
導(dǎo)師給我的課題是激光SLAM,應(yīng)該如何入門?
點(diǎn)擊下方卡片,關(guān)注“新機(jī)器視覺”公眾號(hào)
視覺/圖像重磅干貨,第一時(shí)間送達(dá)
小虎哥哥愛學(xué)習(xí):
1.1.關(guān)于SLAM
1.2.關(guān)于ROS
1.3.SLAM與ROS的關(guān)系 2.ROS移動(dòng)機(jī)器人的整體構(gòu)造
2.1.硬件構(gòu)造解析
2.2.電機(jī)解析
2.3.電機(jī)驅(qū)動(dòng)板解析
2.4.底盤驅(qū)動(dòng)方式的解析
2.5.IMU模塊解析
2.6.激光雷達(dá)解析
2.7.ROS主機(jī)解析
2.8.攝像頭解析 3.商業(yè)應(yīng)用ROS機(jī)器人
3.1.SLAM建圖導(dǎo)航的應(yīng)用案例
3.2.商業(yè)ROS機(jī)器人相關(guān)公司
3.3.商業(yè)ROS機(jī)器人兩大發(fā)展思路 4.科研學(xué)習(xí)ROS機(jī)器人
4.1.科研學(xué)習(xí)ROS機(jī)器人與商業(yè)應(yīng)用ROS機(jī)器人的區(qū)別
4.2.淘寶上科研學(xué)習(xí)ROS機(jī)器人相關(guān)產(chǎn)品
4.3.選購ROS機(jī)器人入門指南
1.SLAM與ROS的關(guān)系
1.1.關(guān)于SLAM
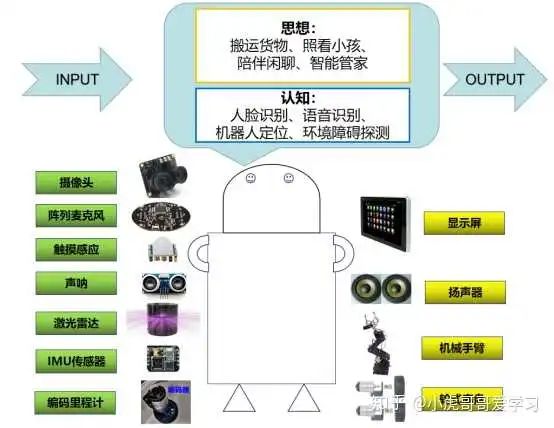
(1)機(jī)器人中的不確定性
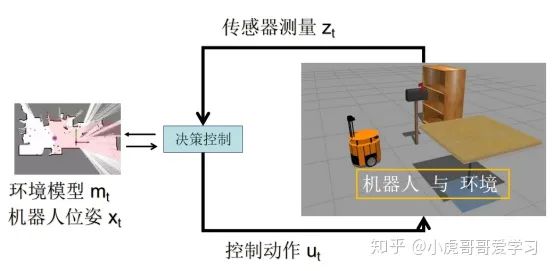
(2)機(jī)器人中的狀態(tài)估計(jì)
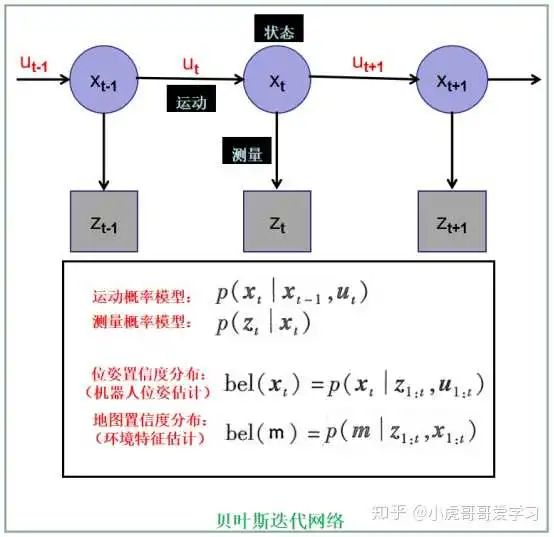
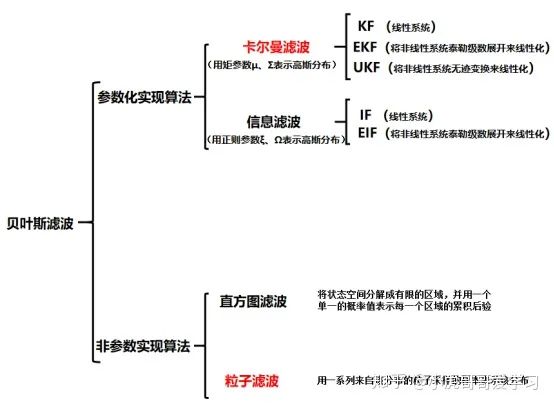
(3)貝葉斯濾波及其各種實(shí)現(xiàn)算法
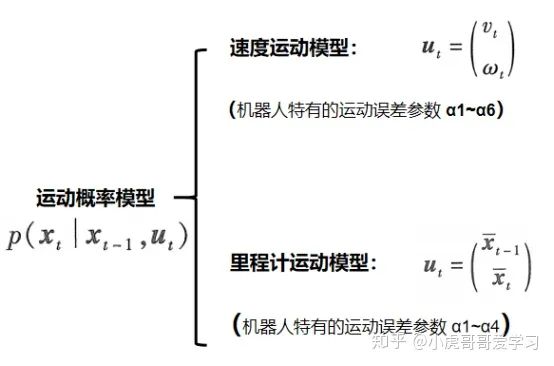
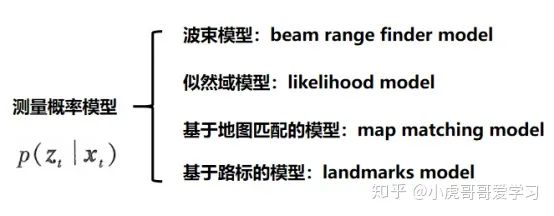
(4)機(jī)器人中的運(yùn)動(dòng)與測(cè)量概率
(5)移動(dòng)機(jī)器人定位與建圖
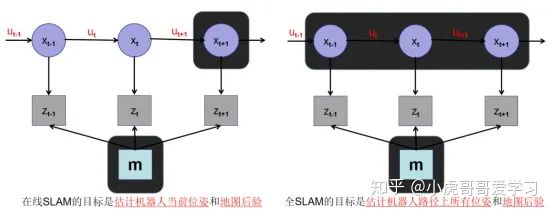
(6)SLAM同時(shí)定位與建圖
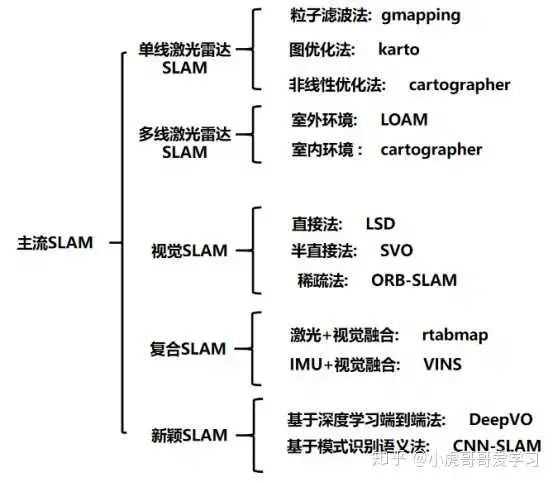
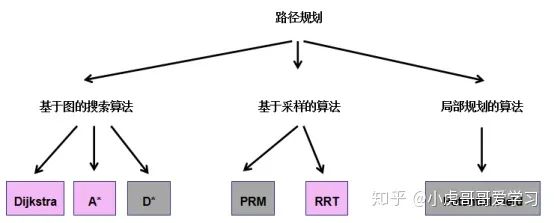
(7)現(xiàn)今主流的SLAM算法
(8)機(jī)器人自主導(dǎo)航與動(dòng)態(tài)避障
1.2.關(guān)于ROS
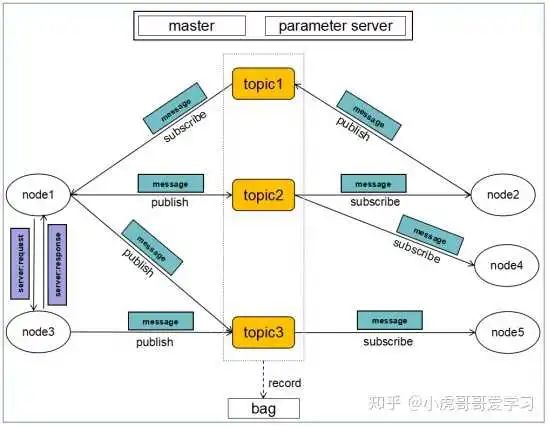
1.3.SLAM與ROS的關(guān)系
2.ROS移動(dòng)機(jī)器人的整體構(gòu)造

3.商業(yè)應(yīng)用ROS機(jī)器人
(1)智慧農(nóng)業(yè)自動(dòng)噴藥機(jī)器人
(2)智慧餐廳送餐機(jī)器人
(3)樓宇送快遞機(jī)器人
(4)大型機(jī)房智能巡檢機(jī)器人
(1)日本軟銀集團(tuán)pepper
(2)北京進(jìn)化者機(jī)器人公司的小胖
(3)上海思嵐科技的ZEUS
(4)上海高仙機(jī)器人公司的室外機(jī)器人
(5)云跡科技的大潤(rùn)機(jī)器人
(6)交通銀行大堂機(jī)器人嬌嬌
(1)核心部件
(2)系統(tǒng)集成
4.科研學(xué)習(xí)ROS機(jī)器人
4.1.科研學(xué)習(xí)ROS機(jī)器人與商業(yè)應(yīng)用ROS機(jī)器人的區(qū)別
4.2.淘寶上科研學(xué)習(xí)ROS機(jī)器人相關(guān)產(chǎn)品
(1)Pioneer先鋒機(jī)器人 (2)Turtlebot海龜機(jī)器人
(2)Turtlebot海龜機(jī)器人 (3)EAI移動(dòng)底盤(4)miiboo語音交互移動(dòng)機(jī)器人
(3)EAI移動(dòng)底盤(4)miiboo語音交互移動(dòng)機(jī)器人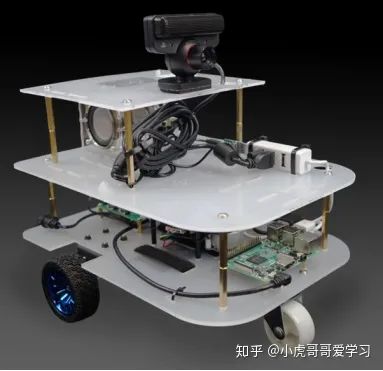
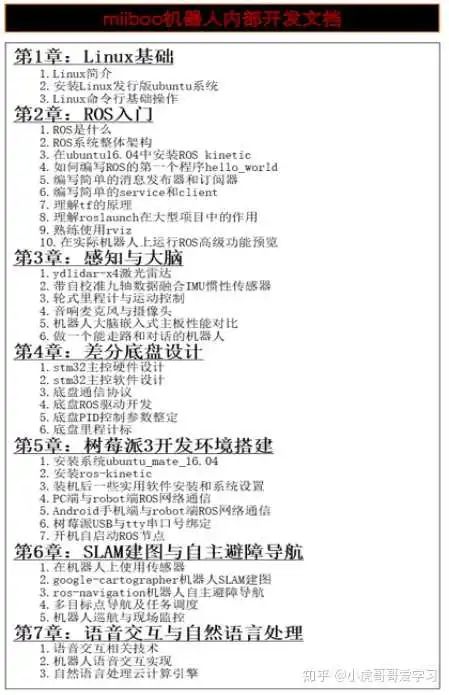 (5)淘寶上眼花繚亂的ROS機(jī)器人
(5)淘寶上眼花繚亂的ROS機(jī)器人
4.3.選購ROS機(jī)器人入門指南
fly qq:
知乎用戶:
—版權(quán)聲明—
僅用于學(xué)術(shù)分享,版權(quán)屬于原作者。
若有侵權(quán),請(qǐng)聯(lián)系微信號(hào):yiyang-sy 刪除或修改!
評(píng)論
圖片
表情