
機(jī)械臂的軌跡規(guī)劃,路徑規(guī)劃,運(yùn)動(dòng)規(guī)劃有什么區(qū)別呢?
點(diǎn)擊下方卡片,關(guān)注“新機(jī)器視覺”公眾號(hào)
重磅干貨,第一時(shí)間送達(dá)
先解決定義問題。名詞定義不重要,但是我們有必要了解它們可能涉及機(jī)器人研究中的哪些工作。
再解決這些工作之間的關(guān)系問題。
機(jī)器人底層控制最終需要的就是一堆電流控制指令,所以,不管是什么任務(wù),最終都需要翻譯成每個(gè)電機(jī)的控制指令。
但是,由于不同任務(wù)的硬件平臺(tái)、任務(wù)需求、約束不同,所以,可能會(huì)不同層次地將任務(wù)進(jìn)行分解。
對(duì)于最簡(jiǎn)單的任務(wù),只要求機(jī)器人從A運(yùn)動(dòng)到B,中間避開障礙物,而不用考慮運(yùn)動(dòng)時(shí)間等問題。
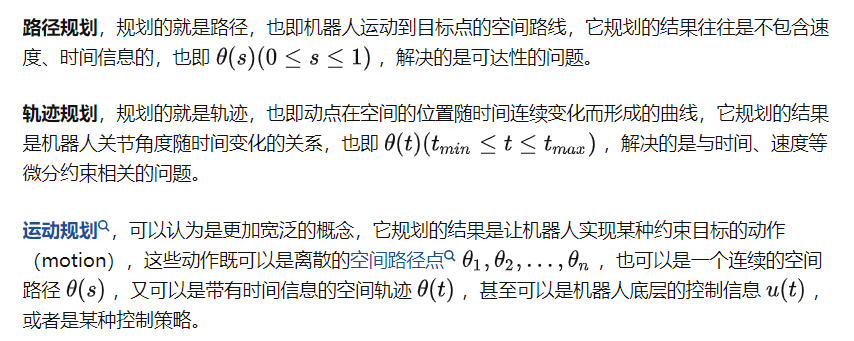
這時(shí)候,基本上規(guī)劃部分只需要進(jìn)行路徑規(guī)劃即可:規(guī)劃器輸出一條幾何路徑θ(s),發(fā)送給機(jī)器人控制器,機(jī)器人控制器自行進(jìn)行路徑點(diǎn)之間的軌跡插補(bǔ)(如T型速度曲線、樣條插值等)。
計(jì)算得到θ(t),并通過PID 之類的閉環(huán)控制算法轉(zhuǎn)換電機(jī)控制指令,控制機(jī)器人完成任務(wù)。例如,之前的一個(gè)回答,要求機(jī)器人運(yùn)動(dòng)的時(shí)候避開相機(jī)視野區(qū)域,就是這樣的問題:
https://www.zhihu.com/question/373986440/answer/1037013860
https://www.zhihu.com/zvideo/1316438365613236224
另一方面,不同任務(wù),即使在其空間路徑相同的情況下,也可能對(duì)軌跡有不同的要求。
例如,有些任務(wù)要求機(jī)器人的運(yùn)動(dòng)時(shí)間最短,有些任務(wù)要求機(jī)器人的運(yùn)動(dòng)節(jié)拍固定,有些任務(wù)要求機(jī)器人的末端勻速運(yùn)動(dòng)。
甚至是,從運(yùn)動(dòng)平穩(wěn)性考慮,需要規(guī)劃出速度、加速度、甚至是加速度連續(xù)的軌跡。對(duì)于這類任務(wù),僅做路徑規(guī)劃就無法滿足要求,往往需要路徑規(guī)劃與軌跡規(guī)劃相結(jié)合。
對(duì)于這類任務(wù),可以先進(jìn)行路徑規(guī)劃,獲得滿足任務(wù)的空間路徑,之后再進(jìn)行軌跡插補(bǔ),獲得需要的軌跡后,通過實(shí)時(shí)通訊的方式,將軌跡發(fā)送給機(jī)器人控制器,通過閉環(huán)控制,得到電機(jī)控制指令。
下面的視頻是相同的路徑,但是不同的軌跡規(guī)劃結(jié)果。分別是時(shí)間最優(yōu)、節(jié)拍固定和末端勻速的軌跡:
《不同約束下得到的不同軌跡》
https://www.zhihu.com/zvideo/1316437536278429696
但是,如果機(jī)器人的運(yùn)動(dòng)軌跡需要滿足某種動(dòng)力學(xué)約束,那么,往往需要規(guī)劃器直接計(jì)算出符合約束的軌跡,而不是分為路徑規(guī)劃和軌跡插補(bǔ)兩部分。
對(duì)于某些任務(wù),規(guī)劃的時(shí)候,環(huán)境的狀態(tài)不完全可觀或者說環(huán)境可能發(fā)生變化。
這時(shí)候,需要的是某種運(yùn)動(dòng)策略,輸入當(dāng)前的環(huán)境與機(jī)器人狀態(tài) s,輸出當(dāng)前時(shí)刻的控制指令 u。
很多強(qiáng)化學(xué)習(xí)的工作,其實(shí)就是在做這類工作,通過 DRL 去學(xué)習(xí)不同狀態(tài)下的控制策略。
所有上面這些場(chǎng)景,都可以是運(yùn)動(dòng)規(guī)劃的范疇。
本文轉(zhuǎn)載自知乎:
https://www.zhihu.com/answer/1601792996
本文僅做學(xué)術(shù)分享,如有侵權(quán),請(qǐng)聯(lián)系刪文。