
用于自動(dòng)駕駛的實(shí)時(shí)車道線檢測(cè)和智能告警
點(diǎn)擊上方“小白學(xué)視覺(jué)”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

本文轉(zhuǎn)自:計(jì)算機(jī)視覺(jué)life
車道線檢測(cè) + 距離告警 + 轉(zhuǎn)彎曲率半徑計(jì)算。
代碼:https://github.com/MaybeShewill-CV/lanenet-lane-detection
自動(dòng)駕駛將在未來(lái)十年給旅行帶來(lái)革命性的變化。目前,自動(dòng)駕駛應(yīng)用正在進(jìn)行各種應(yīng)用案例的測(cè)試,包括乘用車、機(jī)器人出租車、自動(dòng)商業(yè)送貨卡車、智能叉車和用于農(nóng)業(yè)的自動(dòng)拖拉機(jī)。
自動(dòng)駕駛需要一個(gè)計(jì)算機(jī)視覺(jué)感知模塊來(lái)理解和導(dǎo)航環(huán)境。感知模塊的作用包括:
檢測(cè)車道線 檢測(cè)其他物體:車輛、人、環(huán)境中的動(dòng)物 跟蹤檢測(cè)到的對(duì)象 預(yù)測(cè)他們可能的運(yùn)動(dòng)
一個(gè)好的感知系統(tǒng)應(yīng)該能夠在各種駕駛條件下 —— 白天/晚上,夏天/冬天,雨雪等等,實(shí)時(shí)做到這一點(diǎn)。在這篇博客中,我們著眼于一個(gè)實(shí)時(shí)模型,用于檢測(cè)車道線、其他車輛等,并生成警報(bào)。
車道檢測(cè)問(wèn)題通常被定義為語(yǔ)義或?qū)嵗指顔?wèn)題,目標(biāo)是識(shí)別屬于車道類別的像素。
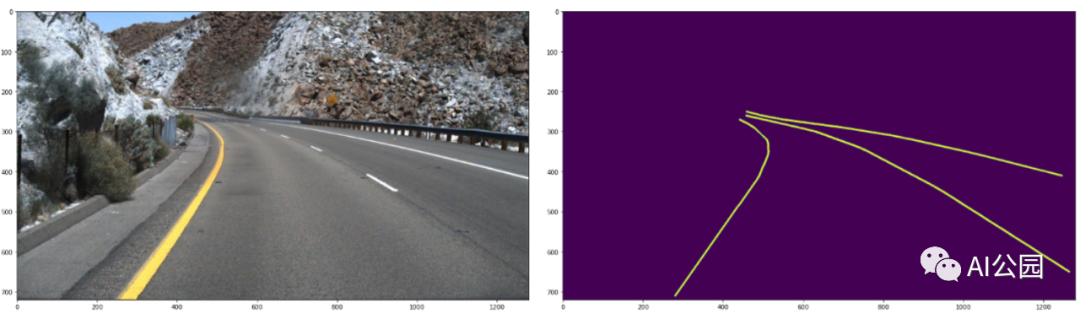
TUSimple是車道檢測(cè)任務(wù)常用的數(shù)據(jù)集。該數(shù)據(jù)集包含3626個(gè)道路場(chǎng)景的標(biāo)注視頻剪輯。每個(gè)剪輯有20幀。這些數(shù)據(jù)是通過(guò)安裝在車上的攝像頭捕捉到的。下面分享了一個(gè)示例圖像及其標(biāo)注。
在這個(gè)數(shù)據(jù)集上,我們可以訓(xùn)練一個(gè)語(yǔ)義分割模型來(lái)分割出屬于lane類的像素。U-Net model非常適合做這個(gè),因?yàn)樗且粋€(gè)具有實(shí)時(shí)推理速度的輕量級(jí)模型。U-Net是一種帶有跳躍連接的編譯碼器和解碼器模塊的編譯碼器模型。模型架構(gòu)如下所示。
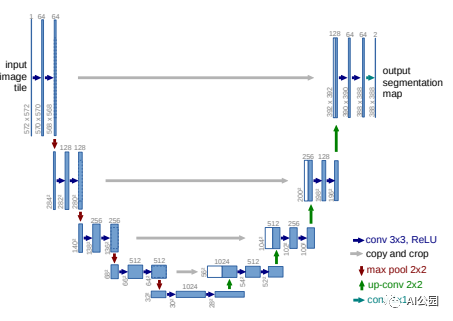
然而,損失函數(shù)需要修改為Dice損失系數(shù)。車道線分割問(wèn)題是一個(gè)極其不平衡的數(shù)據(jù)問(wèn)題。圖像中的大多數(shù)像素屬于背景類。Dice Loss基于Sorenson-Dice系數(shù),其對(duì)false positives和false negatives的重要性相似,這使得它在處理不平衡數(shù)據(jù)問(wèn)題時(shí)表現(xiàn)得更好。Dice損失試圖匹配groundtruth和預(yù)測(cè)模型中的車道線像素,希望能夠得到一個(gè)清晰的邊界預(yù)測(cè)。
這里,我使用了LaneNet模型來(lái)生成車道線。LaneNet模型是一種兩階段車道線預(yù)測(cè)器。第一階段是一個(gè)編碼器-解碼器模型,為車道線創(chuàng)建分割掩碼。第二階段是車道先定位網(wǎng)絡(luò),從掩碼中提取的車道點(diǎn)作為輸入,使用LSTM學(xué)習(xí)一個(gè)二次函數(shù)來(lái)預(yù)測(cè)車道線點(diǎn)。
下圖顯示了這兩個(gè)階段的運(yùn)行情況。左邊是原始圖像,中間是階段1的車道線掩碼輸出,右邊是階段2的最終輸出。

我將車道線預(yù)測(cè)與物體檢測(cè)結(jié)合起來(lái),生成智能警報(bào)。這些智能警報(bào)可能涉及:
檢測(cè)其他車輛是否在車道線內(nèi),并量度與他們的距離 檢測(cè)鄰近車道上是否有車輛的存在 了解彎曲道路的轉(zhuǎn)彎半徑
在這里,我使用YOLO-v5來(lái)檢測(cè)道路上的汽車和人。YOLO-v5在檢測(cè)道路上的其他車輛方面做得很好。推理時(shí)間也非常快。
下面我們用YOLO v5來(lái)測(cè)量自己的車和前面最近的車的距離。模型返回的距離以像素為單位,可以根據(jù)相機(jī)參數(shù)轉(zhuǎn)換成米。由于TUSimple數(shù)據(jù)集的相機(jī)參數(shù)未知,我根據(jù)車道線的標(biāo)準(zhǔn)寬度估計(jì)了像素到米的轉(zhuǎn)換。

我們可以類似地計(jì)算車道的曲率半徑,并將其用于汽車的轉(zhuǎn)向模塊。

在這篇博客中,我們探討了在自動(dòng)駕駛中準(zhǔn)確和快速檢測(cè)車道線的問(wèn)題。然后,我們使用YOLOv5來(lái)構(gòu)建對(duì)道路上其他物體的理解。這可以用來(lái)生成智能警報(bào)。
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺(jué)、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺(jué)SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~