
機(jī)器視覺系統(tǒng)的基礎(chǔ):相機(jī)、鏡頭、光源
擊上方“機(jī)器視覺”,選擇“置頂/星標(biāo)公眾號”

一、機(jī)器視覺原理及終極目標(biāo)
?
機(jī)器視覺的終極目標(biāo)是什么?將“人眼”作為機(jī)器視覺的目標(biāo)追求,是機(jī)器視覺行業(yè)的第一性原理嗎?那么細(xì)分下去,人眼的特點又是什么?機(jī)器視覺該如何向人眼學(xué)習(xí)?機(jī)器視覺未來發(fā)展的方向和實施步驟是什么?
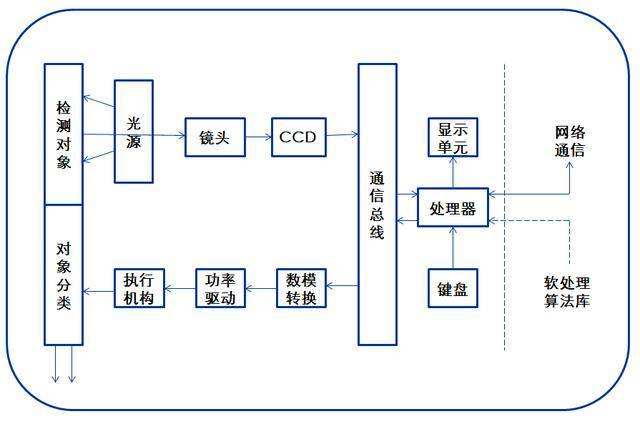
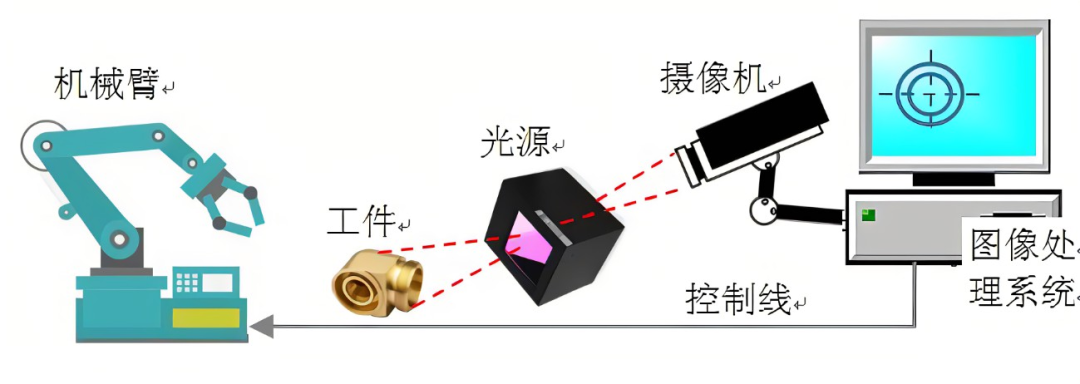
機(jī)器視覺就是用機(jī)器代替人眼來做測量和判斷。機(jī)器視覺系統(tǒng)是指通過機(jī)器視覺產(chǎn)品(即圖像攝取裝置,分 CMOS 和CCD 兩種)將被攝取目標(biāo)轉(zhuǎn)換成圖像信號,傳送給專用的圖像處理系統(tǒng),根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字化信號;圖像系統(tǒng)對這些信號進(jìn)行各種運算來抽取目標(biāo)的特征,進(jìn)而根據(jù)判別的結(jié)果來控制現(xiàn)場的設(shè)備動作。?
一套完整的視覺檢測系統(tǒng)主要包含圖像采集部分和圖像分析部分,而圖像采集部分主要由工業(yè)相機(jī)、工業(yè)鏡頭以及機(jī)器視覺光源承擔(dān)。
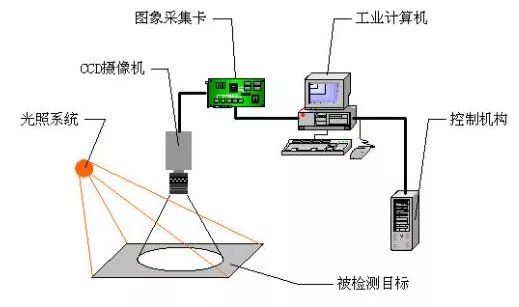
二、機(jī)器視覺系統(tǒng)構(gòu)成
?視覺系統(tǒng)主要由以下部分組成?
1.照明光源?
2.鏡頭?
3.工業(yè)攝像機(jī)?
4.圖像采集/處理卡?
5.圖像處理系統(tǒng)?
6.其它外部設(shè)備?
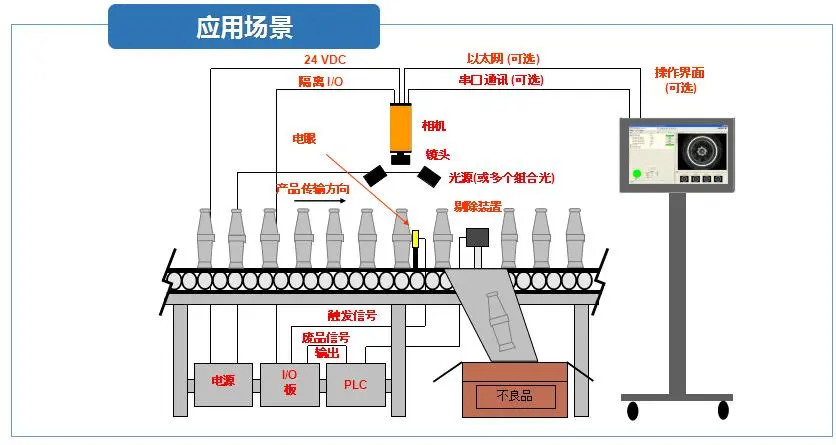
機(jī)器視覺的功能包括:物體定位、特征檢測、缺陷判斷、目標(biāo)識別、計數(shù)和運動跟蹤。正是由于機(jī)器視覺系統(tǒng)可以快速獲取大量信息,而且易于自動處理,也易于同設(shè)計信息以及加工控制信息集成,因此,在現(xiàn)代自動化生產(chǎn)過程中,人們將機(jī)器視覺系統(tǒng)廣泛地用于工況監(jiān)測、成品檢驗和質(zhì)量控制等領(lǐng)域。
機(jī)器視覺表面檢測比較復(fù)雜,視覺感知在人工智能技術(shù)中扮演舉足輕重的角色。機(jī)器視覺系統(tǒng)的目標(biāo)是提高生產(chǎn)的柔性和自動化程度。
三、工業(yè)相機(jī)篇
1
?工業(yè)相機(jī)又俗稱攝像機(jī),相比于傳統(tǒng)的民用相機(jī)(攝像機(jī))而言,它具有高的圖像穩(wěn)定性、高傳輸能力和高抗干擾能力等,目前市面上的工業(yè)相機(jī)大多是基于CCD(Charge?
Coupled Device)或CMOS(Complementary Metal Oxide Semiconductor)芯片的相機(jī)。
CCD是目前機(jī)器視覺最為常用的圖像傳感器。它集光電轉(zhuǎn)換及電荷存貯、電荷轉(zhuǎn)移、信號讀取于一體,是典型的固體成像器件。CCD的突出特點是以電荷作為信號,而不同于其它器件是以電流或者電壓為信號。這類成像器件通過光電轉(zhuǎn)換形成電荷包,而后在驅(qū)動脈沖的作用下轉(zhuǎn)移、放大輸出圖像信號。典型的CCD相機(jī)由光學(xué)鏡頭、時序及同步信號發(fā)生器、垂直驅(qū)動器、模擬/數(shù)字信號處理電路組成。CCD作為一種功能器件,與真空管相比,具有無灼傷、無滯后、低電壓工作、低功耗等優(yōu)點。
CMOS圖像傳感器的開發(fā)最早出現(xiàn)在20世紀(jì)70 年代初,90 年代初期,隨著超大規(guī)模集成電路 (VLSI) 制造工藝技術(shù)的發(fā)展,CMOS圖像傳感器得到迅速發(fā)展。CMOS圖像傳感器將光敏元陣列、圖像信號放大器、信號讀取電路、模數(shù)轉(zhuǎn)換電路、圖像信號處理器及控制器集成在一塊芯片上,還具有局部像素的編程隨機(jī)訪問的優(yōu)點。目前,CMOS圖像傳感器以其良好的集成性、低功耗、高速傳輸和寬動態(tài)范圍等特點在高分辨率和高速場合得到了廣泛的應(yīng)用。
2
任何東西分類一定有它自己的分類標(biāo)準(zhǔn),工業(yè)相機(jī)也不例外,按照芯片類型可以分為CCD相機(jī)、CMOS相機(jī);按照傳感器的結(jié)構(gòu)特性可以分為線陣相機(jī)、面陣相機(jī);按照掃描方式可以分為隔行掃描相機(jī)、逐行掃描相機(jī);按照分辨率大小可以分為普通分辨率相機(jī)、高分辨率相機(jī);按照輸出信號方式可以分為模擬相機(jī)、數(shù)字相機(jī);按照輸出色彩可以分為單色(黑白)相機(jī)、彩色相機(jī);按照輸出信號速度可以分為普通速度相機(jī)、高速相機(jī);按照響應(yīng)頻率范圍可以分為可見光(普通)相機(jī)、紅外相機(jī)、紫外相機(jī)等。
3
1、工業(yè)相機(jī)的性能穩(wěn)定可靠易于安裝,相機(jī)結(jié)構(gòu)緊湊結(jié)實不易損壞,連續(xù)工作時間長,可在較差的環(huán)境下使用,一般的數(shù)碼相機(jī)是做不到這些的。例如:讓民用數(shù)碼相機(jī)一天工作24小時或連續(xù)工作幾天肯定會受不了的。
2、工業(yè)相機(jī)的快門時間非常短,可以抓拍高速運動的物體。
例如,把名片貼在電風(fēng)扇扇葉上,以最大速度旋轉(zhuǎn),設(shè)置合適的快門時間,用工業(yè)相機(jī)抓拍一張圖像,仍能夠清晰辨別名片上的字體。用普通的相機(jī)來抓拍,是不可能達(dá)到同樣效果的。
3、工業(yè)相機(jī)的圖像傳感器是逐行掃描的,而普通的相機(jī)的圖像傳感器是隔行掃描的, 逐行掃描的圖像傳感器生產(chǎn)工藝比較復(fù)雜,成品率低,出貨量少,世界上只有少數(shù)公司能夠提供這類產(chǎn)品,例如Dalsa、Sony,而且價格昂貴。
4、工業(yè)相機(jī)的幀率遠(yuǎn)遠(yuǎn)高于普通相機(jī)。
工業(yè)相機(jī)每秒可以拍攝十幅到幾百幅圖片,而普通相機(jī)只能拍攝2-3幅圖像,相差較大。
5、工業(yè)相機(jī)輸出的是裸數(shù)據(jù)(raw data),其光譜范圍也往往比較寬,比較適合進(jìn)行高質(zhì)量的圖像處理算法,例如機(jī)器視覺(Machine Vision)應(yīng)用。而普通相機(jī)拍攝的圖片,其光譜范圍只適合人眼視覺,并且經(jīng)過了mjpeg壓縮,圖像質(zhì)量較差,不利于分析處理。
6、工業(yè)相機(jī)(Industrial Camera)相對普通相機(jī)(DSC)來說價格較貴。
4
1、根據(jù)應(yīng)用的不同分別選用CCD或CMOS相機(jī)
CCD工業(yè)相機(jī)主要應(yīng)用在運動物體的圖像提取,如貼片機(jī)機(jī)器視覺,當(dāng)然隨著CMOS技術(shù)的發(fā)展,許多貼片機(jī)也在選用CMOS工業(yè)相機(jī)。用在視覺自動檢查的方案或行業(yè)中一般用CCD工業(yè)相機(jī)比較多。CMOS工業(yè)相機(jī)由成本低,功耗低也應(yīng)用越來越廣泛。
2、分辨率的選擇
首先考慮待觀察或待測量物體的精度,根據(jù)精度選擇分辨率。相機(jī)像素精度=單方向視野范圍大小/相機(jī)單方向分辨率。則相機(jī)單方向分辨率=單方向視野范圍大小/理論精度。
若單視野為5mm長,理論精度為0.02mm,則單方向分辨率=5/0.02=250。然而為增加系統(tǒng)穩(wěn)定性,不會只用一個像素單位對應(yīng)一個測量/觀察精度值,一般可以選擇倍數(shù)4或更高。這樣該相機(jī)需求單方向分辨率為1000,選用130萬像素已經(jīng)足夠。
其次看工業(yè)相機(jī)的輸出,若是體式觀察或機(jī)器軟件分析識別 ,分辨率高是有幫助的;若是VGA輸出或USB輸出,在顯示器上觀察,則還依賴于顯示器的分辨率,工業(yè)相機(jī)的分辨率再高,顯示器分辨率不夠,也是沒有意義的;利用存儲卡或拍照功能,工業(yè)相機(jī)的分辨率高也是有幫助的。
3、工業(yè)相機(jī)與鏡頭的匹配
傳感器芯片尺寸需要小于或等于鏡頭尺寸,C或CS安裝座也要匹配(或者增加轉(zhuǎn)接口);
4、工業(yè)相機(jī)幀數(shù)選擇
當(dāng)被測物體有運動要求時,要選擇幀數(shù)高的工業(yè)相機(jī)。但一般來說分辨率越高,幀數(shù)越低。
5、線陣工業(yè)相機(jī)的選型

第一步:計算分辯率。被檢物體寬度(與運動方向垂直)除以最小檢測精度得出每行所需要的像素值。
第二步:計算實際精度。根據(jù)上面像素值選擇相機(jī)。然后用被檢物體寬度除以像素數(shù)得出實際檢測精度。
第三步:計算每秒掃描行數(shù),也就是線掃描速率。每秒運動速度長度除以精度得出每秒的掃描行數(shù)。
根據(jù)以上數(shù)值就可以選定相機(jī)。
例如被檢物體寬度為160mm、精度0.1mm、運動速度2200mm/s相機(jī)分辨率:160/0.1=1600像素應(yīng)為2000像素左右,先選定為2K 相機(jī)
實際精度為:160mm/2048像素=0.08mm
線掃描速率:2200mm/0.08mm=27.5KHz
所以應(yīng)選定相機(jī)為線掃描速率大約為28kHz 的2K 相機(jī)。
四、鏡頭篇
機(jī)器視覺系統(tǒng)非常復(fù)雜。即使在簡單的系統(tǒng)中,硬件和軟件也可以協(xié)同工作以產(chǎn)生結(jié)果。盡管有許多重要組成部分,但其中一個突出:鏡頭。該鏡頭至關(guān)重要,因為它可以捕獲最終將由軟件重新創(chuàng)建的數(shù)據(jù)。它可以定位圖像特征,保持焦點并最大化對比度。但是,它在各種規(guī)格下運行,要實現(xiàn)機(jī)器視覺系統(tǒng)的優(yōu)化呈現(xiàn),必須使用能產(chǎn)生佳性能的鏡頭。鏡頭的基本功能就是實現(xiàn)光束變換(調(diào)制),在機(jī)器視覺系統(tǒng)中,鏡頭的主要作用是將成像目標(biāo)在圖像傳感器的光敏面上。鏡頭的質(zhì)量直影響到機(jī)器視覺系統(tǒng)的整體性能,合理地選擇和安裝鏡頭,是機(jī)器視覺系統(tǒng)設(shè)計的重要環(huán)節(jié)。
基礎(chǔ)知識
1
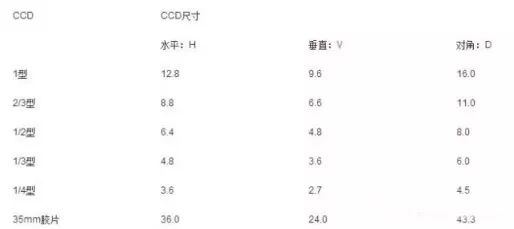
大家如何選擇合適鏡頭,鏡頭選配時需要選擇與攝像機(jī)接口和CCD的尺寸相匹配的鏡頭。鏡頭C和CS的接口方式占主流。小型的安防用的CS接口攝像機(jī)得到普及、FA行業(yè)則大部分是C接口的攝像機(jī)與鏡頭的組合。對應(yīng)的CCD尺寸、市場上一般根據(jù)用途使用2/3寸到1/3寸的產(chǎn)品。
2
C接口鏡頭可以與C接口攝像機(jī)、CS接口攝像機(jī)互用;?
CS接口鏡頭不可以應(yīng)用在C接口攝像機(jī),只可以應(yīng)用在CS接口攝像機(jī)。?
3
攝像機(jī)如果使用配備小CCD尺寸的鏡頭,那么周邊沒有攝取到圖像的部分呈現(xiàn)出黑色,我們稱其為KERARE。
4
將折射率不同的各種硝材通過研磨,加工成高精度的曲面、把這些鏡頭進(jìn)行組合,就是設(shè)計鏡頭。從伽利略時代開始使用的普遍技術(shù)是其基本原理。為得到更清晰的圖像,一直在研究開發(fā)試制新的硝材和非球面鏡片。
5
常見的線陣相機(jī)分辨率目前有0.5k、1K、2K、4K、6K、8K、12K、16K 等幾種,像素大小有5um、7um、10um、14um 等幾種,這樣芯片的大小從 7..168mm (512x14um) 到 81.920mm (16Kx5um)不等。很顯然,C 接口遠(yuǎn)遠(yuǎn)不能滿足要求,因為C接口最大只能接 22 mm 的芯片,也就是1.3英寸。所以很多相機(jī)的接口為 F型,不同的鏡頭接口對應(yīng)不同的后背焦(Flange distance),也就決定了鏡頭的工作距離不一樣。
光學(xué)放大倍率(β,Magnification):確定了相機(jī)分辨率和像素大小,就可以計算出芯片尺寸(Sensor size);芯片尺寸除以視野范圍(FOV)就等于光學(xué)放大倍率。β=CCD/FOV
接口(Mount):主要有 C、CS、F、M42x1 、T2、M72x0.75等幾種,確定了之后,就可知道對應(yīng)接口的長度。
后背焦(Flange Distance):后背焦指相機(jī)接口平面到芯片的距離,是一個非常重要的參數(shù),由相機(jī)廠家根據(jù)自己的光路設(shè)計確定。不同廠家的相機(jī),哪怕是接口一樣,也可能有不同的后背焦。
有了光學(xué)放大倍率、接口、后背焦,就能計算出工作距離和節(jié)圈長度。選好這些之后,還有一個重要的環(huán)節(jié),就是看 MTF 值是否足夠好?很多機(jī)器視覺工程師不了解 MTF,而對高端鏡頭來說就必須用 MTF 來衡量光學(xué)品質(zhì)。MTF 涵蓋了對比度、分辨率、空間頻率、色差等相當(dāng)豐富的信息,并且非常詳細(xì)地表達(dá)了鏡頭中心和邊緣各處的光學(xué)質(zhì)量。關(guān)于 MTF 表格,請自行了解,這里不再贅述。
鏡頭不僅只是工作距離、視野范圍滿足要求,邊緣的對比度不夠好,也要重新考慮是否選擇更高分辨率的鏡頭。
五、光源篇--選擇合適光源的重要性
機(jī)器視覺是用機(jī)器代替人眼來做測量和判斷;機(jī)器視覺系統(tǒng)主要包含相機(jī)、鏡頭、光源、圖像處理系統(tǒng)和執(zhí)行機(jī)構(gòu)。而光源作為其中重要組成部分,直接關(guān)系到系統(tǒng)的成敗。在視覺系統(tǒng)中圖像是核心,選擇合適的光源能夠呈現(xiàn)一幅好的圖像,能夠簡化算法 提高系統(tǒng)穩(wěn)定性,一幅圖像如果曝光過度則會隱藏很多重要的信息;出現(xiàn)陰影則會引起邊緣誤判;圖像不均勻則會導(dǎo)致閾值選擇困難。因此要保證有較好的圖像效果,就必須要選擇一個合適的光源。
目前理想的視覺光源有高頻熒光燈、光纖鹵素?zé)簟㈦瘹鉄簟?LED光源。應(yīng)用最多是 LED光源,主要有如下幾個特點:
·可制成各種形狀、尺寸及各種照射角度;
·可根據(jù)需要制成各種顏色,并可以隨時調(diào)節(jié)亮度;
·通過散熱裝置,散熱效果更好,光亮度更穩(wěn)定;
·使用壽命長;
·反應(yīng)快捷,可在10微秒或更短的時間內(nèi)達(dá)到最大亮度;
·電源帶有外觸發(fā),可以通過計算機(jī)控制,起動速度快,可以用作頻閃燈;
·運行成本低、壽命長的LED,會在綜合成本和性能方面體現(xiàn)出更大的優(yōu)勢;
·可根據(jù)客戶的需要,進(jìn)行特殊設(shè)計。
這里就詳細(xì)介紹幾種常見的 LED光源。
 機(jī)器視覺照明技術(shù)基礎(chǔ)知識
機(jī)器視覺照明技術(shù)基礎(chǔ)知識

常見的光源類型及照明方式
LED光源按形狀分類
1
高密度LED陣列,高亮度;多種緊湊設(shè)計,節(jié)省安裝空間;LED燈珠排布成環(huán)形與圓心軸成一定夾角, 提供不同照射角度、不同顏色組合,更能突出物體的三維信息;解決多方向照明陰影問題;圖像出現(xiàn)燈影情況可選配漫射板,讓光線均勻擴(kuò)散。
應(yīng)用領(lǐng)域:螺絲尺寸缺陷檢測,IC定位字符檢測,電路板焊錫檢查,PCB基板檢測,IC元件檢測,顯微鏡照明,液晶校正,塑膠容器檢測等。
2
用高密度LED陣列面提供高強(qiáng)度背光照明,LED燈珠排布成一個面(底面發(fā)光)或者從光源四周排布一圈(側(cè)面發(fā)光),常用于突出物體的外形輪廓特征,適用于大面積照射,背光一般放置于物體底部需要考慮機(jī)構(gòu)是否適合安裝,在較高的檢測精度下可以加強(qiáng)出光平行性來提升檢測精度。尤其適合作為顯微鏡的載物臺。紅白兩用背光源、紅藍(lán)多用背光源,能調(diào)配出不同顏色,滿足不同被測物多色要求。
應(yīng)用領(lǐng)域:機(jī)械零件尺寸及邊緣缺陷的測量,飲料液位及雜質(zhì)檢測、手機(jī)屏漏光檢測,印刷海報缺陷檢測,塑料膜邊緣接縫檢測,機(jī)械零件尺寸的測量,電子元件、IC的外型檢測,膠片污點檢測,透明物體劃痕檢測等。
3
LED燈珠排布成長條形。多用于單邊或多邊以一定角度照射物體。突出物體的邊緣特征,可根據(jù)實際情況多條自由組合,照射角度與安裝距離隨有較好自由度。條形光源是較大方形結(jié)構(gòu)被測物的首選光源;顏色可根據(jù)需求搭配,自由組合;照射角度與安裝隨意可調(diào)。
應(yīng)用領(lǐng)域:電子元件縫隙檢測,圓柱體表面缺陷檢測,包裝盒印刷檢測,藥水袋輪廓檢測等。金屬表面檢查,圖像掃描,表面裂縫檢測,LCD面板檢測等。
4
經(jīng)面光源采用分光鏡設(shè)計。適用于粗糙程度不同、反光強(qiáng)或不平整的表面區(qū)域,檢測雕刻圖案、裂縫、劃傷、低反光與高反光區(qū)域分離、消除陰影等。需要注意的是同軸光源經(jīng)過分光設(shè)計有一定的光損失需要考慮亮度,并且不適用于大面積照射。應(yīng)用:玻璃和塑料膜輪廓和定位檢測, IC字符及定位檢測,晶片表面雜質(zhì)和劃痕檢測等。
同軸光源可以消除物體表面不平整引起的陰影,從而減少干擾;部分采用分光鏡設(shè)計,減少光損失,提高成像清晰度,均勻照射物體表面。
應(yīng)用領(lǐng)域:系列光源最適宜用于反射度極高的物體,如金屬、玻璃、膠片、晶片等表面的劃傷檢測,芯片和硅晶片的破損檢測,Mark點定位,包裝條碼識別。
5
不同角度的三色光照明,照射凸顯焊錫三維信息;外加漫射板導(dǎo)光,減少反光;不同角度組合;
應(yīng)用領(lǐng)域:用于電路板焊錫檢測。
6
具有積分效果的半球面內(nèi)壁,均勻反射從底部360度發(fā)射出的光線,使整個圖像的照度十分均勻。
應(yīng)用領(lǐng)域:合于曲面,表面凹凸,弧形表面檢測,或金屬、玻璃表面反光較強(qiáng)的物體表面檢測。
7
高亮 LED排布,超高亮度,采用導(dǎo)光柱聚光,光線呈一條亮帶, 通常用于線陣相機(jī),采用側(cè)向照射或底部照射,線光源也可以不使用聚光透鏡讓光線發(fā)散,增加照射面積也可在前段添加分光鏡,轉(zhuǎn)變?yōu)橥S線光源。
應(yīng)用領(lǐng)域:陣相機(jī)照明專用,AOI專用,適用于各種流水線連續(xù)檢測場合。液晶屏表面灰塵檢測,玻璃劃痕及內(nèi)部裂紋檢測,布匹紡織均勻檢測等。
8
大功率LED,體積小,發(fā)光強(qiáng)度高;光纖鹵素?zé)舻奶娲罚?span style="letter-spacing: 0.544px; widows: 1; background-color: rgb(242, 242, 242);">一種非直接同軸光源,檢測視野較小,尤其適合作為鏡頭的同軸光源等;高效散熱裝置,大大提高光源的使用壽命。
應(yīng)用領(lǐng)域:適合遠(yuǎn)心鏡頭使用,用于芯片檢測,Mark點定位,晶片及液晶玻璃底基校正。
9
四邊配置條形光,每邊照明獨立可控;可根據(jù)被測物要求調(diào)整所需照明角度,適用性廣。
應(yīng)用案例:CB基板檢測,IC元件檢測,焊錫檢查,Mark點定位,顯微鏡照明,包裝條碼照明,球形物體照明等。
10
圓頂光源:LED燈珠安裝在底部通過半球內(nèi)壁反射涂層漫反射均勻照射物體。圖像整體的照度十分均勻, 適用反光較強(qiáng)金屬、 玻璃、凹凸表面、弧形表面檢測。
應(yīng)用領(lǐng)域:儀表盤刻度檢測,金屬罐字符噴碼檢測,芯片金線檢測,電子元件印刷檢測等。
11
對位速度快;視場大;精度高;體積小,便于檢測集成;亮度高,可選配輔助環(huán)形光源。
應(yīng)用領(lǐng)域:VA系列光源是全自動電路板印刷機(jī)對位的專用光源。
一套完整的視覺檢測系統(tǒng)主要包含圖像采集部分和圖像分析部分,而圖像采集部分主要由工業(yè)相機(jī)、工業(yè)鏡頭以及機(jī)器視覺光源承擔(dān),今天我們主要介紹機(jī)器視覺光源的相關(guān)基礎(chǔ)知識及選型技巧。
首先我們需要了解,機(jī)器視覺中的光源起到哪些作用:
1. 照亮目標(biāo),提高亮度;
2. 形成有利于圖像處理的成像效果,降低系統(tǒng)的復(fù)雜性和對圖像處理算法的要求;
3. 克服環(huán)境光干擾,保證圖像穩(wěn)定性,提高系統(tǒng)的精度、效率。
恰當(dāng)?shù)墓庠凑彰髟O(shè)計可以使圖像中的目標(biāo)信息與背景信息得到最佳分離,這樣不僅大大降低圖像處理的算法難度,同時也提高系統(tǒng)的精度和可靠性。但非常遺憾,目前沒有通用的機(jī)器視覺照明系統(tǒng)應(yīng)對不同的檢測要求,因此針對每個特定的案例,都需要設(shè)計合適的照明裝置,以達(dá)到最佳效果。而不合適的照明,則會引起很多問題,機(jī)器視覺光源如此重要,卻往往被很多人忽視。
光源的選型
1
1、檢測內(nèi)容
外觀檢查、OCR、尺寸測定、定位
2、對象物
①想看什么?(異物、傷痕、缺損、標(biāo)識、形狀等)
②表面狀態(tài)(鏡面、糙面、曲面、平面)
③立體?平面?
④材質(zhì)、表面顏色
⑤視野范圍?
⑥動態(tài)還是靜態(tài)(相機(jī)快門速度)
3、限制條件
①工作距離(鏡頭下端到被測物表面距離)
②設(shè)置條件(照明的大小、照明下端到被測物表面的距離、反射型or透射型)
③周圍環(huán)境(溫度、外亂光)
④相機(jī)的種類,面陣or線陣
2
1.因材質(zhì)和厚度不同、對光的透過特性(透明度)各異。
2.光根拠其波長之長短、對物質(zhì)的穿透能力(穿透率)各異。
3.光的波長越長、對物質(zhì)的透過力越強(qiáng),光的波長越短、在物質(zhì)表面的拡散率越大。
4.透射照明、即是使光線透射對象物、并観察其透過光之照明手法。
3
1.穏定均勻的光源極其重要
2.目的:將被測物與背景盡量明顕區(qū)分
3.摂取圖像時、最重要之處是如何鮮明地獲得:被測物與背景的濃淡差
4.目前、在圖像處理領(lǐng)域中最廣范的技術(shù)手法是:二值化(白黒)處理
為了能夠突出特征點,將特征圖像突出出來,在打光手法上,常用的包括有明視野與暗視野。
明視野:用直射光來観察對象物整體(散亂光呈黒色)
暗視野:用散亂光來観察對象物整體(直射光呈白色)
具體的光源選取方法還在于試驗的實踐經(jīng)驗。
4
根據(jù)檢測產(chǎn)品特征選擇,一般選擇光源的大小要比產(chǎn)品大,這樣照射的光線才能覆蓋到整個產(chǎn)品;選擇的光源的形狀接近產(chǎn)品形狀,可以讓整個產(chǎn)品區(qū)域光照強(qiáng)度一致;光源顏色選擇是要能夠讓檢測目標(biāo)與背景有一定對比度, 在黑白相機(jī)下使用與產(chǎn)品目標(biāo)區(qū)域顏色接近的光源能夠該區(qū)域呈現(xiàn)更高的灰度,反之則呈現(xiàn)較低灰度;如果產(chǎn)品表面反光較強(qiáng)可以選用均勻性更好的無影光源, 目標(biāo)特征不明顯則選用指向性或平行性更好的光源。
根據(jù)機(jī)構(gòu)要求,光源能夠滿足設(shè)備的安裝空間,產(chǎn)線的速度快就需要選擇亮度更高的光源;在特殊環(huán)境(潮濕、高溫)就需要考慮光源性能(防水、散熱)。
實際測試,光源照射能夠呈現(xiàn)有效對比度,也要保證各個區(qū)域的均勻性。一般在檢測區(qū)域目標(biāo)和背景一個接近 255 灰度的峰值,這個時候?qū)Ρ榷纫话阕罡呒訌?qiáng)或減弱光源亮度都會影響對比度差值。當(dāng)出現(xiàn)較好對比圖像時一定要把檢測物體放在視野內(nèi)的各個位置看看圖像是否一致,這樣才能保證在實際環(huán)境中的穩(wěn)定性。
光源選型基本要素:
對比度:對比度對機(jī)器視覺來說非常重要。機(jī)器視覺應(yīng)用的照明的最重要的任務(wù)就是使需要被觀察的特征與需要被忽略的圖像特征之間產(chǎn)生最大的對比度,從而易于特征的區(qū)分。對比度定義為在特征與其周圍的區(qū)域之間有足夠的灰度量區(qū)別。好的照明應(yīng)該能夠保證需要檢測的特征突出于其他背景。
熱門文章推薦:點擊直接進(jìn)入相關(guān)文章:
001:計算機(jī)視覺領(lǐng)域研究資源及期刊、會議介紹
003:120圖勾勒全球AI產(chǎn)業(yè)完整圖譜!
004:Facebook 開源計算機(jī)視覺系統(tǒng),從像素水平理解圖像(附論文及代碼)
005:想成為機(jī)器學(xué)習(xí)工程師?這份自學(xué)指南你值得收藏
007:圖像處理與計算機(jī)視覺基礎(chǔ),經(jīng)典以及最近發(fā)展
009:從洗衣妹到谷歌首席科學(xué)家,她靠孤獨改變了人工智能界!
012:如何裝備一個學(xué)術(shù)型的 iPad ?
015:為什么最好的機(jī)械臂是7個自由度,而不是6個?
017:機(jī)器人10大流行編程語言對比,你掌握了哪種?
019:機(jī)器人控制系統(tǒng)相關(guān)知識大匯集
020:機(jī)器人的工作原理,史上最詳細(xì)的解析!
021:光源選型知識點
022:這才是機(jī)械手,這才是自動化,你那算什么?
023:攝像機(jī)和鏡頭的基礎(chǔ)知識
024:物聯(lián)網(wǎng)產(chǎn)業(yè)鏈全景圖(附另13大電子行業(yè)全景圖,必收藏)
025:日本到底強(qiáng)大到什么地步?讓人窒息!看后一夜未眠
026:德國機(jī)械用行動驚艷全世界:無敵是多么寂寞
