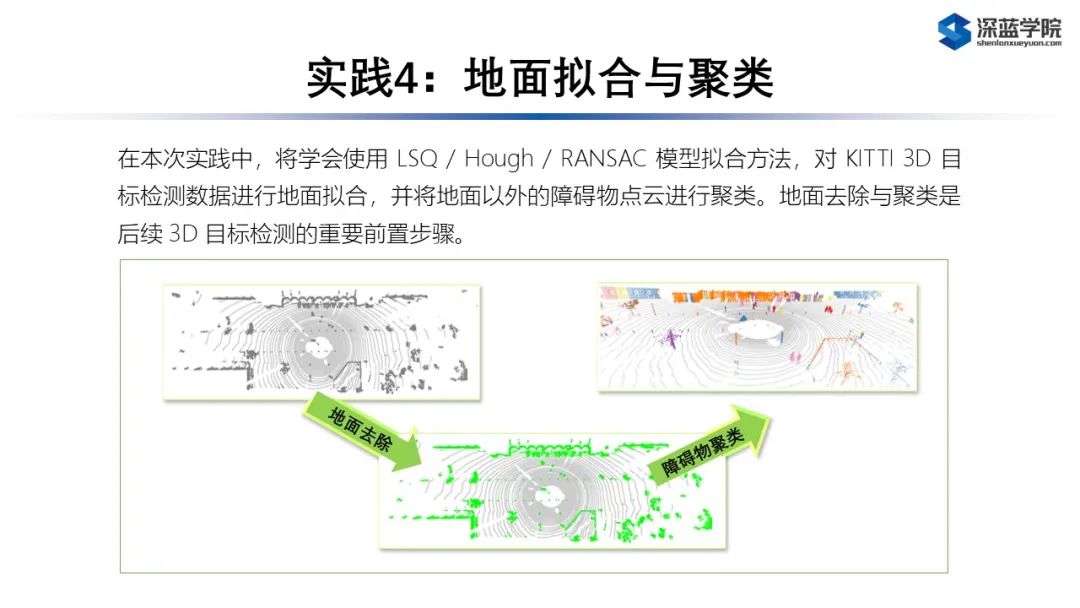
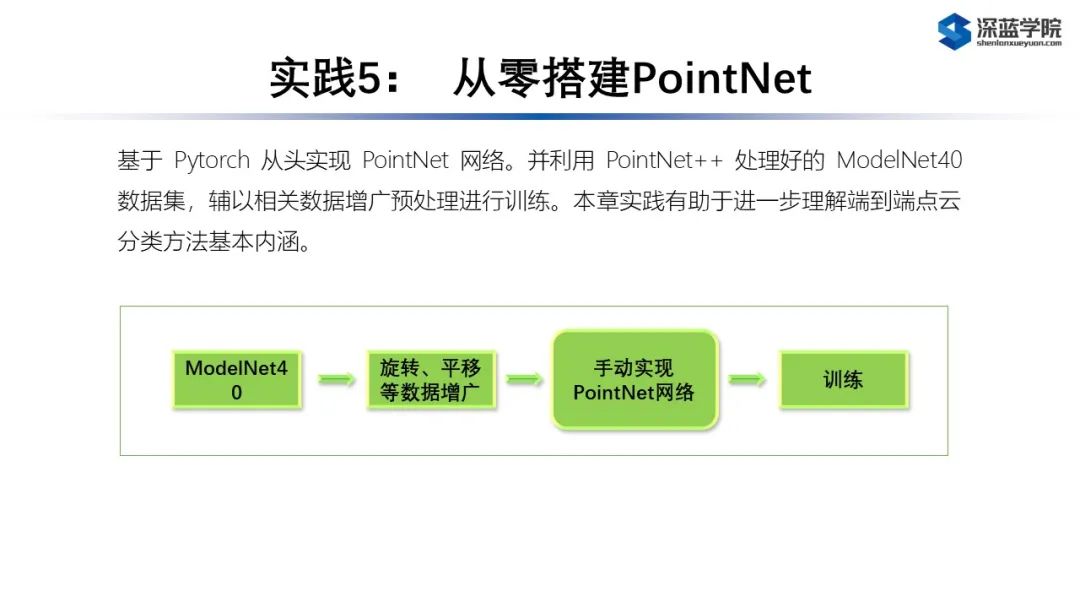
2. 深入理解各個經(jīng)典點云算法,比如octree,ICP,PointNet等,并且在真實數(shù)據(jù)集上實現(xiàn)、應用這些算法;
3. 涉獵最前沿的感知(Perception)方向的深度學習算法,比如物體檢測、點云配準、特征提取等,了解學術界的熱點問題及發(fā)展趨勢;
4. 了解實際應用中各種算法的優(yōu)勢及局限,對于具體問題如何選擇合適的算法,以及如何修改算法應對長尾/邊緣問題(longtail/edge cases)。伙伴們大多是來自985、211及海外院校碩博,在這里大家一起學習、進行討論與研究。獨一無二的優(yōu)質(zhì)圈子將是你未來學習與就業(yè)的寶貴資源。
學完課程后將有機會收獲優(yōu)秀學員證書、畢業(yè)證書,為你的簡歷加分添彩。講師&助教及時答疑解惑,班主任全程帶班督學,幫你克服拖延,不斷進步。
(左右滑動,查看更多)
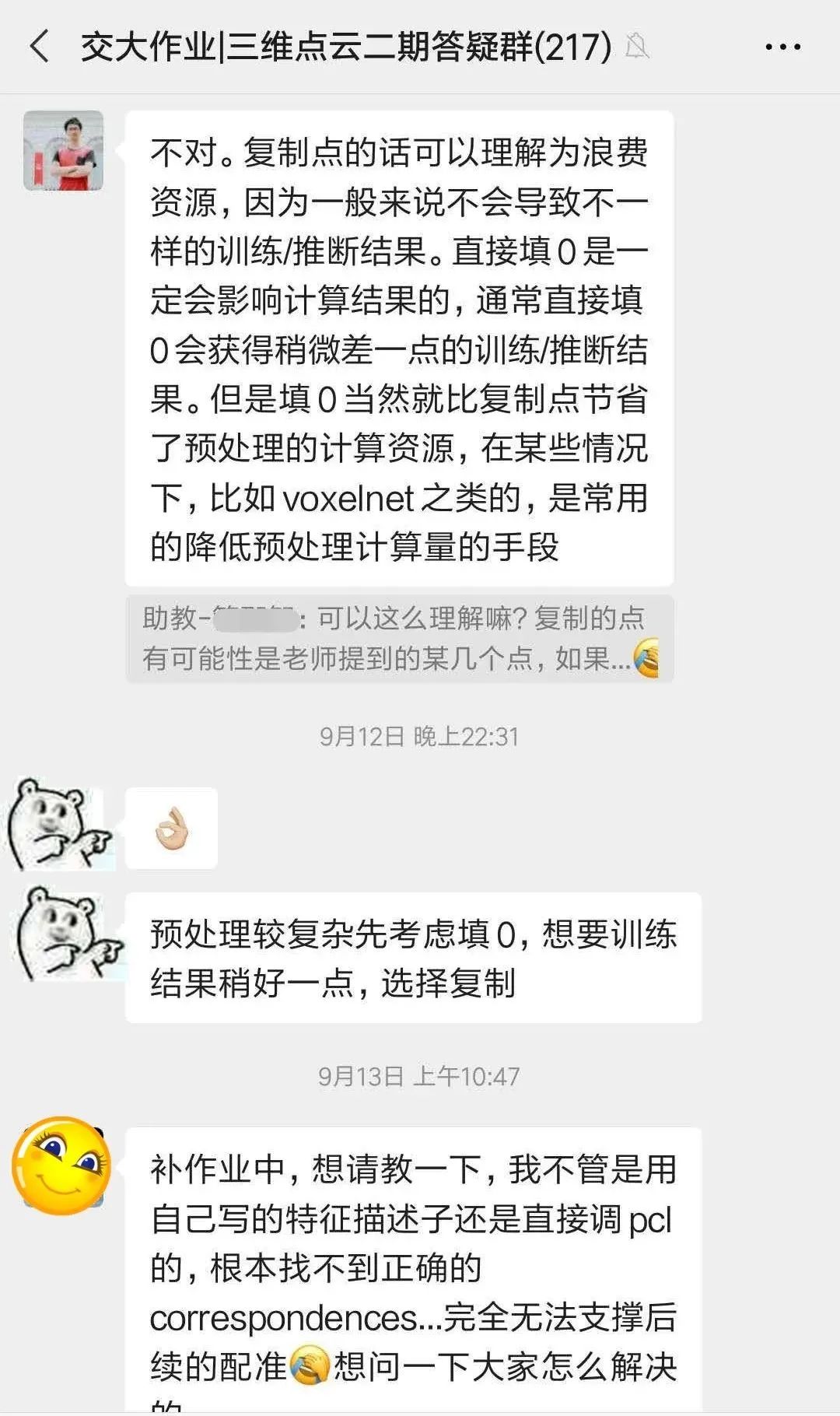
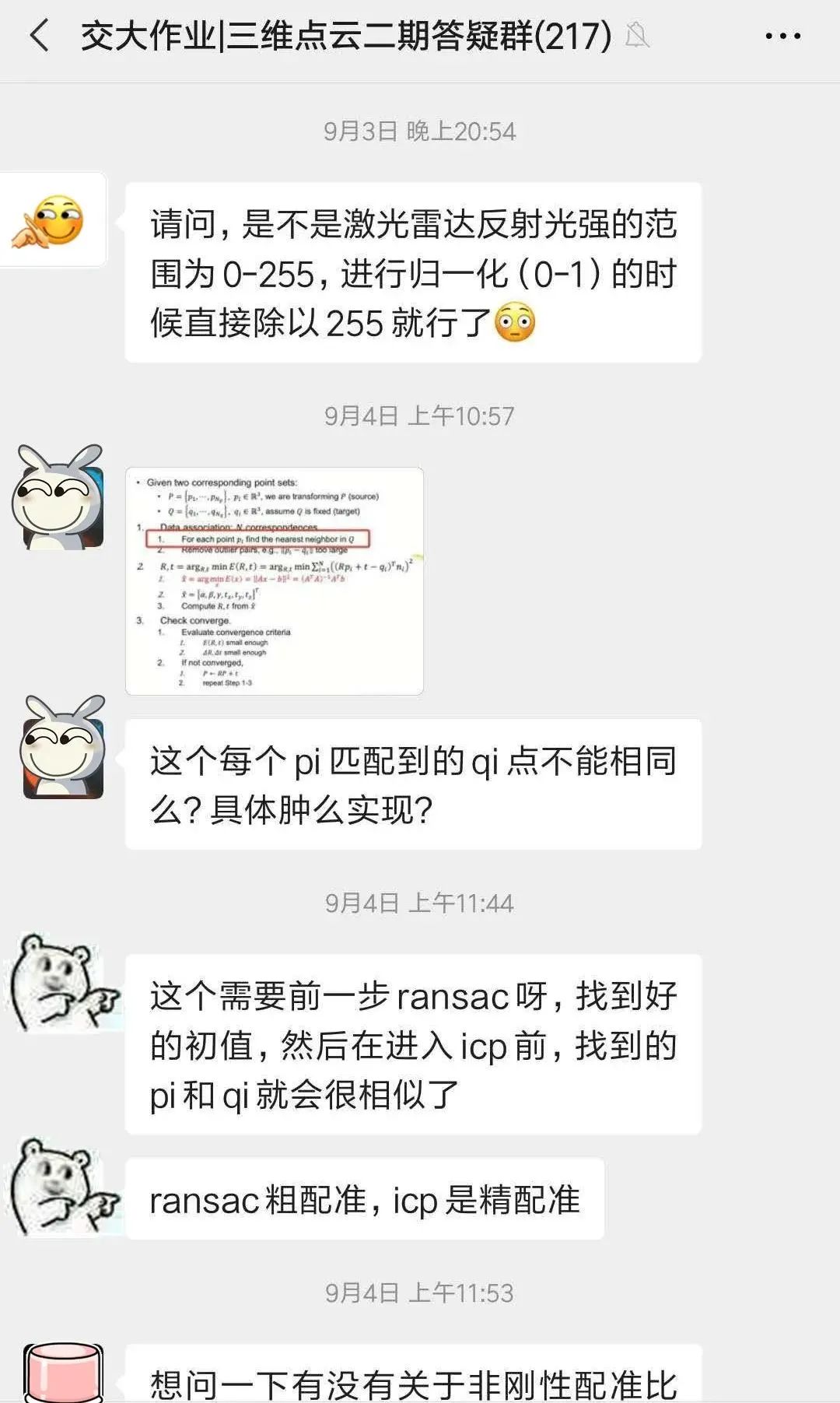
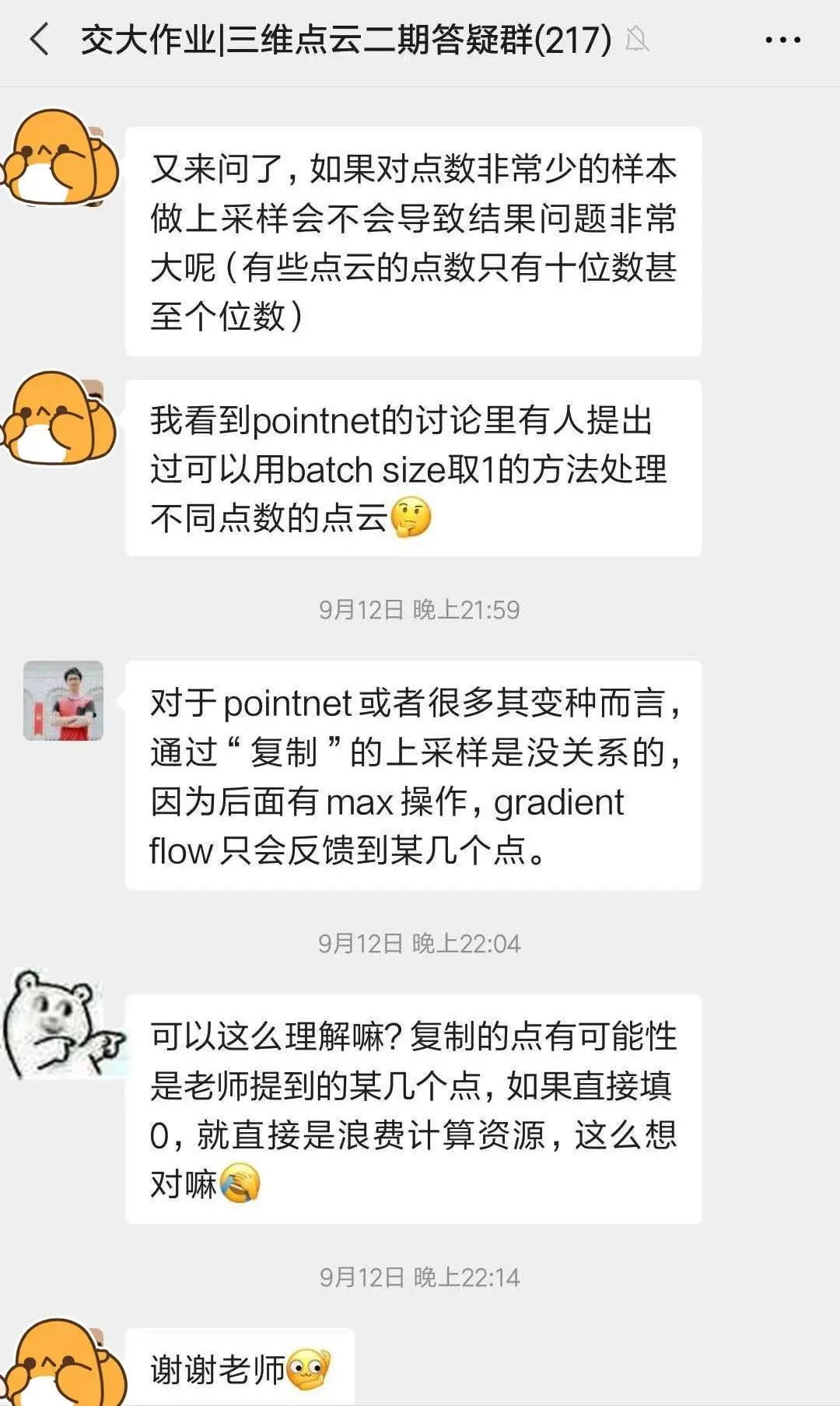
助教會對作業(yè)進行1V1講評和指導;在班會中,學習更多技巧;在交流中收獲更多思路。
現(xiàn)在報名,立即優(yōu)惠50元
僅最后21個優(yōu)惠名額
掃碼備注“623”,優(yōu)先咨詢
↓↓↓