
機(jī)器視覺(jué)工業(yè)缺陷檢測(cè)(光源,相機(jī),鏡頭,算法)

向AI轉(zhuǎn)型的程序員都關(guān)注了這個(gè)號(hào)??????
機(jī)器學(xué)習(xí)AI算法工程?? 公眾號(hào):datayx
一般機(jī)器視覺(jué)系統(tǒng):相機(jī)、鏡頭、光源、運(yùn)動(dòng)系統(tǒng)。
? ? ? ? ?視覺(jué)工業(yè)檢測(cè)大體分為工件尺寸測(cè)量與定位,和表面缺陷檢測(cè),及各種Logo標(biāo)識(shí)的檢測(cè)與識(shí)別等。
尺寸測(cè)量主要是檢測(cè)物體的長(zhǎng)、寬、高,比較常見(jiàn)主要是物體的二維尺寸(寬和高)檢測(cè)。
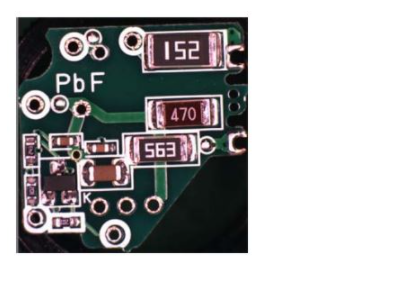
表面缺陷檢測(cè)主要是物體表面局部物理或者化學(xué)性質(zhì)不均勻的區(qū)域,比較常見(jiàn)的有金屬或者塑料制品表面的劃痕(如:手機(jī)殼/屏幕表面的劃痕)、斑點(diǎn)和孔洞(如:PCB板漏了焊點(diǎn)或者表面多了焊點(diǎn)),紙張表面的色差、臟污點(diǎn)、破損,紙制品表面的壓痕、凸起,玻璃等非金屬制品表面的雜質(zhì)、破損、污點(diǎn)、平整度等。
Logo標(biāo)識(shí)的檢測(cè)與識(shí)別,主要是Logo標(biāo)識(shí)印刷是否正確、是否完整。
? ? ? ? 視覺(jué)檢測(cè)系統(tǒng)基本組成主要包括圖像的獲取、圖像的處理分析、數(shù)據(jù)管理及人機(jī)交互(也有的分為相機(jī)、光源、鏡頭、圖像采集卡、視覺(jué)處理系統(tǒng)等五個(gè)部分)。其中圖像的獲取模塊,硬件部分主要包括照明光源、相機(jī)、鏡頭、圖像采集卡等。圖像的處理分析,軟件算法部分主要包括圖像的預(yù)處理與檢測(cè)處理,預(yù)處理對(duì)圖像數(shù)據(jù)進(jìn)行加工,使我們需要的圖像特征更加明顯;檢測(cè)處理是根據(jù)圖像特征對(duì)損傷、尺寸進(jìn)行檢測(cè)。數(shù)據(jù)管理及人機(jī)交互,對(duì)于檢測(cè)到的物體是否合格,以及去向根據(jù)實(shí)際需要做相應(yīng)的處理。
一、硬件選型
1、光源的選擇
光源是基礎(chǔ),打光是藝術(shù)。一個(gè)好的打光效果,基本決定了視覺(jué)檢測(cè)成功的一大半。
光源的合理性選擇,直接影響了輸入圖像數(shù)據(jù)的質(zhì)量與應(yīng)用效果。針對(duì)每個(gè)不同的應(yīng)用案例與環(huán)境,需要選擇相應(yīng)的光源與合理的照明方式,以求達(dá)到最好的應(yīng)用效果。
(1)光源可分為可見(jiàn)光和不可見(jiàn)光。
常用的幾種可見(jiàn)光源有LED燈、螢光燈、鹵素?zé)簦ü饫w光源)、特殊光源。
LED 燈:
? 使用壽命約10000-30000小時(shí)。
? 可以使用多個(gè)LED達(dá)到高亮度,同時(shí)可組合不同的形狀;
? 響應(yīng)速度快,波長(zhǎng)可以根據(jù)用途選擇,制成不同的顏色。
螢光燈:
? 使用壽命大約1500-3000小時(shí);
? 優(yōu)點(diǎn):擴(kuò)散性好、適合大面積均勻照射;
? 缺點(diǎn):響應(yīng)速度慢,亮度較暗。
光纖鹵素?zé)簦?/p>
? 使用壽命大約1000小時(shí);
? 優(yōu)點(diǎn):亮度高;
? 缺點(diǎn):響應(yīng)速度慢,幾乎沒(méi)有光亮度和色溫的變化。
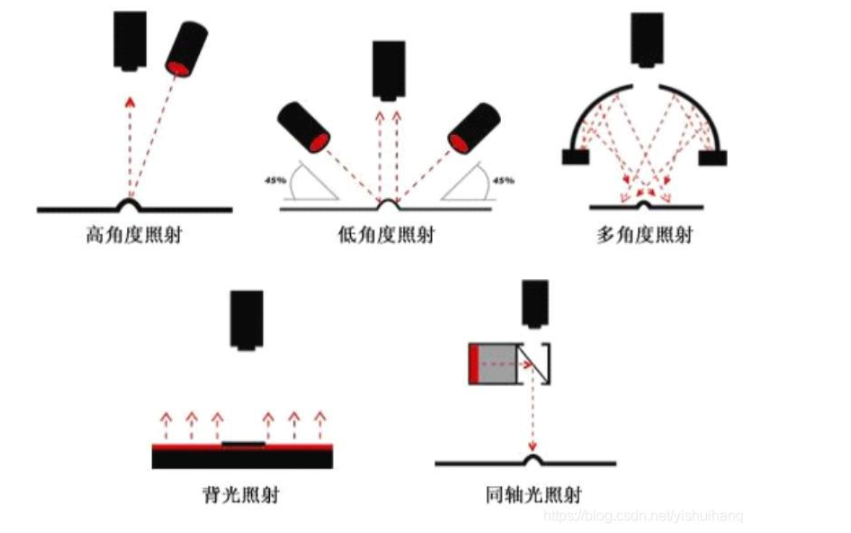
(2)按照射方式不同可分為背向照明、前向照明、結(jié)構(gòu)光和頻閃光照明等。
背向照明是被測(cè)物放在光源和攝像機(jī)之間,它的優(yōu)點(diǎn)是能獲得高對(duì)比度的圖像,圖像效果為黑白分明的被測(cè)物輪廓,常用于尺寸測(cè)量;
前向照明是光源和攝像機(jī)位于被測(cè)物的同側(cè),這種方式便于安裝,主要用于檢測(cè)物體表面的重要細(xì)節(jié)特征、缺陷和劃痕。
結(jié)構(gòu)光照明是將光柵或線(xiàn)光源等投射到被測(cè)物上,根據(jù)它們產(chǎn)生的畸變,解調(diào)出被測(cè)物的三維信息。
頻閃光照明是將高頻率的光脈沖照射到物體上,攝像機(jī)拍攝要求與光源同步。
(3)按照照明方式可分為穹形光源、環(huán)形光源、平行光源、同軸光源、點(diǎn)光源、低角度光源、線(xiàn)光源、光柵等。
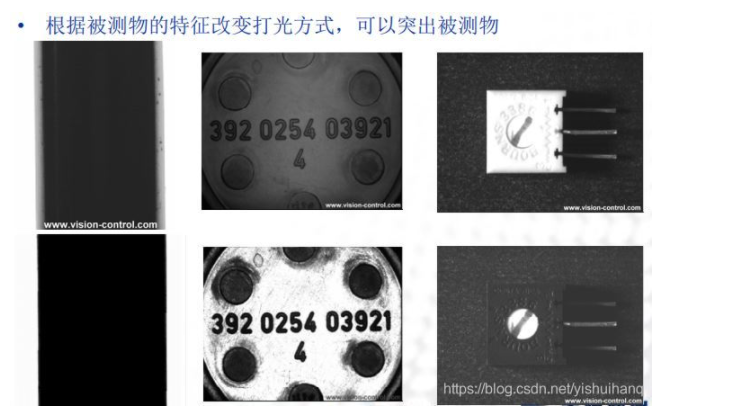
選擇光源的角度:根據(jù)期望的圖像效果,選擇不同入射角度的光源。
穹形光源,主要用于球型或曲面物體的缺陷檢測(cè)、不平坦的光滑表面字符的檢測(cè)、金屬或鏡面的表面檢測(cè)。如玻璃瓶、滾珠、小工件表面、塑料或鋁制容器等。
環(huán)形光照射,多用于集成電路料帶與管腳字符、金屬工件刻印字符、光滑表面劃痕、瓶口尺寸或裂痕、平面工件表面質(zhì)量檢測(cè)。
條形光源(可控照明,紅色,藍(lán)色,綠色單色光源)也叫條形燈是一種從側(cè)面打光的照明光源,常用的角度是45度,也有更小的角度。側(cè)光燈可以避免正面照射產(chǎn)生的強(qiáng)烈反光,同時(shí)還可以對(duì)邊緣部分實(shí)現(xiàn)高亮的照明。是一種在尺寸測(cè)量、外觀(guān)檢測(cè)方面應(yīng)用非常廣泛的一種照明方式。常用于:LCD缺陷的檢測(cè)、包裝文字檢測(cè)、包裝膜破損檢測(cè)、紙張質(zhì)量檢測(cè)、常規(guī)印刷質(zhì)量檢測(cè)、制造物裂紋的檢測(cè)、電子部件的形狀識(shí)別和大小的測(cè)量、各種線(xiàn)陣檢測(cè)等。
同軸光照射,圖像效果為明亮背景上的黑色特征,用于反光厲害的平面物體檢測(cè),能夠加強(qiáng)有差異角度的表面特征,增強(qiáng)表面紋理(劃痕、凹陷、壓印),減少陰影。如金屬、玻璃等光潔表面的劃痕和瑕疵檢測(cè),芯片和硅片的破損檢測(cè)、金屬件上的沖壓字符檢測(cè)、線(xiàn)路板焊點(diǎn)與符號(hào)、集成電路的管腳字符檢測(cè)等。
高角度照射,圖像整體較亮,適合表面不反光物體;
低角度照射,圖像背景為黑,特征為白,可以突出被測(cè)物輪廓及表面凹凸變化;
多角度照射,圖像整體效果較柔和,適合曲面物體檢測(cè);
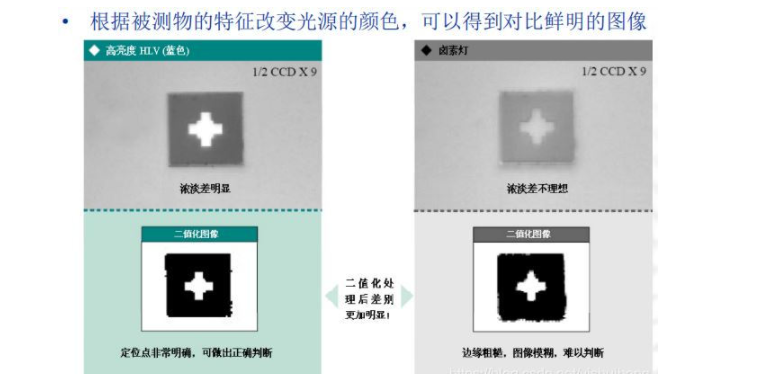
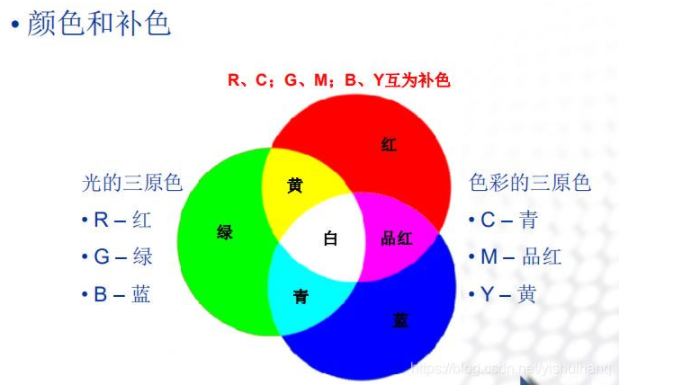
(a)考慮光源顏色和背景顏色:
使用與被測(cè)物同色系的光會(huì)使圖像變亮(如:紅光使紅色物體更亮);使用與被測(cè)物相反色系的光會(huì)使圖像變暗(如:紅光使藍(lán)色物體更暗、用藍(lán)光照射黃色物體,呈現(xiàn)黑色)。
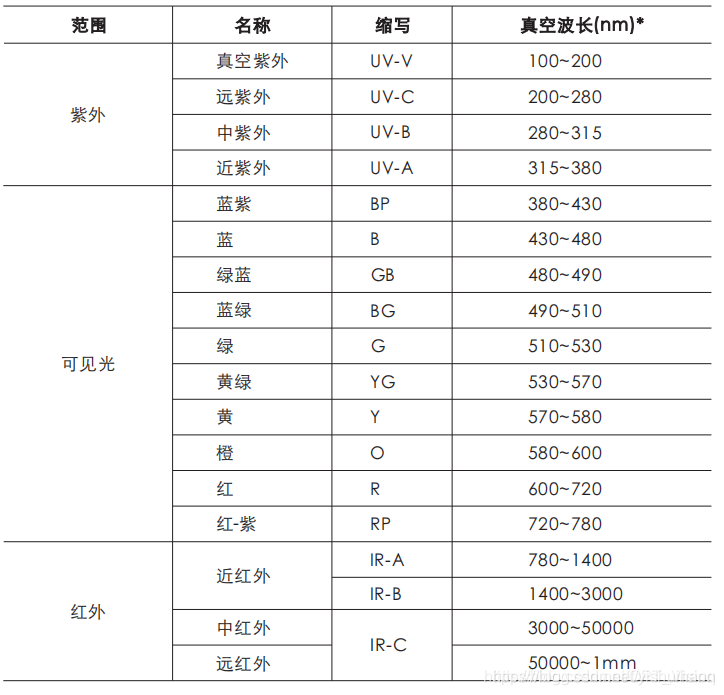
波長(zhǎng)越長(zhǎng),穿透能力越強(qiáng);波長(zhǎng)越短,擴(kuò)散能力越強(qiáng)。紅外的穿透能力強(qiáng),適合檢測(cè)透光性差的物體,如棕色口服液雜質(zhì)檢測(cè)。紫外對(duì)表面的細(xì)微特征敏感,適合檢測(cè)對(duì)比不夠明顯的地方,如食用油瓶上的文字檢測(cè)。
(b)選擇光源的形狀和尺寸:
主要分為圓形、方形和條形。通常情況下選用與被測(cè)物體形狀相同的光源,最終光源形狀以測(cè)試效果為準(zhǔn)。光源的尺寸選擇,要求保障整個(gè)視野內(nèi)光線(xiàn)均勻,略大于視野比較好。
(c)選擇是否用漫射光源:
如被測(cè)物體表面反光,最好選用漫反射光源。多角度的漫射照明使得被測(cè)物表面整體亮度均勻,圖像背景柔和,檢測(cè)特征不受背景干擾。

A、如何評(píng)價(jià)一個(gè)光源的好壞?
1) 對(duì)比度
對(duì)比度對(duì)機(jī)器視覺(jué)來(lái)說(shuō)非常重要。機(jī)器視覺(jué)應(yīng)用的照明的最重要的任務(wù)就
是使需要被觀(guān)察的特征與需要被忽略的圖像特征之間產(chǎn)生最大的對(duì)比度,從而易
于特征的區(qū)分。對(duì)比度定義為在特征與其周?chē)膮^(qū)域之間有足夠的灰度量區(qū)別。
好的照明應(yīng)該能夠保證需要檢測(cè)的特征突出于其他背景。
2) 魯棒性
魯棒性就是對(duì)環(huán)境有一個(gè)好的適應(yīng)。好的光源需要在實(shí)際工作中與其在實(shí)
驗(yàn)室中的有相同的效果 。
3) 亮度
當(dāng)選擇兩種光源的時(shí)候,最佳的選擇是選擇更亮的那個(gè)。光源的亮度不夠,
必然要加大光圈,從而減小了景深 。
4) 均勻性
均勻性是光源一個(gè)很中要的技術(shù)參數(shù)。均勻性好的光源使系統(tǒng)工作穩(wěn)定 。
5) 可維護(hù)性
可維護(hù)性主要指光源易于安裝,易于更換 。
6) 壽命及發(fā)熱量
光源的亮度不易衰減過(guò)快,這樣會(huì)影響系統(tǒng)的穩(wěn)定,增加維護(hù)的成本 。發(fā)
熱量大的燈亮度衰減快,光源的壽命也會(huì)受到很大影響。
B、如何依靠光源增強(qiáng)圖像對(duì)比度?
使用相同顏色的光或相近顏色的光源照射可以使被照射部分變亮;
使用相反顏色的光或相近顏色的光源照射可以使被照射部分變暗。
不同的波長(zhǎng),對(duì)物質(zhì)的穿透力(穿透率)不同,波長(zhǎng)越長(zhǎng),對(duì)物體的穿透力
愈強(qiáng),波長(zhǎng)越短,對(duì)物質(zhì)表面的擴(kuò)散率愈大。
C、選光源的一些技巧
? 需要前景與背景更大的對(duì)比度,可以考慮用黑白相機(jī)與彩色光源
? 環(huán)境光的問(wèn)題,嘗試用單色光源,配一個(gè)濾鏡
? 閃光曲面,考慮用散射圓頂光
? 閃光,平的,但粗糙的表面,嘗試用同軸散射光
? 看表面的形狀,考慮用暗視場(chǎng)(低角度) ? 檢測(cè)塑料的時(shí)候,嘗試用紫外或紅外光
? 需要通過(guò)反射的表面看特征,嘗試用低角度線(xiàn)光源(暗視場(chǎng)) ? 單個(gè)光源不能有效解決問(wèn)題時(shí)考慮用組合光源
? 頻閃能夠產(chǎn)生比常亮照明 20 倍強(qiáng)的光
幾種常用的打光實(shí)例:
顏色與補(bǔ)色5

明暗視野6

明暗視野7
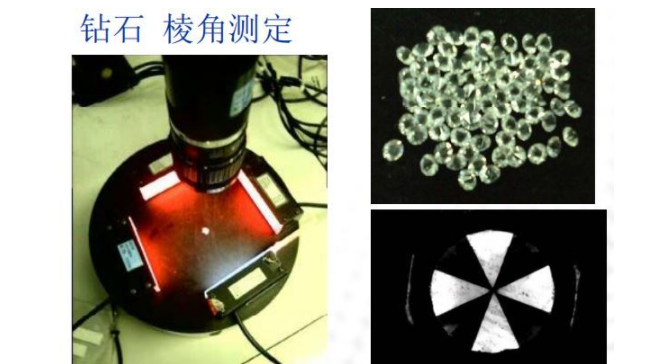
明暗視野8
選擇光源的前提
可見(jiàn)光與近不可見(jiàn)光波段波譜
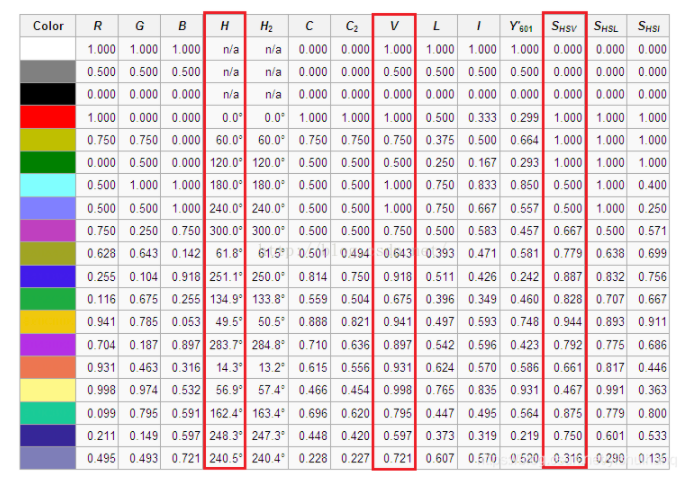
HSV顏色對(duì)照表
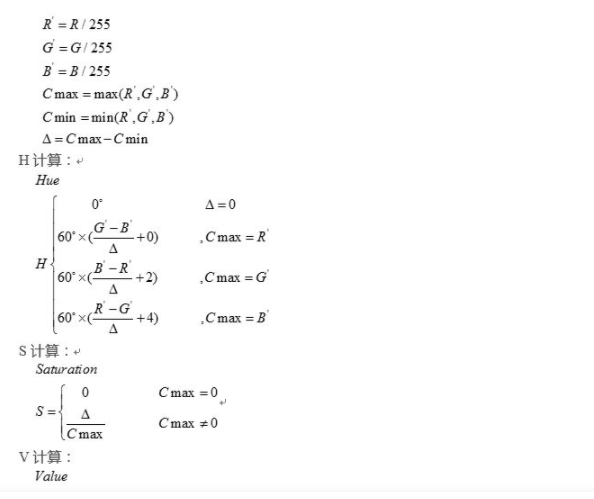
HSV(Hue, Saturation, Value)色彩空間是一種區(qū)別與RGB的表示形式。
其中H為色調(diào),用角度度量,取值范圍為0°~360°,從紅色開(kāi)始按逆時(shí)針?lè)较蛴?jì)算,紅色為0°,綠色為120°,藍(lán)色為240°。它們的補(bǔ)色是:黃色為60°,青色為180°,品紅為300°;
S為飽和度,飽和度S表示顏色接近光譜色的程度。一種顏色,可以看成是某種光譜色與白色混合的結(jié)果。其中光譜色所占的比例愈大,顏色接近光譜色的程度就愈高,顏色的飽和度也就愈高。飽和度高,顏色則深而艷。光譜色的白光成分為0,飽和度達(dá)到最高。通常取值范圍為0%~100%,值越大,顏色越飽和。
V為亮度,明度表示顏色明亮的程度,對(duì)于光源色,明度值與發(fā)光體的光亮度有關(guān);對(duì)于物體色,此值和物體的透射比或反射比有關(guān)。通常取值范圍為0%(黑)到100%(白)。
RGB 轉(zhuǎn) HSV公式:
2、相機(jī)的選擇
(1)工業(yè)數(shù)字相機(jī)的分類(lèi):
工業(yè)相機(jī)按照芯片類(lèi)型可以分為CCD相機(jī)、CMOS相機(jī);
按照輸出色彩可以分為單色(黑白)相機(jī)、彩色相機(jī);
按照傳感器的結(jié)構(gòu)特性可以分為線(xiàn)陣相機(jī)(黑白攝像機(jī)、3Line彩色相機(jī)、3CCD彩色相機(jī)(分光棱鏡)、面陣相機(jī)(黑白攝像機(jī)、Bayer彩色相機(jī)、3CCD彩色相機(jī)(分光棱鏡);
按照輸出信號(hào)方式可以分為模擬相機(jī)(PAL(黑白為CCIR))、NTSC(黑白為EIA))、數(shù)字相機(jī)(IEEE1394、USB2.0、Camera Link、GigE);
按照掃描方式可以分為隔行掃描相機(jī)、逐行掃描相機(jī);
按照分辨率大小可以分為普通分辨率相機(jī)、高分辨率相機(jī);
按照輸出信號(hào)速度可以分為普通速度相機(jī)、高速相機(jī);
按照響應(yīng)頻率范圍可以分為可見(jiàn)光(普通)相機(jī)、紅外相機(jī)、紫外相機(jī)等。
(2)相機(jī)的主要參數(shù)
相機(jī)的主要參數(shù):
①分辨率;②速度(幀頻/行頻);③噪聲;(三) 曝光方式(Exposure)和快門(mén)速度(Shutter);④信噪比;⑤動(dòng)態(tài)范圍;⑥像元深度;⑦光譜響應(yīng);⑧光學(xué)接口。
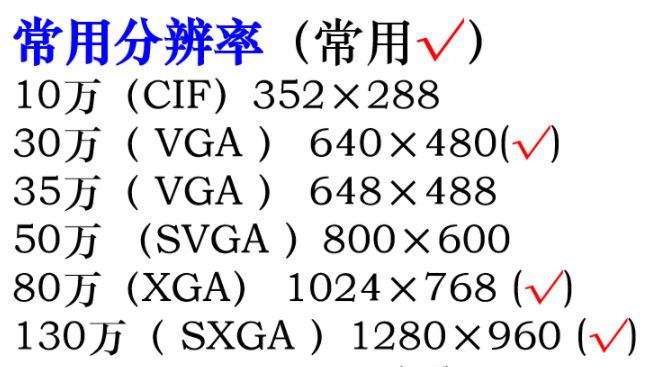
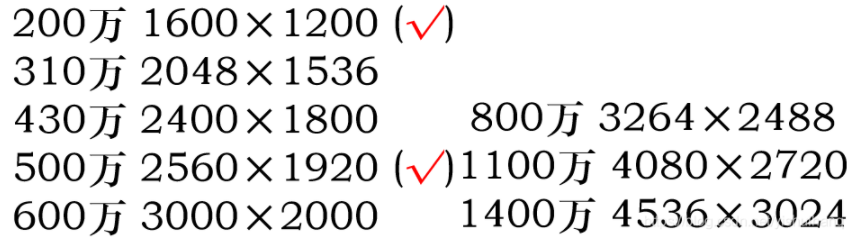
①分辨率
?分辨率是相機(jī)最基本的參數(shù),由相機(jī)所采用的芯片分辨率決定,是芯片靶面排列的像元數(shù)量。
通常面陣相機(jī)的分辨率用水平和垂直分辨率兩個(gè)數(shù)字表示,如:1920(H)x 1080(V),前面的數(shù)字表示每行的像元數(shù)量,即共有 1920 個(gè)像元,后面的數(shù)字表示像元的行數(shù),即 1080 行。現(xiàn)在相機(jī)的分辨率通常表示多少 K,如1K(1024),2K(2048), 3K(4096)等。
在采集圖像時(shí),相機(jī)的分辨率對(duì)圖像質(zhì)量有很大的影響。在對(duì)同樣大的視場(chǎng)(景物范圍)成像時(shí),分辨率越高,對(duì)細(xì)節(jié)的展示越明顯。
②速度(最大幀率(Frame Rate)/行頻(Line Rate))
?相機(jī)的幀頻/行頻表示相機(jī)采集圖像的頻率,通常面陣相機(jī)用幀頻表示,單位 fps(Frame Per second),如 30fps,表示相機(jī)在1秒鐘內(nèi)最多能采集 30 幀圖像;線(xiàn)陣相機(jī)通常用行頻便是單位 KHz,如 12KHz 表示相機(jī)在1秒鐘內(nèi)最多能采集 12000 行圖像數(shù)據(jù)。
相機(jī)采集傳輸圖像的速率,對(duì)于面陣相機(jī)一般為每秒采集的幀數(shù)(Frames/Sec.),對(duì)于線(xiàn)陣相機(jī)為每秒采集的行數(shù)(Lines/Sec.)。
速度是相機(jī)的重要參數(shù),在實(shí)際應(yīng)用中很多時(shí)候需要對(duì)運(yùn)動(dòng)物體成像。相機(jī)的速度需要滿(mǎn)足一定要求,才能清晰準(zhǔn)確的對(duì)物體成像。相機(jī)的幀頻和行頻首先受到芯片的幀頻和行頻的影響,芯片的設(shè)計(jì)最高速度則主要是由芯片所能承受的最高時(shí)鐘決定。
(三) 曝光方式(Exposure)和快門(mén)速度(Shutter)? ? ??
? ? ? ? 對(duì)于線(xiàn)陣相機(jī)都是逐行曝光的方式,可以選擇固定行頻和外觸發(fā)同步的采集方式,曝光時(shí)間可以與行周期一致,也可以設(shè)定一個(gè)固定的時(shí)間;面陣相機(jī)有幀曝光、場(chǎng)曝光和滾動(dòng)行曝光等幾種常見(jiàn)方式,數(shù)字相機(jī)一般都提供外觸發(fā)采圖的功能。
快門(mén)速度一般可到10微秒,高速相機(jī)還可以更快。
③噪聲
相機(jī)的噪聲是指成像過(guò)程中不希望被采集到的,實(shí)際成像目標(biāo)外的信號(hào)。
根據(jù)歐洲相機(jī)測(cè)試標(biāo)準(zhǔn)EMVA1288 中,定義的相機(jī)中的噪聲從總體上可分為兩類(lèi):一類(lèi)是由有效信號(hào)帶來(lái)的符合泊松分布的統(tǒng)計(jì)漲落噪聲,也叫散粒噪聲(shot noise),這種噪聲對(duì)任何相機(jī)都是相同的,不可避免,有其確定的計(jì)算公式(噪聲的平方=信號(hào)的均值);第二類(lèi)是相機(jī)自身固有的與信號(hào)無(wú)關(guān)的噪聲,它是由圖像傳感器讀出電路、相機(jī)信號(hào)處理與放大電路等帶來(lái)的噪聲,每臺(tái)相機(jī)的固有噪聲都不一樣。另外,對(duì)數(shù)字相機(jī)來(lái)說(shuō),對(duì)視頻信號(hào)進(jìn)行模擬轉(zhuǎn)換時(shí)會(huì)產(chǎn)生量化噪聲,量化位數(shù)越高,噪聲越低。
④信噪比
?相機(jī)的信噪比定義為圖像中信號(hào)與噪聲的比值(有效信號(hào)平均灰度值與噪聲均方根的比值),代表了圖像的質(zhì)量,圖像信噪比越高,圖像質(zhì)量越好。(信噪比高的相機(jī)性能較好)
⑤動(dòng)態(tài)范圍
?相機(jī)的動(dòng)態(tài)范圍表明相機(jī)探測(cè)光信號(hào)的范圍,動(dòng)態(tài)范圍可用兩種方法來(lái)界定,一種是光學(xué)動(dòng)態(tài)范圍,指飽和時(shí)最大光強(qiáng)與等價(jià)于噪聲輸出的光強(qiáng)的比值,由芯片的特性決定。另一種是電子動(dòng)態(tài)范圍,是指飽和電壓和噪聲電壓之間的比值。
對(duì)于固定相機(jī)其動(dòng)態(tài)范圍是一個(gè)定值,不隨外界條件變化而變化。在線(xiàn)性響應(yīng)處,相機(jī)的動(dòng)態(tài)范圍定義為飽和曝光量與噪聲等效曝光量的比值:
動(dòng)態(tài)范圍可用倍數(shù)、dB 或 Bit 等方式來(lái)表示。動(dòng)態(tài)范圍大,則相機(jī)對(duì)不同的光照強(qiáng)度有更強(qiáng)的適應(yīng)能力。
⑥像元/像素深度
數(shù)字相機(jī)輸出的數(shù)字信號(hào),即像元灰度值,具有特殊的比特位數(shù),稱(chēng)為像元深度。即每像素?cái)?shù)據(jù)的位數(shù),一般常用的是8Bit,對(duì)于數(shù)字相機(jī)機(jī)一般還會(huì)有10Bit、12Bit、14Bit等。
對(duì)于黑白相機(jī)這個(gè)值的方位通常是 8-16bit。像元深度定義了灰度由暗道亮的灰階數(shù)。例如,對(duì)于 8bit 的相機(jī) 0 代表全暗而 255代表全亮。介于 0 和 255 之間的數(shù)字代表一定的亮度指標(biāo)。10bit 數(shù)據(jù)就有 1024 個(gè)灰階,而 12bit 有 4096 個(gè)灰階。每一個(gè)應(yīng)用我們都要仔細(xì)考慮是否需要非常細(xì)膩的灰度等級(jí)。從 8bit 上升到 10bit 或者 12bit 的確可以增強(qiáng)測(cè)量的精度,但是也同時(shí)降低了系統(tǒng)的速度,并且提高了系統(tǒng)集成的難度(線(xiàn)纜增加,尺寸變大),因此我們也要慎重選擇。
⑦光譜響應(yīng)
光譜響應(yīng)是指相機(jī)對(duì)于不同波長(zhǎng)光線(xiàn)的響應(yīng)能力,通常指其所采用芯片的光譜響應(yīng)。通常用光譜曲線(xiàn)表示,橫軸表示不同波長(zhǎng),縱軸表示量子效率。按照響應(yīng)光譜不同也把相機(jī)分為可見(jiàn)光相機(jī)(400nm—1000nm,峰值在 500nm—600nm 之間),紅外相機(jī)(響應(yīng)波長(zhǎng)在 700nm 以上),紫外相機(jī)(可以響應(yīng)到 200nm—400nm的短波),我們需要根據(jù)接收被測(cè)物發(fā)光波長(zhǎng)的不同來(lái)選擇不同的光譜響應(yīng)的相機(jī)。
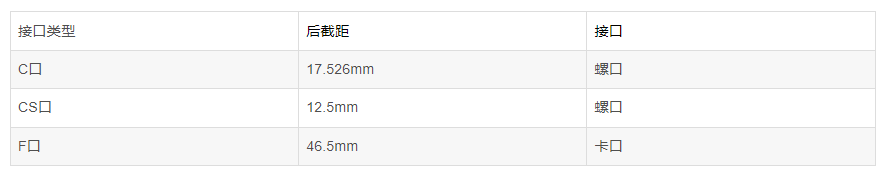
⑧光學(xué)接口/接口類(lèi)型
?光學(xué)接口是指相機(jī)與鏡頭之間的借口,常用的鏡頭的借口有 C 口,CS 口,F(xiàn) 口。下表提供了關(guān)于鏡頭安裝及后焦距的信息。其中 M42 鏡頭適配器源于高端攝像標(biāo)準(zhǔn)。另一方面,相機(jī)的 Z 軸均依據(jù)所提供的適配器而進(jìn)行了優(yōu)化,一般情況下不要輕易拆卸鏡頭適配器。
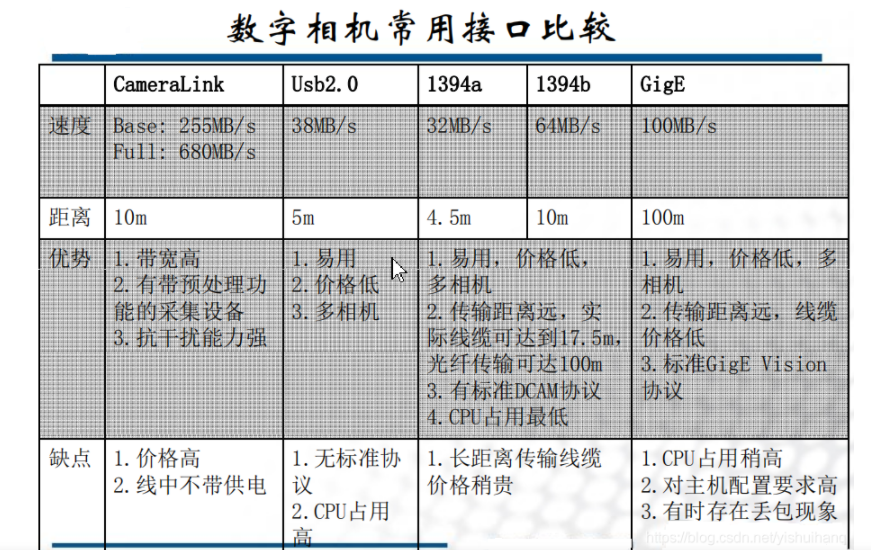
(3)工業(yè)數(shù)字?jǐn)z像機(jī)主要接口類(lèi)型
主要有:Usb2.0、IEEE 1394、CameraLink、GiggE。
目前市面上工業(yè)相機(jī)大多是基于CCD或CMOS芯片的相機(jī)。
CCD攝像機(jī),CCD稱(chēng)為電荷耦合器件,CCD實(shí)際上只是一個(gè)把從圖像半導(dǎo)體中出來(lái)的電子有組織地儲(chǔ)存起來(lái)的方法。優(yōu)點(diǎn):圖像質(zhì)量高、靈敏度高、對(duì)比度高;缺點(diǎn):有Blooming現(xiàn)象、不能直接訪(fǎng)問(wèn)每個(gè)像素、沒(méi)有片上處理功能。
CMOS攝像機(jī),CMOS稱(chēng)為“互補(bǔ)金屬氧化物半導(dǎo)體”,CMOS實(shí)際上只是將晶體管放在硅塊上的技術(shù),沒(méi)有更多的含義。CMOS可以將光敏元件、放大器、A/D轉(zhuǎn)換器、存儲(chǔ)器、數(shù)字信號(hào)處理器和計(jì)算機(jī)接口控制電路集成在一塊硅片上。優(yōu)點(diǎn):體積小結(jié)構(gòu)簡(jiǎn)單、片上處理功能多、低功耗、沒(méi)有Blooming現(xiàn)象、能直接訪(fǎng)問(wèn)單個(gè)像素、高動(dòng)態(tài)范圍(120dB)、幀率可以更高;缺點(diǎn):一致性差、光靈敏度差、噪聲大。
CCD傳感器相機(jī)適合高速動(dòng)態(tài);
CMOS傳感器相機(jī)適合低速動(dòng)態(tài)或靜止。
相對(duì)于CCD傳感器,CMOS傳感器的隨機(jī)讀取特性使其容易實(shí)現(xiàn)圖像的矩形感興趣區(qū)域(AOI)讀出方式。這一特性使得CMOS能針對(duì)較小的AOI時(shí)可以獲得更高的幀率。CMOS傳感器的另一優(yōu)點(diǎn)就是,讀出速度快。CMOS傳感器的缺點(diǎn)是填充因子很低,通常使用微鏡來(lái)提高其填充因子。
CCD和COMS區(qū)別:
? CCD的優(yōu)勢(shì)在于成像質(zhì)量好;
? CMOS價(jià)格比CCD便宜;
? CMOS電源消耗量比CCD低;
? CCD用于動(dòng)態(tài)測(cè)量;
? CMOS 用于低速或靜態(tài)測(cè)量。但是現(xiàn)在全
局曝光的CMOS也可用于動(dòng)態(tài)測(cè)量;
? 現(xiàn)在CCD是主流,但CMOS正在趕上,而且CMOS是未來(lái)。
注:CCD是全局曝光,而CMOS既存在全局曝光又有卷簾曝光。
如何選擇工業(yè)相機(jī):
? ? ? ? 首先要弄明白的是自己的檢測(cè)任務(wù),是靜態(tài)拍照還是動(dòng)態(tài)拍照、拍照的頻率是多少、是做缺陷檢測(cè)還是尺寸測(cè)量或者是定位、產(chǎn)品的大小(拍攝視野)是多少、需要達(dá)到的精度多少、所用軟件的性能、現(xiàn)場(chǎng)環(huán)境情況如何、有沒(méi)有其它的特殊要求等。
如果是動(dòng)態(tài)拍照,運(yùn)動(dòng)速度是多少,根據(jù)運(yùn)動(dòng)速度選擇最小曝光時(shí)間以及是否需要逐行掃描的相機(jī);而相機(jī)的幀率(最高拍照頻率)跟像素有關(guān),通常分辨率越高幀率越低,不同品牌的工業(yè)相機(jī)的幀率略有不同。
? ? ? ? 根據(jù)檢測(cè)任務(wù)的不同、產(chǎn)品的大小、需要達(dá)到的分辨率以及所用軟件的性能可以計(jì)算出所需工業(yè)相機(jī)的分辨率;現(xiàn)場(chǎng)環(huán)境最要考慮的是溫度、濕度、干擾情況以及光照條件來(lái)選擇不同的工業(yè)相機(jī)。
考慮待觀(guān)察或待測(cè)量物體的精度,根據(jù)精度選擇工業(yè)相機(jī)分辨率。
相機(jī)像素精度=單方向視野范圍大小/相機(jī)單方向分辨率。
則相機(jī)單方向分辨率=單方向視野范圍大小/理論精度。


實(shí)例1:
實(shí)例2:
假設(shè)檢測(cè)一個(gè)物體的表面劃痕,要求拍攝的物體大小為10*8mm,而要求的檢測(cè)精度是0.01mm。
? ? ? ?首先假設(shè)要拍攝的視野范圍在12*10mm,那么相機(jī)的最低分辨率應(yīng)該選擇在:(12/0.01)*(10/0.01)=1200*1000,約為120萬(wàn)像素的相機(jī),也就是說(shuō)一個(gè)像素對(duì)應(yīng)一個(gè)缺陷檢測(cè)的話(huà)那么最低分辨率必須不少于120萬(wàn)像素,但市面上常見(jiàn)的是130萬(wàn)像素的相機(jī),因此一般而言是選用130萬(wàn)像素的相機(jī)。
? ? ? ? 但實(shí)際問(wèn)題是如果一個(gè)像素對(duì)應(yīng)一個(gè)缺陷的話(huà),那么這樣的系統(tǒng)一定會(huì)極不穩(wěn)定,因?yàn)殡S便的一個(gè)干擾像素點(diǎn)都可能被誤認(rèn)為缺陷,所以為了提高系統(tǒng)的精準(zhǔn)度和穩(wěn)定性,最好取缺陷的面積在3到4個(gè)像素以上,這樣選擇的相機(jī)也就在130萬(wàn)乘3以上,即最低不能少于300萬(wàn)像素,通常采用300萬(wàn)像素的相機(jī)為最佳(我見(jiàn)過(guò)最多的人抱著亞像素不放說(shuō)要做到零點(diǎn)幾的亞像素,那就不用這么高分辨率的相機(jī)了。
相機(jī)的曝光時(shí)間
相機(jī)的最小曝光時(shí)間,可以決定目標(biāo)的運(yùn)動(dòng)速度。或者反過(guò)來(lái)說(shuō),目標(biāo)的運(yùn)動(dòng)速度,對(duì)相機(jī)的最小曝光時(shí)間提出了要求。假設(shè)我們的目標(biāo)運(yùn)動(dòng)速度是1mm/S,我們的測(cè)量精度是0.01mm/pixel,那么我們必須考慮,物體的運(yùn)動(dòng)引起的拖影必須要小于我們的精度0.01mm,目標(biāo)移動(dòng)0.01mm,需要用時(shí)10ms,這就要求我們的相機(jī)的曝光時(shí)間必須小于10ms,如果大于這個(gè)曝光時(shí)間,那么僅僅物體運(yùn)動(dòng)引起的模糊就會(huì)大于0.01,這時(shí)我們的精度已經(jīng)無(wú)法達(dá)到0.01了。
通常來(lái)說(shuō),物體運(yùn)動(dòng)引起的模糊應(yīng)該比我們要求的測(cè)量精度小一個(gè)數(shù)量級(jí),這樣可以減少其對(duì)系統(tǒng)的影響,一般我們的工業(yè)相機(jī)最快曝光時(shí)間可以達(dá)到幾十至一百多微秒的樣子。如此短的曝光時(shí)間,對(duì)光能量要求比較大,因此需要選擇合適的光源與光源控制器。
3、鏡頭的選擇
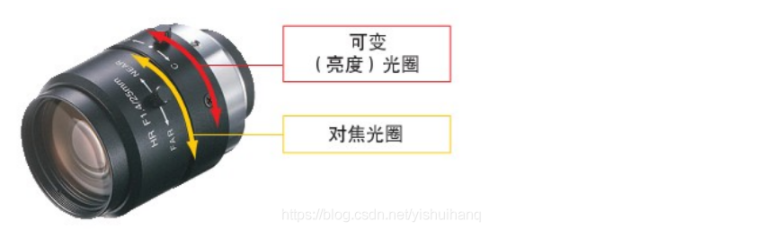
工業(yè)相機(jī)鏡頭由多個(gè)透鏡、可變(亮度)光圈和對(duì)焦環(huán)組成。如下圖所示,在使用時(shí)由操作者觀(guān)察相機(jī)顯示屏來(lái)調(diào)整可變光圈和焦點(diǎn),以確保圖像的明亮程度及清晰度(有些鏡頭有固定調(diào)節(jié)系統(tǒng))。
(1)鏡頭的接口
鏡頭的接口尺寸是有國(guó)際標(biāo)準(zhǔn)的,共有三種接口型式,即F型、C型、CS型,其他有M42、萊卡、哈蘇、AK。F型接口是通用型接口,一般適用于焦距大于25mm的鏡頭;而當(dāng)物鏡的焦距約小于25mm時(shí),因物鏡的尺寸不大,便采用C型或CS型接口。
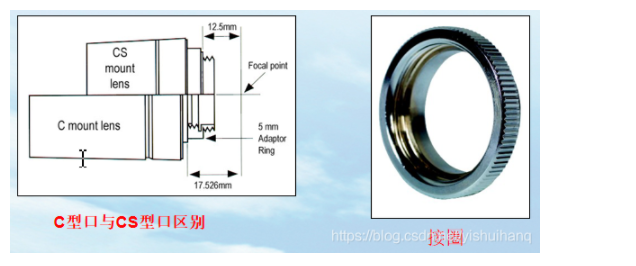
C接口和CS接口的區(qū)別:
①C與CS接口的區(qū)別在于鏡頭與攝像機(jī)接觸面至鏡頭焦平面(攝像機(jī) CCD光電感應(yīng)器應(yīng)處的位置)的距離不同,C型接口此距離為17.526mm,CS型接口此距離為12.5mm。
② C型鏡頭與C型攝像機(jī),CS型鏡頭與CS型攝像機(jī)可以配合使用。C型鏡頭與CS型攝像機(jī)之間增加一個(gè) 5mm的C/CS轉(zhuǎn)接環(huán)可以配合使用。CS型鏡頭與C型攝像機(jī)無(wú)法配合使用。
(2)工業(yè)鏡頭的基本參
鏡頭選擇應(yīng)注意:①焦距? ②目標(biāo)高度 ③影像高度? ④放大倍數(shù)? ⑤影像至目標(biāo)的距離? ⑥中心點(diǎn)/節(jié)點(diǎn)? ⑦畸變。
<1> 視場(chǎng)(Field of view,即FOV,也叫視野范圍)
? ? ? ? ?視場(chǎng)(Field of view,即FOV,也叫視野范圍):指觀(guān)測(cè)物體的可視范圍,也就是充滿(mǎn)相機(jī)采集芯片的物體部分。(視場(chǎng)范圍是選型中必須要了解的)
? ? Y=f*tanθ,Y:像的大小,f:焦距,θ:半畫(huà)角
? ? θ=2tan-1*y/2f
? ? 例:1/2寸攝像機(jī)配12.5mm鏡頭時(shí)畫(huà)面橫向的視場(chǎng)面是:
? ? θ=2tan-1*6.4/2*12.5=28.72
<2> 工作距離(Working Distance,即WD)
? ? ? ?工作距離(Working Distance,即WD):指從鏡頭前部到受檢驗(yàn)物體的距離。即清晰成像的表面距離(選型必須要了解的問(wèn)題,工作距離是否可調(diào)?包括是否有安裝空間等)。
<3> 分辨率
? ? ? ? 分辨率:圖像系統(tǒng)可以測(cè)到的受檢驗(yàn)物體上的最小可分辨特征尺寸。在多數(shù)情況下,視野越小,分辨率越好。(在實(shí)際選擇鏡頭時(shí),鏡頭尺寸不能小于相機(jī)芯片尺寸,一定要要大于或等于相機(jī)芯片尺寸)
影響分辨率的主要因素:鏡頭結(jié)構(gòu)、材質(zhì)、加工精度等。
其它因素:
鏡頭光圈越大,分辨率越高;
光波長(zhǎng)度,波長(zhǎng)越短分辨率越高;
同檔次的固定焦距鏡頭比變焦鏡頭分辨率高;
短焦鏡頭一般邊緣分辨率比中心低;長(zhǎng)焦鏡頭一般中心比邊緣分辨率低。
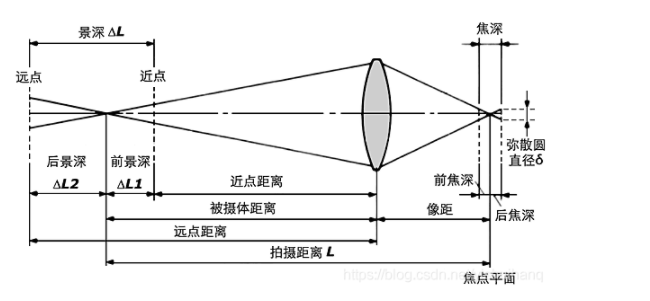
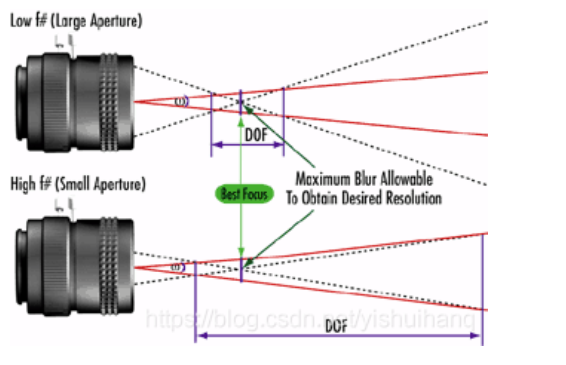
<4> 景深(Depth of view,即DOF)
景深(Depth of view,即DOF):物體離最佳焦點(diǎn)較近或較遠(yuǎn)時(shí),鏡頭保持所需分辨率的能力(需要了解客戶(hù)對(duì)景深是否有特殊要求?)
景深和鏡頭的焦距、光圈、物距有關(guān):
光圈越小,景深越大;
拍攝距離越大,景深越大;
焦距越短,景深越大。
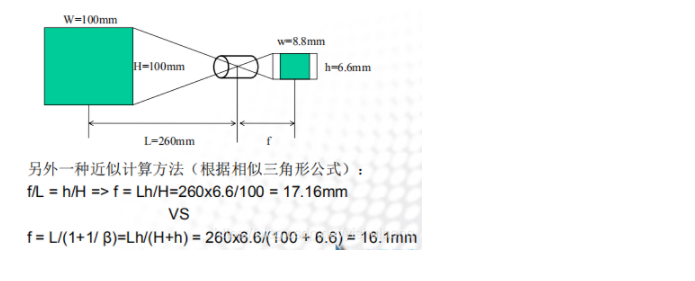
<5> 焦距(f)
焦距(f):是光學(xué)系統(tǒng)中衡量光的聚集或發(fā)散的度量方式,指從透鏡的光心到光聚集之焦點(diǎn)的距離。亦是照相機(jī)中,從鏡片中心到底片或CCD等成像平面的距離。(需要記住的重要公式)
? ? f = {工作距離/視野范圍長(zhǎng)邊(或短邊)}*CCD長(zhǎng)邊(或短)
焦距大小的影響情況:
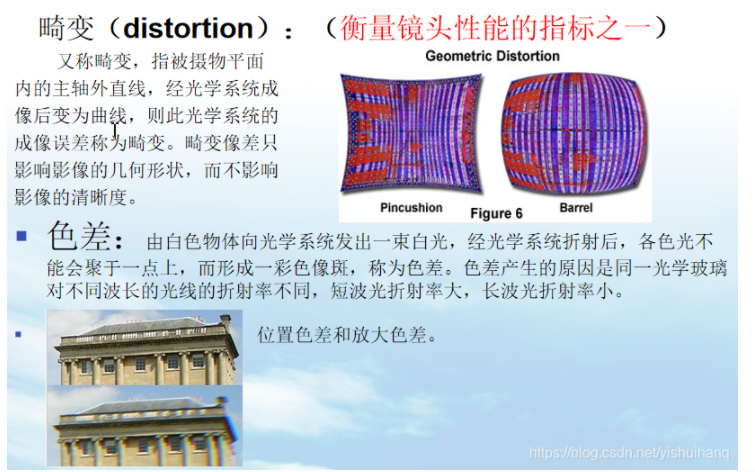
焦距越小,景深越大;焦距越小,畸變?cè)酱螅唤咕嘣叫。瑵u暈現(xiàn)象越嚴(yán)重,使像差邊緣的照度降低。
===============================================================================
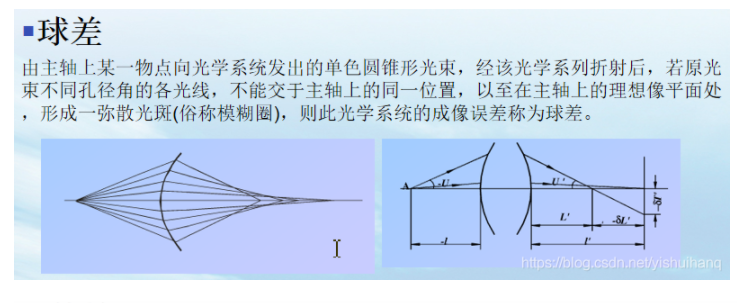
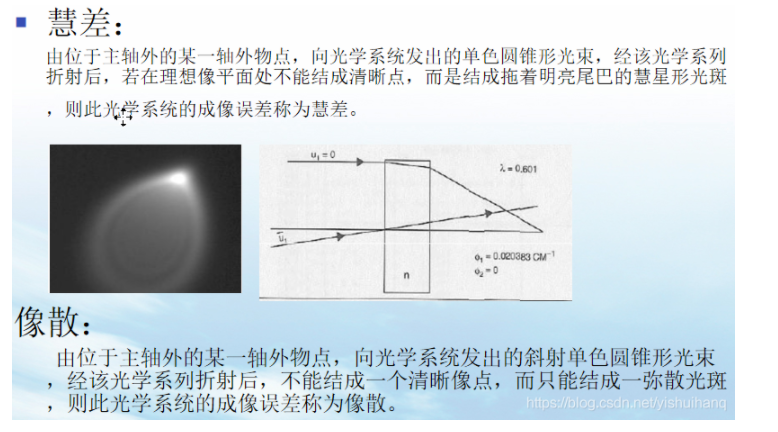
像差是影響圖像質(zhì)量的重要方面,常見(jiàn)的像差有如下六種:球差、慧差、像散、場(chǎng)曲、畸變、色差。

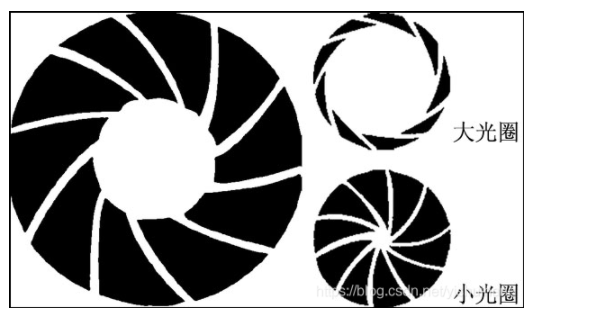
<6> 光圈與F值
光圈是一個(gè)用來(lái)控制鏡頭通光量裝置,它通常是在鏡頭內(nèi)。表達(dá)光圈大小我們是用F值,如f1.4,f2,f2.8。
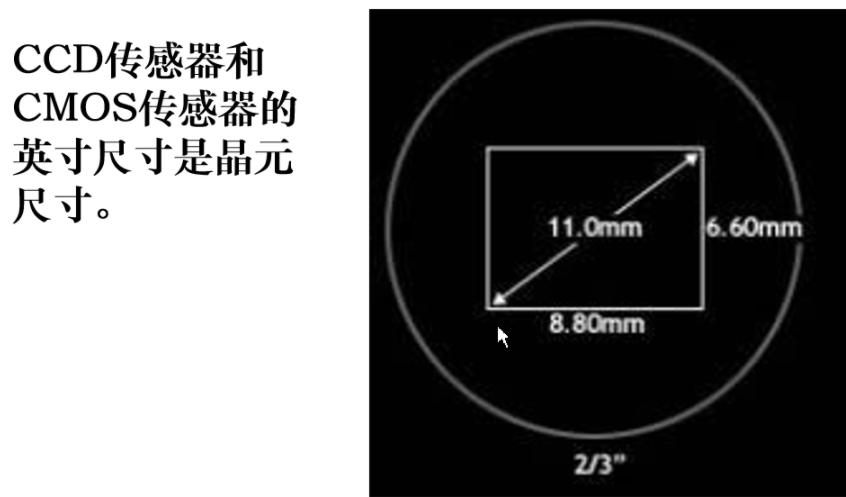
<8> 感光芯片尺寸
相機(jī)感光芯片的有效區(qū)域尺寸,一般指水平尺寸。這個(gè)參數(shù)對(duì)于決定合適的鏡頭縮放比例以獲取想要的視場(chǎng)非常重要。鏡頭主要縮放比例 (PMAG) 由感光芯片的尺寸和視場(chǎng)的比率來(lái)定義。雖然基本參數(shù)包括感光芯片的尺寸和視場(chǎng),但PMAG卻不屬于基本參數(shù)。
<9> 光學(xué)放大倍數(shù)
用于計(jì)算主要縮放比例的公式如下:
? ? ?PMAG? ?=? CCD Size /? FOV
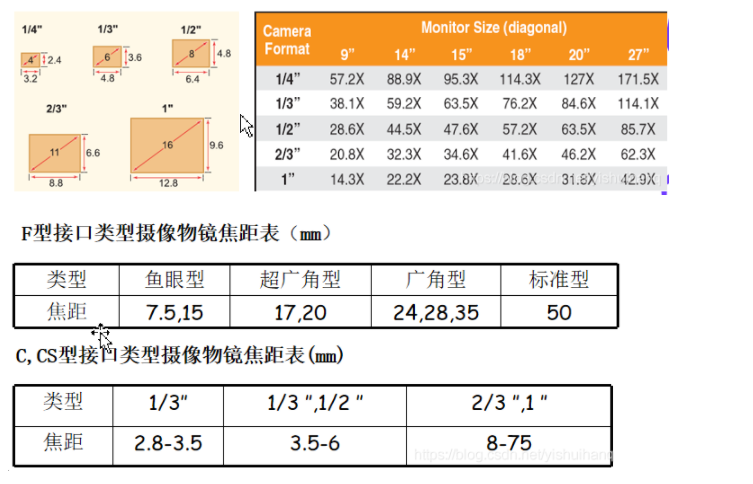
顯示放大倍數(shù):
顯示放大倍率在顯微中應(yīng)用非常廣泛,被測(cè)物體的顯示放大倍率取決于三個(gè)因素:鏡頭光學(xué)倍率、工業(yè)相機(jī)感光芯片的尺寸(靶面大小)、顯示器尺寸。
顯示放大倍率=鏡頭光學(xué)倍率×顯示器尺寸×25.4/耙面對(duì)角線(xiàn)尺寸。
工業(yè)鏡頭各參數(shù)間相互影響關(guān)系:
光圈大小的影響情況:
光圈越大,圖像亮度越高;景深越小;分辨率越高;
像場(chǎng)中央與邊緣:
一般像場(chǎng)中心較邊緣分辨率高;像場(chǎng)中心較邊緣光場(chǎng)照度高。
光波長(zhǎng)度的影響:
在相同的工業(yè)相機(jī)及鏡頭參數(shù)條件下,照明光源的光波波長(zhǎng)越短,得到的圖像的分辨力越高。所以在需要精密尺寸及位置測(cè)量的視覺(jué)系統(tǒng)中,盡量采用短波長(zhǎng)的單色光作為照明光源,對(duì)提高系統(tǒng)精度有很大的作用。
(3)鏡頭的分類(lèi)
為了適應(yīng)不同的應(yīng)用場(chǎng)合,鏡頭有多種類(lèi)型,從不同的角度,就有不同的劃分方法:
按光學(xué)放大倍率及焦距劃分:
a、顯微鏡:體視顯微鏡、生物顯微鏡、金相顯微鏡、測(cè)量顯微鏡
b、常規(guī)鏡頭:
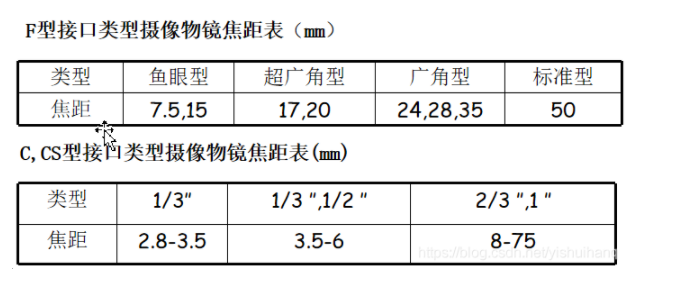
魚(yú)眼鏡頭:6-16mm
超廣角鏡頭:17-21mm
廣角鏡頭:24-35mm
標(biāo)準(zhǔn)鏡頭:45-75mm
長(zhǎng)焦鏡頭:150-300mm
超長(zhǎng)焦鏡頭:300mm以上
c、特殊鏡頭:
微距鏡頭
遠(yuǎn)距鏡頭
遠(yuǎn)心鏡頭
紅外鏡頭
紫外鏡頭
按其它性能劃分:
固定焦距鏡頭;
變焦鏡頭:
自動(dòng)變焦
手動(dòng)變焦
不同接口方式的鏡頭:
C接口(后截距17.526mm)
CS接口(后截距12.5mm)
F接口(尼康口)
M42
其它:哈蘇、徠卡、AK
各種鏡頭常用配件:
近拍接圈
偏振鏡
濾色片
UV鏡
雷登鏡
增溫鏡
各色濾鏡
帶通濾鏡
增倍鏡
分光鏡
棱鏡
遠(yuǎn)心鏡頭特性
? ? ? 遠(yuǎn)心鏡頭(Telecentric lens),主要是為糾正傳統(tǒng)鏡頭的視差而特殊設(shè)計(jì)的鏡頭,它可以在一定的物距范圍內(nèi),使得到的圖像放大倍率不會(huì)隨物距的變化而變化,這對(duì)被測(cè)物不在同一物面上的情況是非常重要的應(yīng)用。此外,遠(yuǎn)心鏡頭(Telecentric lens)相比普通鏡頭,還具有低畸變,高景深,高分辨力等特性 。遠(yuǎn)心鏡頭由于其特有的平行光路設(shè)計(jì)一直為對(duì)鏡頭畸變要求很高的機(jī)器視覺(jué)應(yīng)用場(chǎng)合所青睞,廣泛應(yīng)用于半導(dǎo)體、機(jī)械零部件,科研、激光測(cè)徑,印鈔等相關(guān)行業(yè),主要完成精密測(cè)量、定位等工作任務(wù)。
? ?1.遠(yuǎn)心特性? 非遠(yuǎn)心鏡頭下圖光學(xué)系統(tǒng)無(wú)法確保視場(chǎng)內(nèi)一致的放大率,于是總會(huì)造成測(cè)量精度的下降。
? ?2.低畸變特性? 大多數(shù)精確測(cè)量的場(chǎng)合需要對(duì)微小畸變進(jìn)行標(biāo)定,優(yōu)秀的遠(yuǎn)心鏡頭廠(chǎng)家采集精確的灰度圖像并進(jìn)行精確分析以測(cè)量畸變,使得遠(yuǎn)心鏡頭的畸變?nèi)绱宋⑿。鎸?shí)的還原圖像。
? ?3.高景深范圍和高解析度過(guò)小的景深會(huì)引起對(duì)比度的下降,結(jié)果會(huì)降低分辨力。遠(yuǎn)心鏡頭具有高的景深范圍和解析度,滿(mǎn)足各種不同的測(cè)試要求。
遠(yuǎn)心鏡頭與普通鏡頭對(duì)比
? ? ?遠(yuǎn)心工業(yè)鏡頭主要是為糾正傳統(tǒng)工業(yè)鏡頭的視差而特殊設(shè)計(jì)的鏡頭,它可以在一定的物距范圍內(nèi),使得到的圖像放大倍率不會(huì)隨物距的變化而變化,這對(duì)被測(cè)物不在同一物面上的情況是非常重要的應(yīng)用。
? ? ?普通工業(yè)鏡頭目標(biāo)物體越靠近鏡頭(工作距離越短),所成的像就越大。在使用普通鏡頭進(jìn)行尺寸測(cè)量時(shí),會(huì)存在如下問(wèn)題:
? ?1)由于被測(cè)量物體不在同一個(gè)測(cè)量平面,而造成放大倍率的不同;
? ?2)鏡頭畸變大
? ?3)視差也就是當(dāng)物距變大時(shí),對(duì)物體的放大倍數(shù)也改變;
? ?4)鏡頭的解析度不高;
? ?5)由于視覺(jué)光源的幾何特性,而造成的圖像邊緣位置的不確定性。
? ? ?而遠(yuǎn)心鏡頭就可以有效解決普通鏡頭存在的上述問(wèn)題,而且沒(méi)有此性質(zhì)的判斷誤差,因此可用在高精度測(cè)量、度量計(jì)量等方面。遠(yuǎn)心鏡頭是一種高端的工業(yè)鏡頭,通常有比較出眾的像質(zhì),特別適合于尺寸測(cè)量的應(yīng)用。
? ? ?無(wú)論何處,在特定的工作距離,重新調(diào)焦后會(huì)有相同的放大倍率,因?yàn)檫h(yuǎn)心鏡頭的最大視場(chǎng)范圍直接與鏡頭的光欄接近程度有關(guān),鏡頭尺寸越大,需要的現(xiàn)場(chǎng)就越大。遠(yuǎn)心測(cè)量鏡頭能提供優(yōu)越的影像質(zhì)素,畸變比傳統(tǒng)定焦鏡頭小,這種光學(xué)設(shè)計(jì)令影像面更對(duì)稱(chēng),可配合軟件進(jìn)行精密測(cè)量。
? ?普通鏡頭優(yōu)點(diǎn):成本低,實(shí)用,用途廣。
? ?普通鏡頭缺點(diǎn):放大倍率會(huì)有變化,有視差。
? ?普通鏡頭應(yīng)用:大物體成像。
? ?遠(yuǎn)心鏡頭的優(yōu)點(diǎn):放大倍數(shù)恒定,不隨景深變化而變化,無(wú)視差。
? ?遠(yuǎn)心鏡頭的缺點(diǎn):成本高,尺寸大,重量重。
? ?遠(yuǎn)心鏡頭的應(yīng)用:度量衡方面,基于CCD方面的測(cè)量,微晶學(xué)
工業(yè)鏡頭的選擇要點(diǎn):
對(duì)鏡頭的選擇,我們首先必須先確定客戶(hù)需求:
1、視野范圍、光學(xué)放大倍數(shù)及期望的工作距離:在選擇鏡頭時(shí),我們會(huì)選擇比被測(cè)物體視野稍大一點(diǎn)的鏡頭,以有利于運(yùn)動(dòng)控制。
2、景深要求:對(duì)于對(duì)景深有要求的項(xiàng)目,盡可能使用小的光圈;在選擇放大倍率的鏡頭時(shí),在項(xiàng)目許可下盡可能選用低倍率鏡頭。如果項(xiàng)目要求比較苛刻時(shí),傾向選擇高景深的尖端鏡頭。
3、芯片大小和相機(jī)接口:例如2/3’’鏡頭支持最大的工業(yè)相機(jī)耙面為2/3’’,它是不能支持1英寸以上的工業(yè)相機(jī)。
4、注意與光源的配合,選配合適的鏡頭 。
5、可安裝空間:在方案可選擇情況下,讓客戶(hù)更改設(shè)備尺寸是不現(xiàn)實(shí)的。
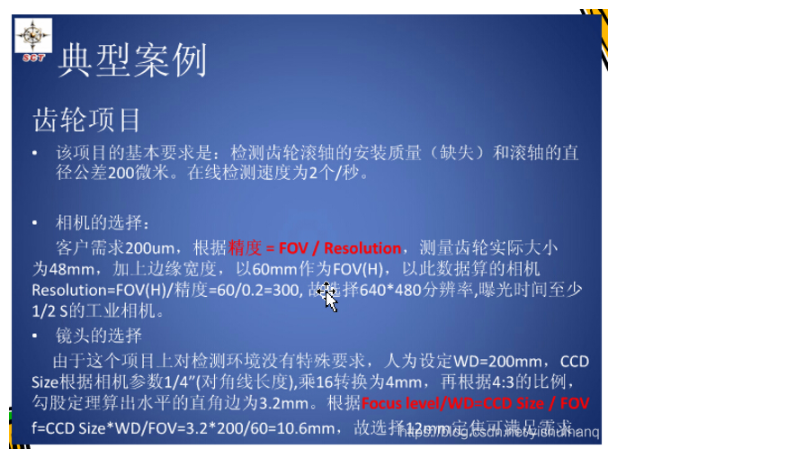
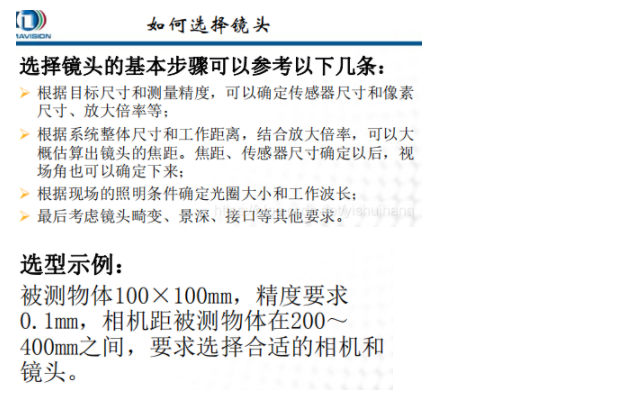
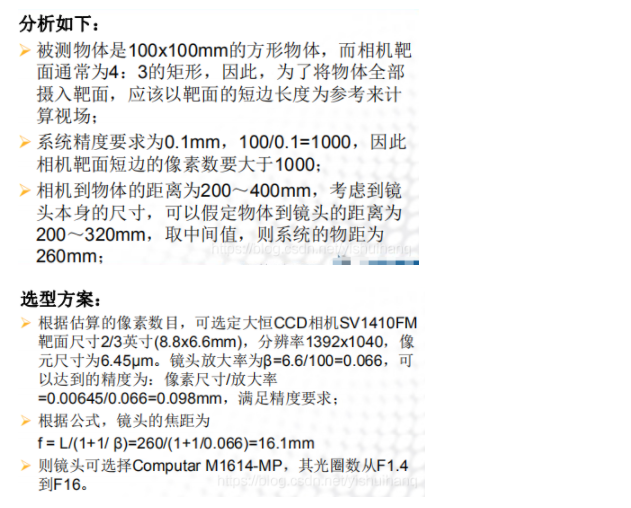
典型的選型案例:
案例一:

案例二:
常用的工業(yè)鏡頭品牌:

快門(mén)速度計(jì)算:
假設(shè)速度是 0.5m/s, sensor 為 640*480 的分辨率,視場(chǎng)為4.2*3mm,
則有:4.2mm/640=0.00656mm ,3mm/480=0.00625mm,取最小的像素當(dāng)量,此時(shí)的當(dāng)量為一個(gè)像素=0.000625mm。
當(dāng)物體在快門(mén)時(shí)間內(nèi)的運(yùn)動(dòng)大于 1.5 個(gè)像素時(shí)可以認(rèn)為會(huì)出現(xiàn)拖影,因此要不出現(xiàn)拖影則:
t(快門(mén))小于或者等于 0.00625mm*1.5/0.5m/s=0.00001875s。
t=像素當(dāng)量 x1.5(指定的常數(shù))/運(yùn)動(dòng)速度。
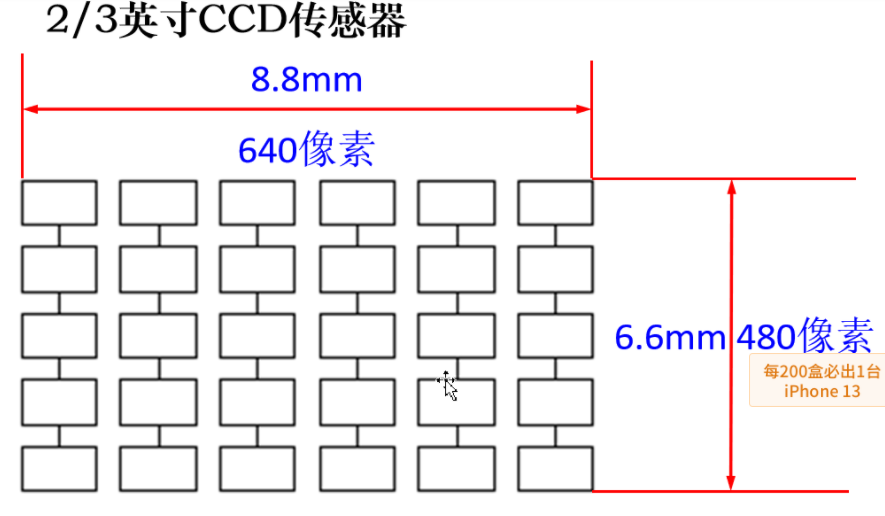
像元尺寸=CCD 長(zhǎng)/水平方向分辨率(或者 CCD 寬/垂直方向分辨率)。
一般長(zhǎng)的方向?qū)χ曇伴L(zhǎng)的方向,寬的方向?qū)σ曇岸痰姆较颉?/p>
4. 圖像采集卡
圖像采集卡只是完整的機(jī)器視覺(jué)系統(tǒng)的一個(gè)部件,但是它扮演一個(gè)非常重要的角色。圖像采集卡直接決定了攝像頭的接口:黑白、彩色、模擬、數(shù)字等等。
比較典型的是PCI或AGP兼容的捕獲卡,可以將圖像迅速地傳送到計(jì)算機(jī)存儲(chǔ)器進(jìn)行處理。有些采集卡有內(nèi)置的多路開(kāi)關(guān)。例如,可以連接8個(gè)不同的攝像機(jī),然后告訴采集卡采用那一個(gè)相機(jī)抓拍到的信息。有些采集卡有內(nèi)置的數(shù)字輸入以觸發(fā)采集卡進(jìn)行捕捉,當(dāng)采集卡抓拍圖像時(shí)數(shù)字輸出口就觸發(fā)閘門(mén)。
圖像采集卡的主要功能:
A/D轉(zhuǎn)換
圖像傳輸
圖像采集控制
圖像處理(FPGA、DSP)
模擬量圖像采集卡:
標(biāo)準(zhǔn)視頻信號(hào)采集:? PAL、NTSC
非標(biāo)準(zhǔn)視頻信號(hào)采集
數(shù)字量圖像采集卡:
IEEE1394卡
RS-644 LVDS
Channel Link LVDS
Camera Link LVDS
千兆網(wǎng)圖像傳輸卡/傳輸器
5.視覺(jué)處理器
視覺(jué)處理器集采集卡與處理器于一體。以往計(jì)算機(jī)速度較慢時(shí),采用視覺(jué)處理器加快視覺(jué)處理任務(wù)。現(xiàn)在由于采集卡可以快速傳輸圖像到存儲(chǔ)器,而且計(jì)算機(jī)也快多了,所以現(xiàn)在視覺(jué)處理器用的較少了。
二、算法(預(yù)處理算法、檢測(cè)算法)
常用的圖像處理算法:
1、圖像變換:(空域與頻域、幾何變換、色度變換、尺度變換)
幾何變換:圖像平移、旋轉(zhuǎn)、鏡像、轉(zhuǎn)置;
尺度變換:圖像縮放、插值算法(最近鄰插值、雙線(xiàn)性插值、雙三次插值);
空域與頻域間變換:由于圖像陣列很大,直接在空間域中進(jìn)行處理,涉及計(jì)算量很大。因此,有時(shí)候需要將空間域變換到頻域進(jìn)行處理。例如:傅立葉變換、沃爾什變換、離散余弦變換等間接處理技術(shù),將空間域的處理轉(zhuǎn)換為頻域處理,不僅可減少計(jì)算量,而且可獲得更有效的處理(如傅立葉變換可在頻域中進(jìn)行數(shù)字濾波處理)。
2、圖像增強(qiáng):
圖像增強(qiáng)不考慮圖像降質(zhì)的原因,突出圖像中所感興趣的部分。如強(qiáng)化圖像高頻分量,可使圖像中物體輪廓清晰,細(xì)節(jié)明顯;如強(qiáng)化低頻分量可減少圖像中噪聲影響。
灰度變換增強(qiáng)(線(xiàn)性灰度變換、分段線(xiàn)性灰度變換、非線(xiàn)性灰度變換);
直方圖增強(qiáng)(灰度直方圖、直方圖均衡化);
圖像平滑/降噪(鄰域平均法、加權(quán)平均法、中值濾波、非線(xiàn)性均值濾波、高斯濾波、雙邊濾波);
圖像(邊緣)銳化:梯度銳化,Roberts算子、Laplace算子、Sobel算子等;
3、紋理分析(取骨架、連通性);
4、圖像分割:
圖像分割是將圖像中有意義的特征部分提取出來(lái),其有意義的特征有圖像中的邊緣、區(qū)域等,這是進(jìn)一步進(jìn)行圖像識(shí)別、分析和理解的基礎(chǔ)。
(1)閾值分割(固定閾值分割、最優(yōu)/OTSU閾值分割、自適應(yīng)閾值分割);
(2)基于邊界分割(Canny邊緣檢測(cè)、輪廓提取、邊界跟蹤);
(3)Hough變換(Hough變換直線(xiàn)檢測(cè)、Hough變換圓檢測(cè));
(4)基于區(qū)域分割(區(qū)域生長(zhǎng)、區(qū)域歸并與分裂、聚類(lèi)分割);
(5)色彩分割;
(6)分水嶺分割;
5、圖像特征:
(1)幾何特征(位置與方向、周長(zhǎng)、面積、長(zhǎng)軸與短軸、距離(歐式距離、街區(qū)距離、棋盤(pán)距離));
(2)形狀特征(幾何形態(tài)分析(Blob分析):矩形度、圓形度、不變矩、偏心率、多邊形描述、曲線(xiàn)描述);
(3)幅值特征(矩、投影);
(4)直方圖特征(統(tǒng)計(jì)特征):均值、方差、能量、熵、L1范數(shù)、L2范數(shù)等;直方圖特征方法計(jì)算簡(jiǎn)單、具有平移和旋轉(zhuǎn)不變性、對(duì)顏色像素的精確空間分布不敏感等,在表面檢測(cè)、缺陷識(shí)別有不少應(yīng)用。
(5)顏色特征(顏色直方圖、顏色矩)
(6)局部二值模式( LBP)特征:LBP對(duì)諸如光照變化等造成的圖像灰度變化具有較強(qiáng)的魯棒性,在表面缺陷檢測(cè)、指紋識(shí)別、光學(xué)字符識(shí)別、人臉識(shí)別及車(chē)牌識(shí)別等領(lǐng)域有所應(yīng)用。由于LBP 計(jì)算簡(jiǎn)單,也可以用于實(shí)時(shí)檢測(cè)。
6、圖像/模板匹配:
輪廓匹配、歸一化積相關(guān)灰度匹配、不變矩匹配、最小均方誤差匹配
7、色彩分析
色度、色密度、光譜、顏色直方圖、自動(dòng)白平衡
8、圖像數(shù)據(jù)編碼壓縮和傳輸
圖像編碼壓縮技術(shù)可減少描述圖像的數(shù)據(jù)量(即比特?cái)?shù)),以便節(jié)省圖像傳輸、處理時(shí)間和減少所占用的存儲(chǔ)器容量。壓縮可以在不失真的前提下獲得,也可以在允許的失真條件下進(jìn)行。編碼是壓縮技術(shù)中最重要的方法,它在圖像處理技術(shù)中是發(fā)展最早且比較成熟的技術(shù)。
9、表面缺陷目標(biāo)識(shí)別算法:
傳統(tǒng)方法:貝葉斯分類(lèi)、K最近鄰(KNN)、人工神經(jīng)網(wǎng)絡(luò)(ANN)、支持向量機(jī)(SVM)、K-means等;
10、圖像分類(lèi)(識(shí)別)
圖像分類(lèi)(識(shí)別)屬于模式識(shí)別的范疇,其主要內(nèi)容是圖像經(jīng)過(guò)某些預(yù)處理(增強(qiáng)、復(fù)原、壓縮)后,進(jìn)行圖像分割和特征提取,從而進(jìn)行判決分類(lèi)。
11、圖像復(fù)原
圖像復(fù)原要求對(duì)圖像降質(zhì)的原因有一定的了解,一般講應(yīng)根據(jù)降質(zhì)過(guò)程建立“降質(zhì)模型”,再采用某種濾波方法,恢復(fù)或重建原來(lái)的圖像。
三、現(xiàn)有可用的視覺(jué)檢測(cè)軟件/庫(kù)
1、做工業(yè)視覺(jué)檢測(cè)的公司有哪些?
比較出名的有:大恒圖像(亞洲Halcon最大代理商)、凌云光技術(shù)(VisionPro視覺(jué)平臺(tái):印刷、3C電子、顯示屏、玻璃、線(xiàn)路板檢測(cè))、大族激光(振靜系統(tǒng):視覺(jué)激光焊接,定視覺(jué)位、缺陷檢測(cè))、康耐視、基恩士、深圳精銳視覺(jué)、深圳市視覺(jué)龍科技有限公司、廣州超音速、深圳市創(chuàng)科自動(dòng)化等等。
可二次開(kāi)發(fā)的視覺(jué)系統(tǒng):Labview、DVT、Halcon、OpenCV等。
2、常用的視覺(jué)檢測(cè)軟件/庫(kù)
視覺(jué)開(kāi)發(fā)軟件工具 Halcon、VisionPro、LabView、OpenCV, 還有eVision、Mil、Sapera等。
(一)、Halcon:底層功能算法多,運(yùn)算性能快,功能齊全,容易上手,開(kāi)發(fā)項(xiàng)目周期短。非開(kāi)源項(xiàng)目,商用收費(fèi),價(jià)格較貴。
? ? ? ? ?Halcon:Halcon是德國(guó)MVtec公司開(kāi)發(fā)的一套完善的標(biāo)準(zhǔn)的機(jī)器視覺(jué)算法包,擁有應(yīng)用廣泛的機(jī)器視覺(jué)集成開(kāi)發(fā)環(huán)境。它是一套image processing library,由一千多個(gè)各自獨(dú)立的函數(shù),以及底層的數(shù)據(jù)管理核心構(gòu)成。其中包含了各類(lèi)濾波,色彩以及幾何,數(shù)學(xué)轉(zhuǎn)換,型態(tài)學(xué)計(jì)算分析,校正,分類(lèi)辨識(shí),形狀搜尋等等基本的幾何以及影像計(jì)算功能。整個(gè)函數(shù)庫(kù)可以用C,C++,C#,Visual basic和Delphi等多種普通編程語(yǔ)言訪(fǎng)問(wèn)。Halcon為大量的圖像獲取設(shè)備提供接口,保證了硬件的獨(dú)立性。
(二)OpenCV:功能算法相對(duì)較多(比Halcon少),開(kāi)源,可用于商用,開(kāi)發(fā)周期較長(zhǎng)(比Halcon長(zhǎng)),有些算法要自己寫(xiě)。
? ? ? ? OpenCV是一個(gè)基于(開(kāi)源)發(fā)行的跨平臺(tái)計(jì)算機(jī)視覺(jué)庫(kù),可以運(yùn)行在Linux、Windows和Mac OS操作系統(tǒng)上。其核心輕量級(jí)而且高效——由一系列 C 函數(shù)和少量 C++ 類(lèi)構(gòu)成,實(shí)現(xiàn)了圖像處理和計(jì)算機(jī)視覺(jué)方面的很多通用算法。OpenCV用C++語(yǔ)言編寫(xiě),它的主要接口也是C++語(yǔ)言。該庫(kù)也有大量的Python, Java and MATLAB/OCTAVE的接口,如今也提供對(duì)于C#, Ruby的支持。OpenCV可以在 Windows, Android, Maemo, FreeBSD, OpenBSD, iOS,Linux 和Mac OS等平臺(tái)上運(yùn)行。
OpenCV出身:OpenCV是Intel開(kāi)源計(jì)算機(jī)視覺(jué)庫(kù)。其核心由一系列 C 函數(shù)和少量 C++ 類(lèi)構(gòu)成,實(shí)現(xiàn)了圖像處理和計(jì)算機(jī)視覺(jué)方面的很多通用算法。OpenCV 的特點(diǎn)擁有包括300多個(gè)C函數(shù)的跨平臺(tái)的中、高層 API 跨平臺(tái):Windows, Linux;免費(fèi)(FREE):無(wú)論對(duì)非商業(yè)應(yīng)用和商業(yè)應(yīng)用;速度快;使用方便。
OpenCV具有以下的特征:(1)開(kāi)源計(jì)算機(jī)視覺(jué)采用C/C++編寫(xiě)。(2)使用目的是開(kāi)發(fā)實(shí)時(shí)應(yīng)用程序。(3)獨(dú)立與操作系統(tǒng)、硬件和圖形管理器。(4)具有通用的圖象/視頻載入、保存和獲取模塊。(5)具有底層和高層的應(yīng)用開(kāi)發(fā)包。
應(yīng)用OpenCV能夠?qū)崿F(xiàn)以下功能:(1)對(duì)圖象數(shù)據(jù)的操作,包括分配、釋放、復(fù)制和轉(zhuǎn)換數(shù)據(jù)。(2)對(duì)圖象和視頻的輸入輸出,指文件和攝像頭作為輸入,圖象和視頻文件作為輸出。(3)具有對(duì)距陳和向量的操作以及線(xiàn)性代數(shù)的算法程序,包括距陣、解方程、特征值以及奇異值。(4)可對(duì)各種動(dòng)態(tài)數(shù)據(jù)結(jié)構(gòu),如列表、隊(duì)列、集合、樹(shù)和圖等進(jìn)行操作。(5)具有基本的數(shù)字圖象處理能力,如可進(jìn)行濾波、邊緣檢測(cè)、角點(diǎn)檢測(cè)、采樣與差值、色彩轉(zhuǎn)換、形態(tài)操作、直方圖和圖象金字塔等操作。
(6)可對(duì)各種結(jié)構(gòu)進(jìn)行分析,包括連接部件分析、輪廓處理、距離變換、各種距的計(jì)算、模板匹配、Hongh變換、多邊形逼近、直線(xiàn)擬合、橢圓擬合和Delaunay三角劃分等。(7)對(duì)攝像頭的定標(biāo),包括發(fā)現(xiàn)與跟蹤定標(biāo)模式、定標(biāo)、基本矩陣估計(jì)、齊次矩陣估計(jì)和立體對(duì)應(yīng)。(8)對(duì)運(yùn)動(dòng)的分析,如對(duì)光流、運(yùn)動(dòng)分割和跟蹤的分析。(9)對(duì)目標(biāo)的識(shí)別,可采用特征法和隱馬爾科夫模型(HMM)法。(10)具有基本的GUI功能,包括圖像與視頻顯示、鍵盤(pán)和鼠標(biāo)事件處理及滾動(dòng)條等。(11)可對(duì)圖像進(jìn)行標(biāo)注,如對(duì)線(xiàn)、二次曲線(xiàn)和多邊形進(jìn)行標(biāo)注,還可以書(shū)寫(xiě)文字(目前之支持中文)。
(三)VisionPro
? ? ? ? ?VisionPro是美國(guó)康耐視Cognex公司提供全套視覺(jué)解決方案。VisionPro提供多種開(kāi)發(fā)工具拖放式界面、簡(jiǎn)單指令碼和編程方式等,全面支持所有模式的開(kāi)發(fā)。用戶(hù)利用VisionPro QuickBuild?可以無(wú)需編程配置讀取、選擇并優(yōu)化視覺(jué)工具,決定產(chǎn)品是否合格。用戶(hù)也可以利用C++、C#、VB及.NET開(kāi)發(fā)管理應(yīng)用程序。Vision Pro提供的.NET程序接口允許用戶(hù)采用面向?qū)ο蟮母呒?jí)語(yǔ)言編程訪(fǎng)問(wèn)所有工具,以高效開(kāi)發(fā)客戶(hù)的專(zhuān)用視覺(jué)方案。
(四)LabView
? ? ? ? ?LabView是一種程序開(kāi)發(fā)環(huán)境,由美國(guó)國(guó) 家儀器(NI)公司研制開(kāi)發(fā),使用的是圖形化編輯語(yǔ)言G編寫(xiě)程序,產(chǎn)生的程序是框圖的形式。LabView軟件是NI設(shè)計(jì)平臺(tái)的核心,也是開(kāi)發(fā)測(cè)量或控制系統(tǒng)的理想選擇。LabView開(kāi)發(fā)環(huán)境集成了工程師和科學(xué)家快速構(gòu)建各種應(yīng)用所需的所有工具,旨在幫助工程師和科學(xué)家解決問(wèn)題、提高生產(chǎn)力和不斷創(chuàng)新。
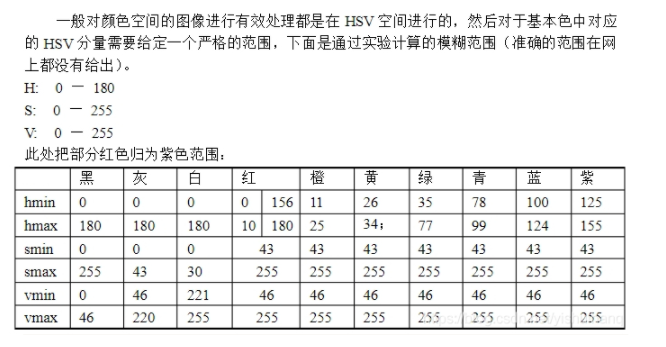
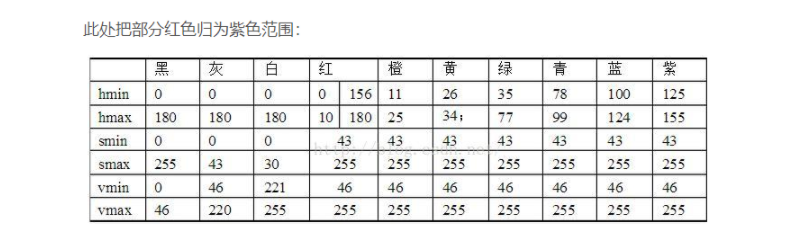
HSV顏色識(shí)別-HSV基本顏色分量范圍
一般對(duì)顏色空間的圖像進(jìn)行有效處理都是在HSV空間進(jìn)行的,然后對(duì)于基本色中對(duì)應(yīng)的HSV分量需要給定一個(gè)嚴(yán)格的范圍,下面是通過(guò)實(shí)驗(yàn)計(jì)算的模糊范圍(準(zhǔn)確的范圍在網(wǎng)上都沒(méi)有給出)。
H:? 0 — 180
S:? 0 — 255
V:? 0 — 255
HSV(色相/飽和度/明度)顏色空間是表示類(lèi)似于RGB顏色模型的顏色空間的模型。根據(jù)色相通道(Channel)對(duì)顏色類(lèi)型進(jìn)行建模,因此在需要根據(jù)顏色對(duì)對(duì)象進(jìn)行分割的圖像處理任務(wù)中非常有用。飽和度的變化代表顏色成分的多少。明度通道描述顏色的亮度。
原文鏈接
https://blog.csdn.net/yishuihanq/article/details/107193297
機(jī)器學(xué)習(xí)算法AI大數(shù)據(jù)技術(shù)
?搜索公眾號(hào)添加:?datanlp
長(zhǎng)按圖片,識(shí)別二維碼
閱讀過(guò)本文的人還看了以下文章:
TensorFlow 2.0深度學(xué)習(xí)案例實(shí)戰(zhàn)
基于40萬(wàn)表格數(shù)據(jù)集TableBank,用MaskRCNN做表格檢測(cè)
《基于深度學(xué)習(xí)的自然語(yǔ)言處理》中/英PDF
Deep Learning 中文版初版-周志華團(tuán)隊(duì)
【全套視頻課】最全的目標(biāo)檢測(cè)算法系列講解,通俗易懂!
《美團(tuán)機(jī)器學(xué)習(xí)實(shí)踐》_美團(tuán)算法團(tuán)隊(duì).pdf
《深度學(xué)習(xí)入門(mén):基于Python的理論與實(shí)現(xiàn)》高清中文PDF+源碼
《深度學(xué)習(xí):基于Keras的Python實(shí)踐》PDF和代碼
python就業(yè)班學(xué)習(xí)視頻,從入門(mén)到實(shí)戰(zhàn)項(xiàng)目
2019最新《PyTorch自然語(yǔ)言處理》英、中文版PDF+源碼
《21個(gè)項(xiàng)目玩轉(zhuǎn)深度學(xué)習(xí):基于TensorFlow的實(shí)踐詳解》完整版PDF+附書(shū)代碼
《深度學(xué)習(xí)之pytorch》pdf+附書(shū)源碼
PyTorch深度學(xué)習(xí)快速實(shí)戰(zhàn)入門(mén)《pytorch-handbook》
【下載】豆瓣評(píng)分8.1,《機(jī)器學(xué)習(xí)實(shí)戰(zhàn):基于Scikit-Learn和TensorFlow》
《Python數(shù)據(jù)分析與挖掘?qū)崙?zhàn)》PDF+完整源碼
汽車(chē)行業(yè)完整知識(shí)圖譜項(xiàng)目實(shí)戰(zhàn)視頻(全23課)
李沐大神開(kāi)源《動(dòng)手學(xué)深度學(xué)習(xí)》,加州伯克利深度學(xué)習(xí)(2019春)教材
筆記、代碼清晰易懂!李航《統(tǒng)計(jì)學(xué)習(xí)方法》最新資源全套!
《神經(jīng)網(wǎng)絡(luò)與深度學(xué)習(xí)》最新2018版中英PDF+源碼
將機(jī)器學(xué)習(xí)模型部署為REST API
FashionAI服裝屬性標(biāo)簽圖像識(shí)別Top1-5方案分享
重要開(kāi)源!CNN-RNN-CTC 實(shí)現(xiàn)手寫(xiě)漢字識(shí)別
同樣是機(jī)器學(xué)習(xí)算法工程師,你的面試為什么過(guò)不了?
前海征信大數(shù)據(jù)算法:風(fēng)險(xiǎn)概率預(yù)測(cè)
【Keras】完整實(shí)現(xiàn)‘交通標(biāo)志’分類(lèi)、‘票據(jù)’分類(lèi)兩個(gè)項(xiàng)目,讓你掌握深度學(xué)習(xí)圖像分類(lèi)
VGG16遷移學(xué)習(xí),實(shí)現(xiàn)醫(yī)學(xué)圖像識(shí)別分類(lèi)工程項(xiàng)目
特征工程(二) :文本數(shù)據(jù)的展開(kāi)、過(guò)濾和分塊
如何利用全新的決策樹(shù)集成級(jí)聯(lián)結(jié)構(gòu)gcForest做特征工程并打分?
Machine Learning Yearning 中文翻譯稿
全球AI挑戰(zhàn)-場(chǎng)景分類(lèi)的比賽源碼(多模型融合)
斯坦福CS230官方指南:CNN、RNN及使用技巧速查(打印收藏)
python+flask搭建CNN在線(xiàn)識(shí)別手寫(xiě)中文網(wǎng)站
中科院Kaggle全球文本匹配競(jìng)賽華人第1名團(tuán)隊(duì)-深度學(xué)習(xí)與特征工程
不斷更新資源
深度學(xué)習(xí)、機(jī)器學(xué)習(xí)、數(shù)據(jù)分析、python
?搜索公眾號(hào)添加:?datayx??