
RGBD深度相機(jī)如何標(biāo)定?
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá) 
摘要
常見的消費(fèi)級(jí)RGB-D相機(jī)具有粗略的內(nèi)參和外參校準(zhǔn)數(shù)據(jù)的,通常無(wú)法滿足許多機(jī)器人應(yīng)用所需的精度要求。我們的校準(zhǔn)方法基于一種新穎的雙分量測(cè)量誤差模型,該模型統(tǒng)一了基于不同技術(shù)RGB-D相機(jī)的誤差源,如結(jié)構(gòu)光3D相機(jī)和飛行時(shí)間相機(jī),提出的的標(biāo)定模型使用兩種不同的參數(shù)實(shí)現(xiàn)對(duì)圖像的矯正,這兩種圖通過(guò)控制函數(shù)的線性組合提供校準(zhǔn)讀數(shù),非線性優(yōu)化算法在單個(gè)優(yōu)化步驟中細(xì)化相機(jī)深度傳感器剛性位移以及上述參數(shù),確保結(jié)果高度可靠。
主要貢獻(xiàn)
本文的主要貢獻(xiàn)如下:
一個(gè)通用的、可實(shí)現(xiàn)的測(cè)量誤差模型,該模型以統(tǒng)一的方式很好地描述了不同深度傳感器類型的誤差。
一種空間和參數(shù)不畸變圖像,以緊湊有效的方式模擬結(jié)構(gòu)光深度傳感器的畸變模型
一種新的優(yōu)化框架,在估計(jì)攝像機(jī)深度傳感器剛性位移以及描述深度測(cè)量系統(tǒng)誤差的參數(shù)模型
提出方法的開源實(shí)現(xiàn),集成在ROS(機(jī)器人操作系統(tǒng))框架內(nèi)。
內(nèi)容介紹
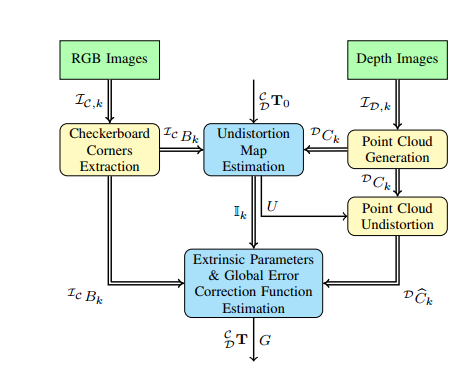
標(biāo)定算法流程

深度圖矯正,不同距離的一面墻的點(diǎn)云矯正后的結(jié)果

校準(zhǔn)后的RGB圖與深度圖配準(zhǔn)與使用默認(rèn)校準(zhǔn)參數(shù)生成RGB圖與深度圖配準(zhǔn)結(jié)果的對(duì)比

總結(jié)
本文提出了一種通用RGB-D傳感器標(biāo)定的新方法,開源的校準(zhǔn)程序僅要求用戶在最小結(jié)構(gòu)的環(huán)境中收集數(shù)據(jù),并在輸出中提供傳感器的內(nèi)參和外參數(shù)據(jù),通過(guò)兩個(gè)不同的分量,一個(gè)畸變誤差和一個(gè)全局系統(tǒng)誤差來(lái)概括深度傳感器誤差,畸變誤差使用每像素參數(shù)無(wú)畸變圖建模,在算法的第一階段進(jìn)行估計(jì),在算法的第二階段,在魯棒優(yōu)化框架內(nèi),估計(jì)深度系統(tǒng)誤差以及攝像機(jī)深度傳感器對(duì)準(zhǔn),文章用幾個(gè)傳感器進(jìn)行了詳盡的實(shí)驗(yàn),結(jié)果表明,該方法提供了高度精確的結(jié)果,優(yōu)于其他最先進(jìn)的方法。與其他方法相比,方法非常適合不同類型的深度傳感器,同時(shí)需要相對(duì)簡(jiǎn)單的標(biāo)定要求。
下載1:OpenCV-Contrib擴(kuò)展模塊中文版教程
在「小白學(xué)視覺」公眾號(hào)后臺(tái)回復(fù):擴(kuò)展模塊中文教程,即可下載全網(wǎng)第一份OpenCV擴(kuò)展模塊教程中文版,涵蓋擴(kuò)展模塊安裝、SFM算法、立體視覺、目標(biāo)跟蹤、生物視覺、超分辨率處理等二十多章內(nèi)容。
下載2:Python視覺實(shí)戰(zhàn)項(xiàng)目52講
在「小白學(xué)視覺」公眾號(hào)后臺(tái)回復(fù):Python視覺實(shí)戰(zhàn)項(xiàng)目,即可下載包括圖像分割、口罩檢測(cè)、車道線檢測(cè)、車輛計(jì)數(shù)、添加眼線、車牌識(shí)別、字符識(shí)別、情緒檢測(cè)、文本內(nèi)容提取、面部識(shí)別等31個(gè)視覺實(shí)戰(zhàn)項(xiàng)目,助力快速學(xué)校計(jì)算機(jī)視覺。
下載3:OpenCV實(shí)戰(zhàn)項(xiàng)目20講
在「小白學(xué)視覺」公眾號(hào)后臺(tái)回復(fù):OpenCV實(shí)戰(zhàn)項(xiàng)目20講,即可下載含有20個(gè)基于OpenCV實(shí)現(xiàn)20個(gè)實(shí)戰(zhàn)項(xiàng)目,實(shí)現(xiàn)OpenCV學(xué)習(xí)進(jìn)階。
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~