
三維點云數(shù)據(jù)集
點擊上方“小白學視覺”,選擇加"星標"或“置頂”
重磅干貨,第一時間送達

1
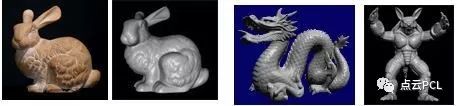
The Stanford 3D Scanning Repository(斯坦福大學的3 d掃描存儲庫)
鏈接:http://graphics.stanford.edu/data/3Dscanrep/
這應(yīng)該是做點云數(shù)據(jù)最初大家用最多的數(shù)據(jù)集,其中包含最開始做配準的Bunny、Happy Buddha、Dragon等模型。
2
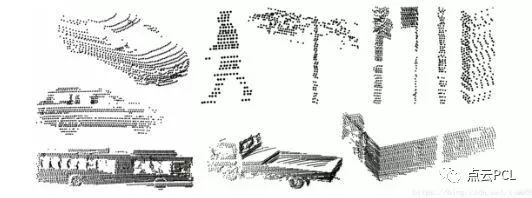
Sydney Urban Objects Dataset(悉尼城市目標數(shù)據(jù)集)
鏈接:http://www.acfr.usyd.edu.au/papers/SydneyUrbanObjectsDataset.shtml
這個數(shù)據(jù)集包含用Velodyne HDL-64E LIDAR掃描的各種常見城市道路對象,收集于澳大利亞悉尼CBD。含有631個單獨的掃描物體,包括車輛、行人、廣告標志和樹木等。可以用來測試匹配和分類算法。
3
?
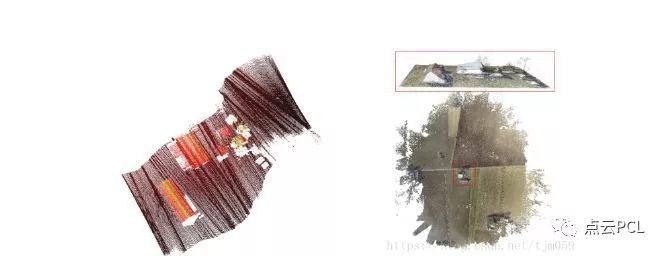
ASL Datasets Repository
鏈接:https://projects.asl.ethz.ch/datasets/doku.php?id=home
這個數(shù)據(jù)集包含的數(shù)據(jù)比較多類,由Automonous Systems Lab提供的數(shù)據(jù),一般數(shù)據(jù)集都有對應(yīng)發(fā)表的論文成果。下邊只列出一些下載過,用過的。
(1)IORS2018:目標檢測和匹配
(2)IJRR2012:測試點云配準算法
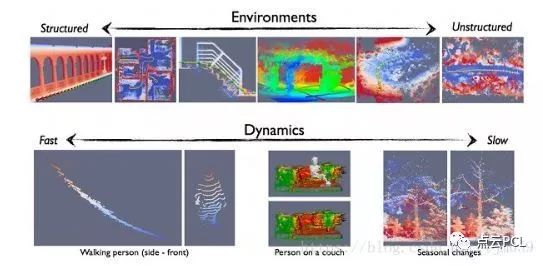
(3)ISER2016:可用作點云配準(有源碼)
源碼鏈接:https://github.com/ethz-asl/robust_point_cloud_registration
4
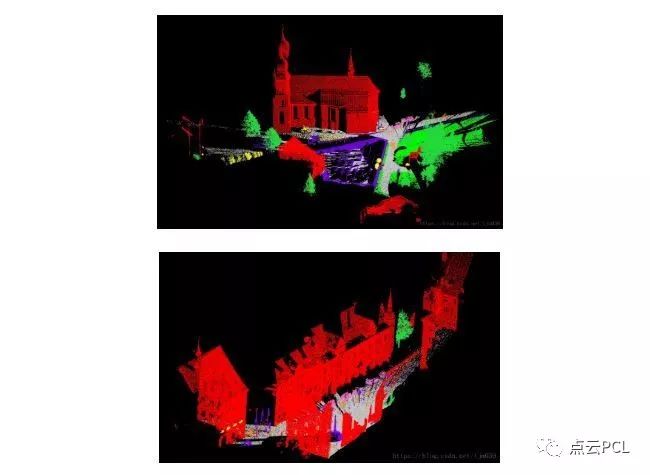
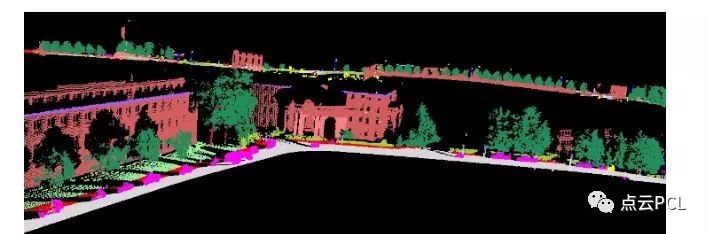
Large-Scale Point Cloud Classification Benchmark(大規(guī)模點云分類基準)
鏈接:http://www.semantic3d.net/
這個數(shù)據(jù)庫是做大規(guī)模點云分類的,提供了一個大的自然場景標記的3D點云數(shù)據(jù)集,總計超過40億點。涵蓋了各種各樣的城市場景:教堂、街道、鐵路軌道、廣場、村莊、足球場、城堡等等。
5
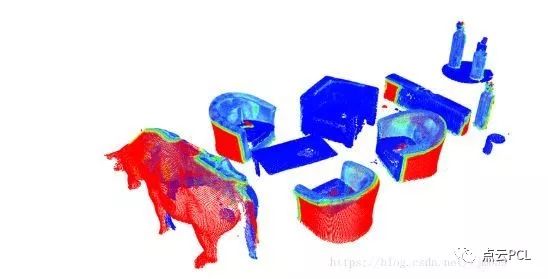
RGB-D Object Dataset(RGB-D對象數(shù)據(jù)集)
鏈接:http://rgbd-dataset.cs.washington.edu/index.html
RGB-D對象數(shù)據(jù)集是300個常見的家庭對象的大數(shù)據(jù)集。該數(shù)據(jù)集是使用Kinect風格的3D相機記錄的,該相機以30Hz記錄同步和對齊的640x480RGB和深度圖像。對于每個物體,有3個視頻序列,每個視頻序列用安裝在不同高度的照相機記錄,以便從與地平線的不同角度觀察物體。除了300個對象的孤立視圖之外,RGB-D對象數(shù)據(jù)集還包括22個帶有注釋的自然場景視頻序列,其中包含來自數(shù)據(jù)集的對象。這些場景覆蓋了常見的室內(nèi)環(huán)境,包括辦公室工作區(qū)、會議室和廚房區(qū)域。

6
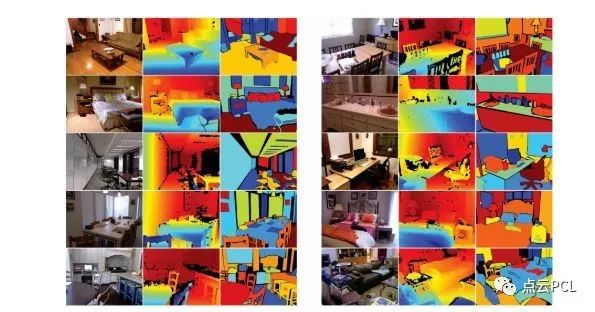
NYU-Depth(紐約大學深度數(shù)據(jù)集)
鏈接:https://cs.nyu.edu/~silberman/datasets/
這個數(shù)據(jù)集應(yīng)該也是大家比較熟悉的,包括NYU-Depth V1數(shù)據(jù)集和NYU-Depth V2數(shù)據(jù)集,都是由來自各種室內(nèi)場景的視頻序列組成,這些視頻序列由來自Microsoft Kinect的RGB和Depth攝像機記錄。
NYU-Depth V1數(shù)據(jù)集包含有64種不同的室內(nèi)場景、7種場景類型、108617無標記幀和2347密集標記幀以及1000多種標記類型。
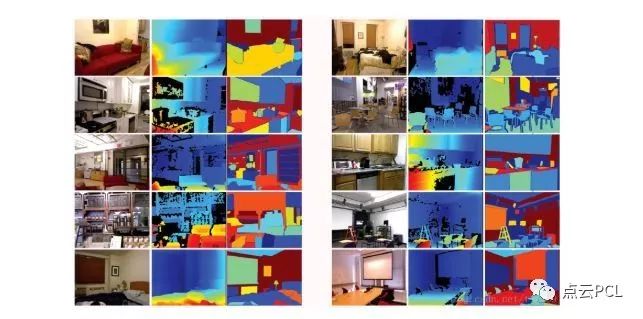
?NYU-Depth V2數(shù)據(jù)集包含了1449個密集標記的對齊RGB和深度圖像對、來自3個城市的464個新場景,以及407024個新的無標記幀。
7
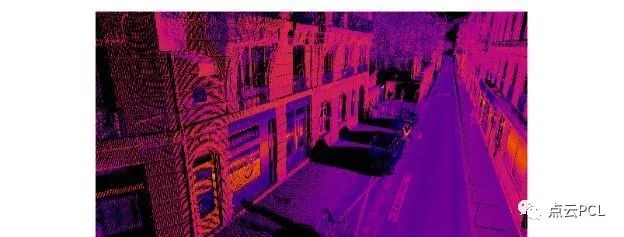
IQmulus & TerraMobilita Contest
鏈接:http://data.ign.fr/benchmarks/UrbanAnalysis/#
該數(shù)據(jù)庫包含來自巴黎(法國)密集城市環(huán)境的3DMLS數(shù)據(jù),由3億點組成。在該數(shù)據(jù)庫中,對整個3D點云進行分割和分類,即每個點包含一個標簽和一個類。因此,對檢測-分割-分類方法進行逐點評估成為可能。這個數(shù)據(jù)庫是在iQmulus和TerraMobilita項目的框架內(nèi)產(chǎn)生的。它被法國國家制圖局(IGN)開發(fā)的MLS系統(tǒng)“ Stereopolis II”收購。注釋將由IGN的MATIS實驗室手動輔助進行。

8
Oakland 3-D Point Cloud Dataset(奧克蘭?)
鏈接:http://www.cs.cmu.edu/~vmr/datasets/oakland_3d/cvpr09/doc/
這個數(shù)據(jù)庫的采集地點是在美國卡耐基梅隆大學周圍,數(shù)據(jù)采集使用Navlab11,配備側(cè)視SICK LMS激光掃描儀,用于推掃。其中包含了完整數(shù)據(jù)集、測試集、訓練集和驗證集。
9
The KITTI?Vision Benchmark Suite
鏈接:http://www.cvlibs.net/datasets/kitti/
這個數(shù)據(jù)集來自德國卡爾斯魯厄理工學院的一個項目,其中包含了利用KIT的無人車平臺采集的大量城市環(huán)境的點云數(shù)據(jù)集(KITTI),這個數(shù)據(jù)集不僅有雷達、圖像、GPS、INS的數(shù)據(jù),而且有經(jīng)過人工標記的分割跟蹤結(jié)果,可以用來客觀的評價大范圍三維建模和精細分類的效果和性能。
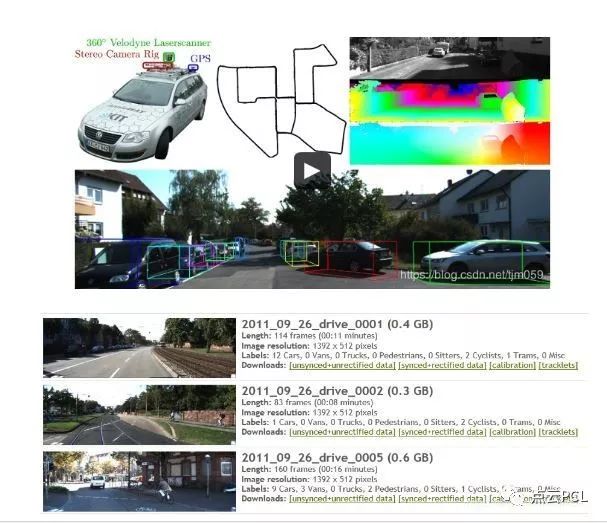
其中,該團隊還介紹了一些相關(guān)的數(shù)據(jù)集,可以參考:
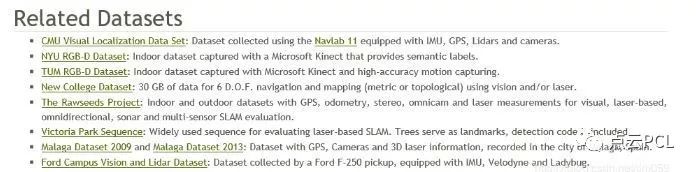
10
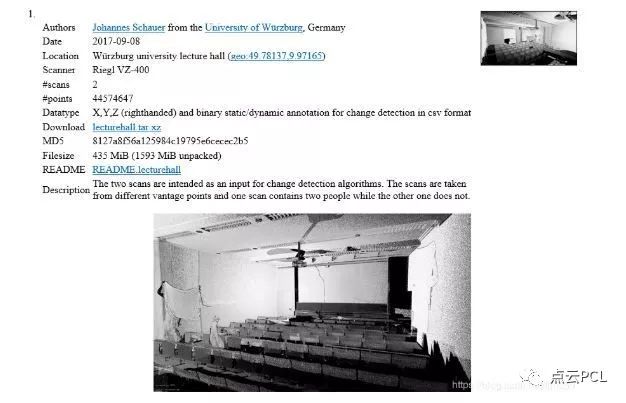
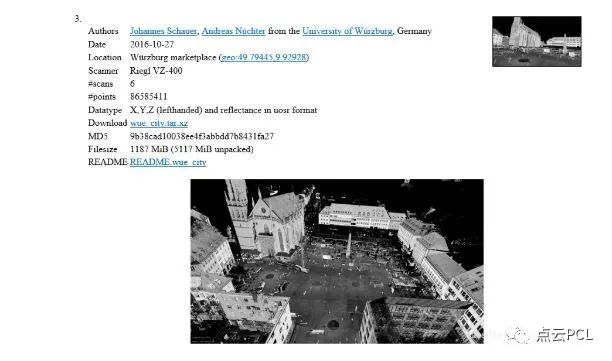
Robotic 3D Scan Repository
鏈接:http://kos.informatik.uni-osnabrueck.de/3Dscans/
這個數(shù)據(jù)集比較適合做SLAM研究,包含了大量的Riegl和Velodyne雷達數(shù)據(jù)。
下載1:OpenCV-Contrib擴展模塊中文版教程 在「小白學視覺」公眾號后臺回復:擴展模塊中文教程,即可下載全網(wǎng)第一份OpenCV擴展模塊教程中文版,涵蓋擴展模塊安裝、SFM算法、立體視覺、目標跟蹤、生物視覺、超分辨率處理等二十多章內(nèi)容。 下載2:Python視覺實戰(zhàn)項目52講 在「小白學視覺」公眾號后臺回復:Python視覺實戰(zhàn)項目,即可下載包括圖像分割、口罩檢測、車道線檢測、車輛計數(shù)、添加眼線、車牌識別、字符識別、情緒檢測、文本內(nèi)容提取、面部識別等31個視覺實戰(zhàn)項目,助力快速學校計算機視覺。 下載3:OpenCV實戰(zhàn)項目20講 在「小白學視覺」公眾號后臺回復:OpenCV實戰(zhàn)項目20講,即可下載含有20個基于OpenCV實現(xiàn)20個實戰(zhàn)項目,實現(xiàn)OpenCV學習進階。 交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動駕駛、計算攝影、檢測、分割、識別、醫(yī)學影像、GAN、算法競賽等微信群(以后會逐漸細分),請掃描下面微信號加群,備注:”昵稱+學校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會根據(jù)研究方向邀請進入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會請出群,謝謝理解~