
自動駕駛 | 車道檢測實用算法
點擊上方“小白學(xué)視覺”,選擇加"星標"或“置頂”
重磅干貨,第一時間送達

-
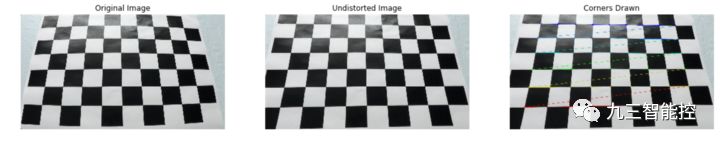
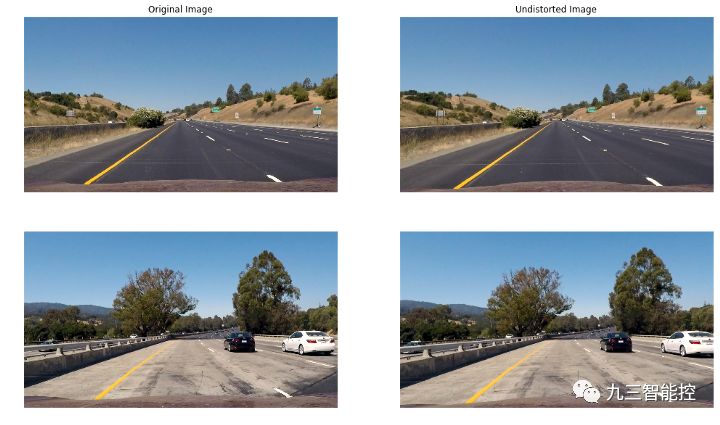
攝像頭校準,以移除鏡頭畸變(Lens distortion)的影響 -
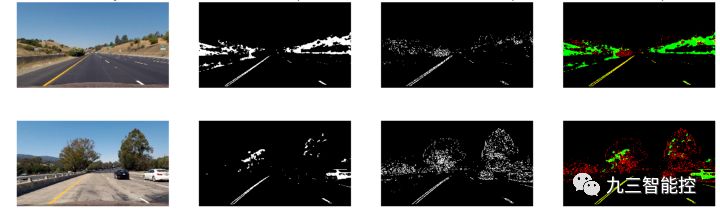
圖像前處理,用于識別車道線 -
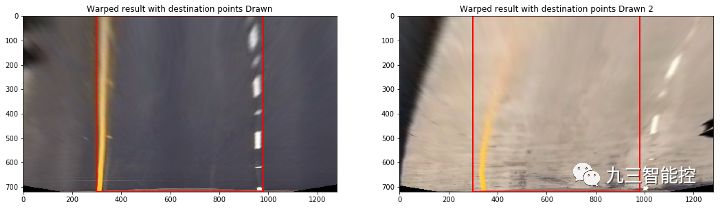
道路視角變換(Perspective transform) -
車道線檢測 -
車輛定位和車道半徑計算
攝像頭輸出的視頻可以看做一系列圖像的時間序列。鏡頭的結(jié)構(gòu)特性造成利用針孔攝像機拍攝的圖像容易發(fā)生徑向畸變,導(dǎo)致根據(jù)物體與光軸的距離而導(dǎo)致不一致的放大。

解決了攝像頭圖像失真問題后,我們繼續(xù)探索檢測車道的算法。在計算機視覺領(lǐng)域,分離和檢測對象的一種常用方法是使用顏色變換和梯度來生成一個具有過濾閾值的二值化圖像。
車道檢測的難點在于準確獲得車道線的方向以及角度。在攝像頭的默認視角下,遠離攝像機的物體顯得更小,同時車道線在遠離汽車的方向逐漸相交,這和實際情況是不符的。解決這種視點扭曲的一種方法是改變圖像的視角,比如可以從上往下看(鳥瞰圖)。

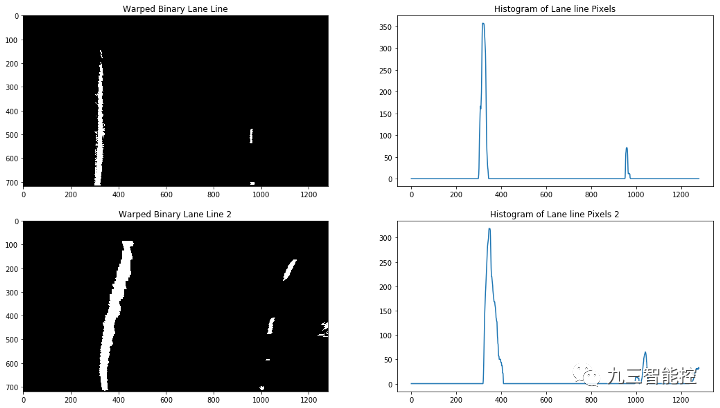
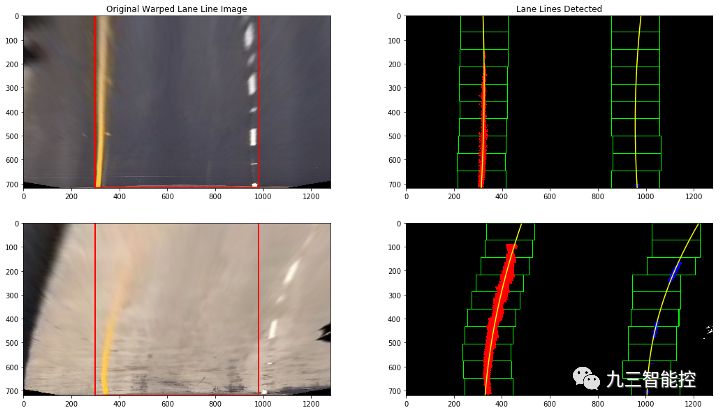
下面,我們正式開始進行車道檢測。在前面的各步驟中,我們進行了圖像的二元閾值化和視角變換,最終獲得一個黑白圖像,其中白色的像素代表我們試圖檢測的車道線的部分。

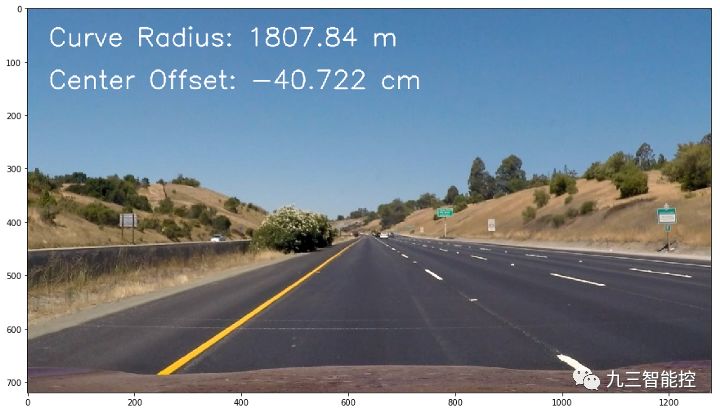
最后,利用兩個檢測到的車道線的位置,并假設(shè)攝像頭位于圖像的中心位置,可以計算出汽車相對于車道的位置。根據(jù)圖像的分辨率,能夠進行從像素到米的換算。
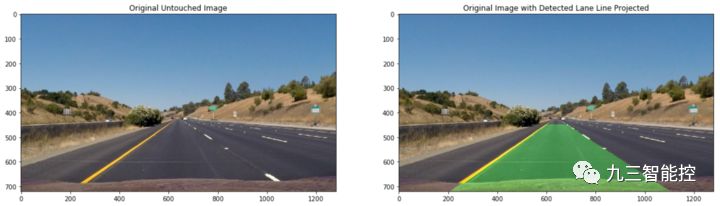
以上介紹了自動駕駛中進行車道線檢測的實用算法,我們通過一個多邊形投影區(qū)域來顯示檢測結(jié)果,可以看到檢測結(jié)果與實際非常吻合。
聲明:部分內(nèi)容來源于網(wǎng)絡(luò),僅供讀者學(xué)習(xí)、交流之目的文章版權(quán)歸原作者所有。如有不妥,請聯(lián)系刪除。
下載1:OpenCV-Contrib擴展模塊中文版教程
在「小白學(xué)視覺」公眾號后臺回復(fù):擴展模塊中文教程,即可下載全網(wǎng)第一份OpenCV擴展模塊教程中文版,涵蓋擴展模塊安裝、SFM算法、立體視覺、目標跟蹤、生物視覺、超分辨率處理等二十多章內(nèi)容。
下載2:Python視覺實戰(zhàn)項目52講
在「小白學(xué)視覺」公眾號后臺回復(fù):Python視覺實戰(zhàn)項目,即可下載包括圖像分割、口罩檢測、車道線檢測、車輛計數(shù)、添加眼線、車牌識別、字符識別、情緒檢測、文本內(nèi)容提取、面部識別等31個視覺實戰(zhàn)項目,助力快速學(xué)校計算機視覺。
下載3:OpenCV實戰(zhàn)項目20講
在「小白學(xué)視覺」公眾號后臺回復(fù):OpenCV實戰(zhàn)項目20講,即可下載含有20個基于OpenCV實現(xiàn)20個實戰(zhàn)項目,實現(xiàn)OpenCV學(xué)習(xí)進階。
交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動駕駛、計算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會逐漸細分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會根據(jù)研究方向邀請進入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會請出群,謝謝理解~