
結(jié)構(gòu)光發(fā)展簡(jiǎn)史
來(lái)源:https://zhuanlan.zhihu.com/p/29971801
作者:許翔翔@知乎
■ 背景知識(shí)
針孔相機(jī)模型:射線方程
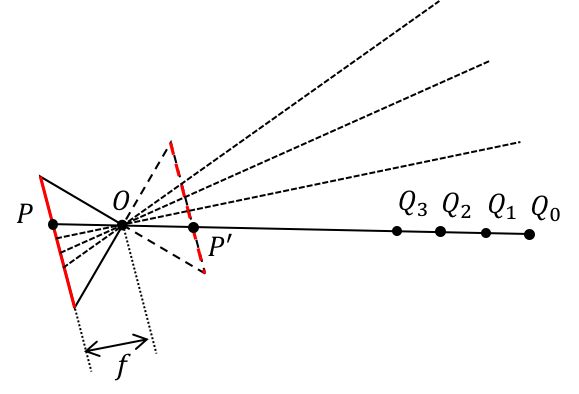
 點(diǎn),傳感器面為紅色實(shí)線, 點(diǎn)到傳感器面距離
點(diǎn),傳感器面為紅色實(shí)線, 點(diǎn)到傳感器面距離  。那么我們可以這樣描述成像的過程:三維空間中的
。那么我們可以這樣描述成像的過程:三維空間中的  點(diǎn)經(jīng)過光心 點(diǎn)在傳感器面上成像為
點(diǎn)經(jīng)過光心 點(diǎn)在傳感器面上成像為  點(diǎn),且 、 、 三點(diǎn)在一條直線上。針孔相機(jī)模型是一個(gè)三維空間(
點(diǎn),且 、 、 三點(diǎn)在一條直線上。針孔相機(jī)模型是一個(gè)三維空間(  點(diǎn)所在空間)到二維面( 點(diǎn)所在面)的變換,
點(diǎn)所在空間)到二維面( 點(diǎn)所在面)的變換,  線上的任意一點(diǎn)(如
線上的任意一點(diǎn)(如  、
、 、
、 )所成的像都是 點(diǎn),因此如果只知道 點(diǎn),我們是無(wú)法反推出具體哪一個(gè) 點(diǎn)點(diǎn)亮了 點(diǎn),我們只能說點(diǎn)亮 點(diǎn)的點(diǎn)一定在射線
)所成的像都是 點(diǎn),因此如果只知道 點(diǎn),我們是無(wú)法反推出具體哪一個(gè) 點(diǎn)點(diǎn)亮了 點(diǎn),我們只能說點(diǎn)亮 點(diǎn)的點(diǎn)一定在射線  上。所以針孔相機(jī)模型本質(zhì)上是射線方程,也就是說知道了CCD上的點(diǎn),就可以得到一條射線。
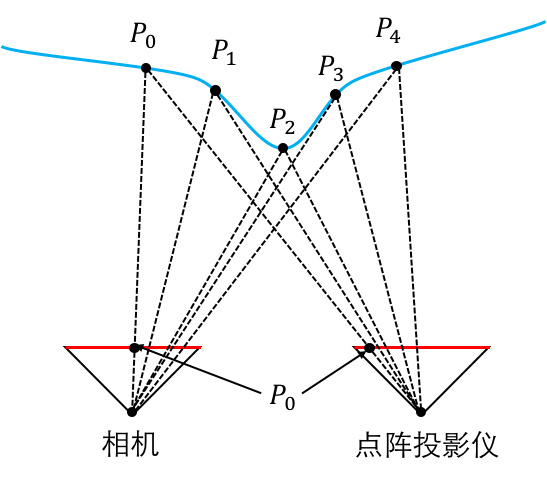
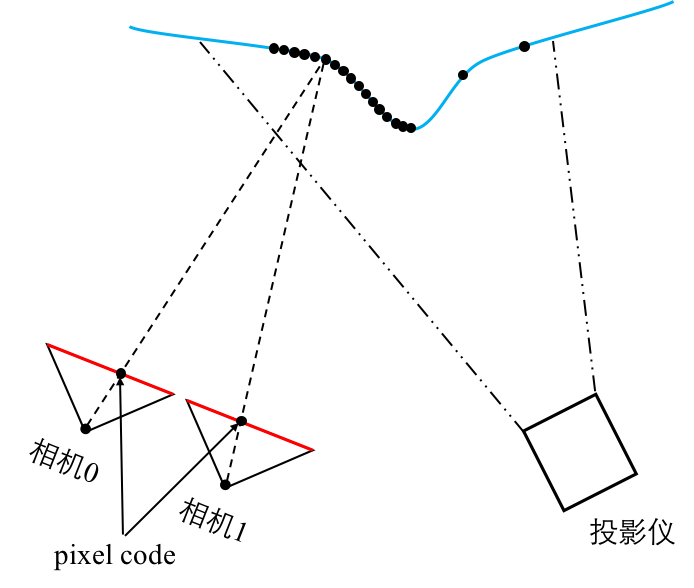
上。所以針孔相機(jī)模型本質(zhì)上是射線方程,也就是說知道了CCD上的點(diǎn),就可以得到一條射線。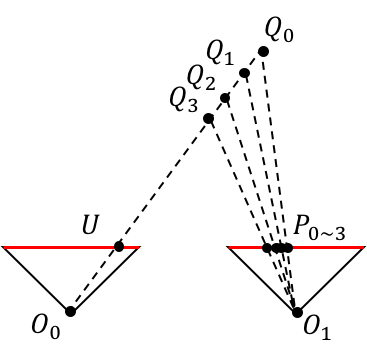 點(diǎn)點(diǎn)亮了相機(jī)0上的
點(diǎn)點(diǎn)亮了相機(jī)0上的  點(diǎn),我們引入了另一個(gè)相機(jī),通過相機(jī)1,我們可以得到 點(diǎn)在相機(jī)1中的像點(diǎn) ,聯(lián)立
點(diǎn),我們引入了另一個(gè)相機(jī),通過相機(jī)1,我們可以得到 點(diǎn)在相機(jī)1中的像點(diǎn) ,聯(lián)立  和
和  我們就可以唯一的得到空間中 點(diǎn),上圖表達(dá)了這個(gè)關(guān)系。
我們就可以唯一的得到空間中 點(diǎn),上圖表達(dá)了這個(gè)關(guān)系。■ 被動(dòng)測(cè)距

■ 主動(dòng)結(jié)構(gòu)光
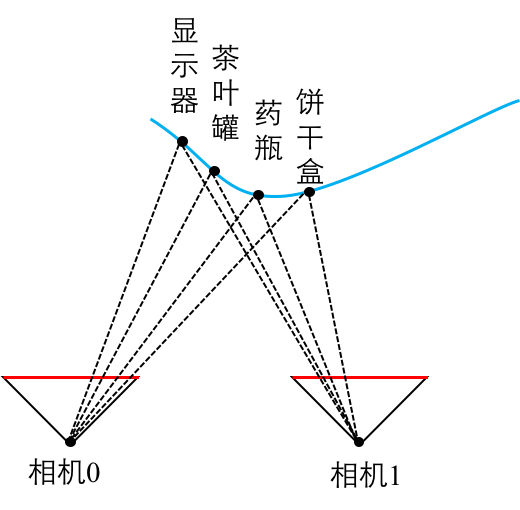
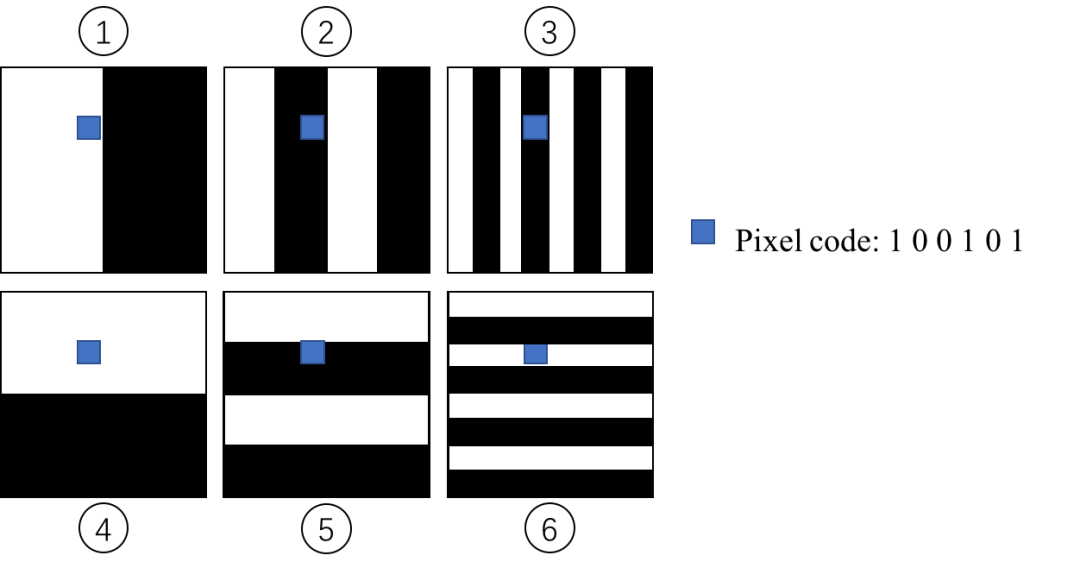
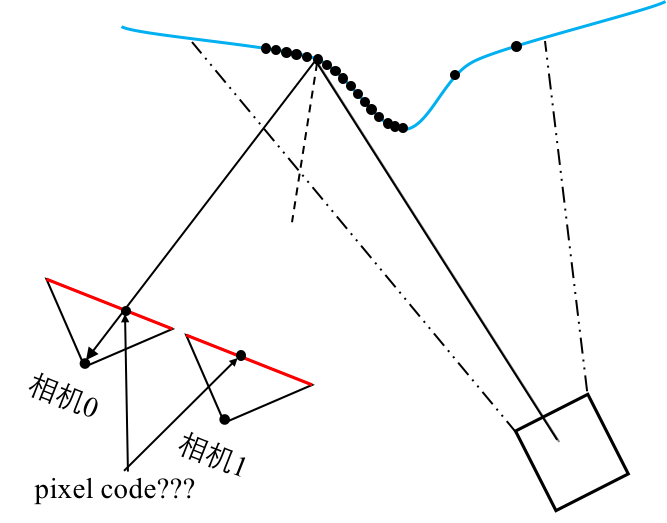
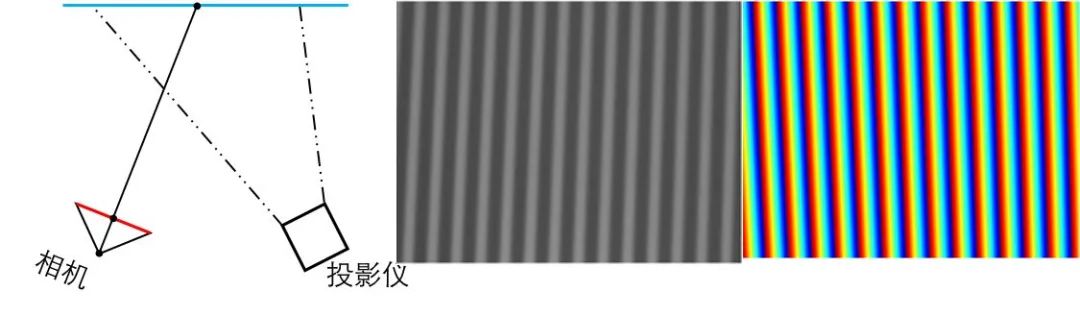
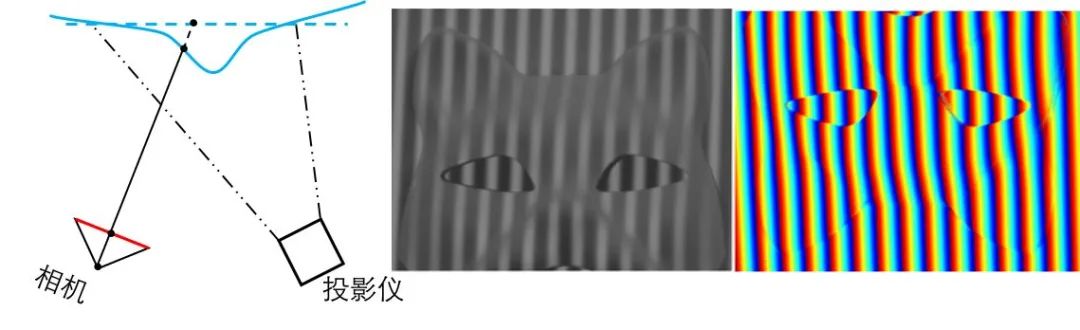
 點(diǎn)的投影點(diǎn),也可以在相機(jī)CCD面上找到被 點(diǎn)亮的成像點(diǎn)。上面的草圖中,一共有五個(gè)投影點(diǎn),而相機(jī)拍到的五個(gè)投影點(diǎn),會(huì)因?yàn)槊嫘蔚拇嬖诟淖兿噜弮牲c(diǎn)之間的距離卻不會(huì)因?yàn)槊嫘蔚拇嬖趯?dǎo)致五個(gè)投影點(diǎn)相對(duì)順序的改變,因此我們說相機(jī)是通過拓?fù)渚W(wǎng)格的標(biāo)號(hào)來(lái)確定CCD面上點(diǎn)和投影儀投影面上點(diǎn)的一一對(duì)應(yīng)關(guān)系。
點(diǎn)的投影點(diǎn),也可以在相機(jī)CCD面上找到被 點(diǎn)亮的成像點(diǎn)。上面的草圖中,一共有五個(gè)投影點(diǎn),而相機(jī)拍到的五個(gè)投影點(diǎn),會(huì)因?yàn)槊嫘蔚拇嬖诟淖兿噜弮牲c(diǎn)之間的距離卻不會(huì)因?yàn)槊嫘蔚拇嬖趯?dǎo)致五個(gè)投影點(diǎn)相對(duì)順序的改變,因此我們說相機(jī)是通過拓?fù)渚W(wǎng)格的標(biāo)號(hào)來(lái)確定CCD面上點(diǎn)和投影儀投影面上點(diǎn)的一一對(duì)應(yīng)關(guān)系。
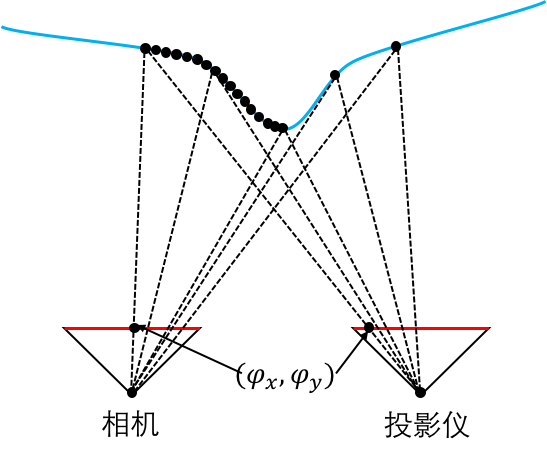
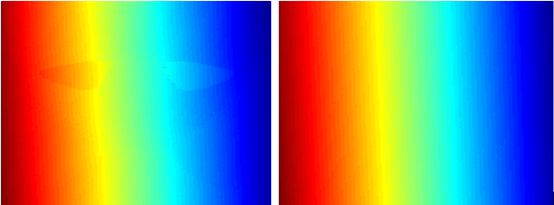
 作為傳遞不變量。之所以用相位分布作為傳遞不變量,是因?yàn)橄辔环植际怯擅嫘蔚母叨确植贾苯記Q定的。
作為傳遞不變量。之所以用相位分布作為傳遞不變量,是因?yàn)橄辔环植际怯擅嫘蔚母叨确植贾苯記Q定的。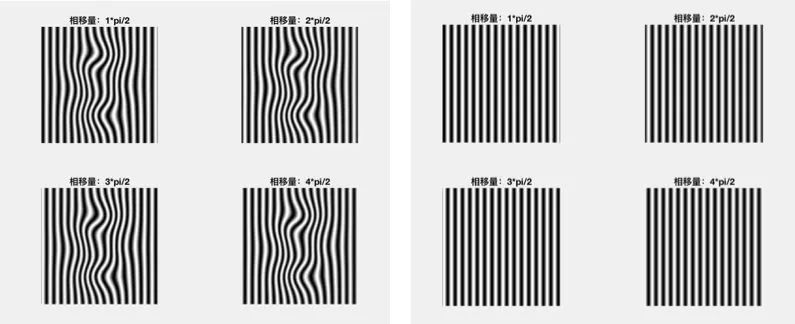
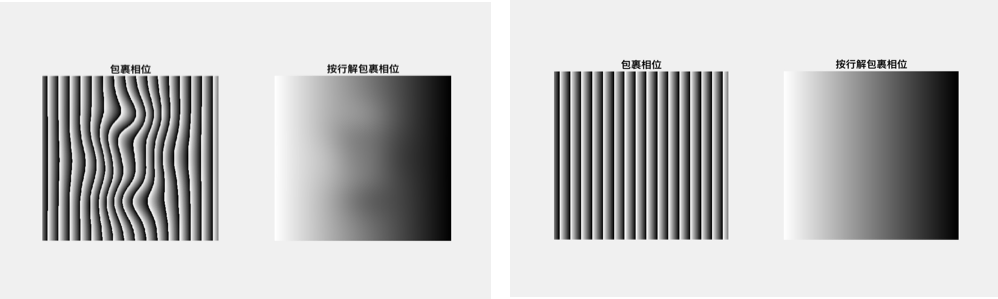
 CCD面像素標(biāo)號(hào)」的對(duì)應(yīng)關(guān)系,實(shí)現(xiàn)了像素級(jí)點(diǎn)對(duì)點(diǎn)匹配。
CCD面像素標(biāo)號(hào)」的對(duì)應(yīng)關(guān)系,實(shí)現(xiàn)了像素級(jí)點(diǎn)對(duì)點(diǎn)匹配。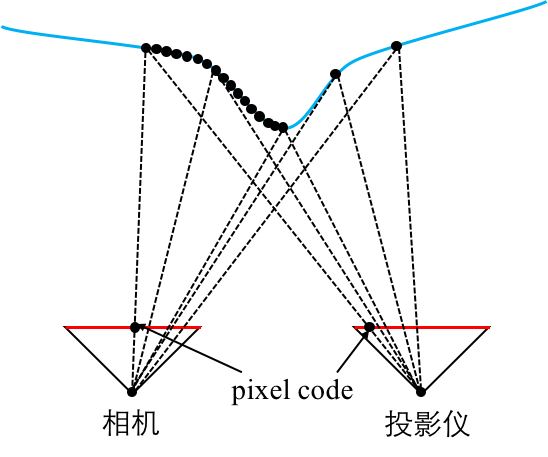


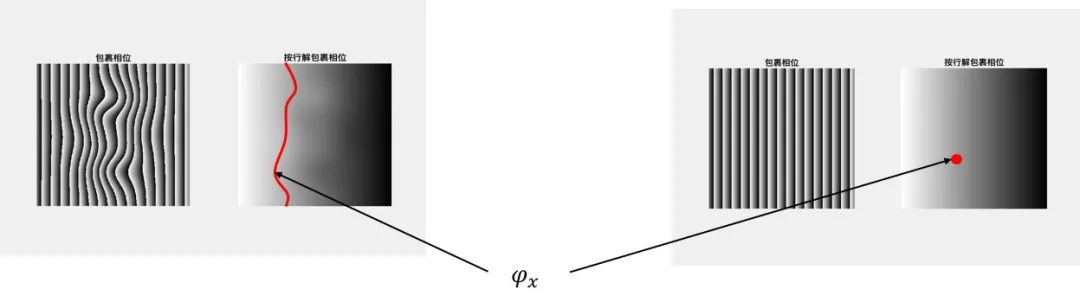
 是在
是在  處待測(cè)面與參考面的高度差,
處待測(cè)面與參考面的高度差,  是對(duì)應(yīng)的待測(cè)面相位分布和參考面相位分布的差,
是對(duì)應(yīng)的待測(cè)面相位分布和參考面相位分布的差,  ,
,  和
和  是標(biāo)定系數(shù)。 、 、 需要采用別的手段進(jìn)行標(biāo)定。由于標(biāo)定好「相位——高度」的映射,因此PMP不需要在另一個(gè)方向測(cè)量相位分布。為了解決PMP中方程欠定的問題,需要引入?yún)⒖济婧推渌臉?biāo)定手段,肯定有讀者會(huì)問這相對(duì)于之前的結(jié)構(gòu)光好在哪里呢?其實(shí)方法沒有好壞之分只有適合用在哪里的區(qū)別。雖然PMP增加了標(biāo)定和設(shè)備的復(fù)雜性,但是好在這些工作只要做一次就可以,非常適用于有基準(zhǔn)面的測(cè)量,比如電路板的三維測(cè)量等等。
是標(biāo)定系數(shù)。 、 、 需要采用別的手段進(jìn)行標(biāo)定。由于標(biāo)定好「相位——高度」的映射,因此PMP不需要在另一個(gè)方向測(cè)量相位分布。為了解決PMP中方程欠定的問題,需要引入?yún)⒖济婧推渌臉?biāo)定手段,肯定有讀者會(huì)問這相對(duì)于之前的結(jié)構(gòu)光好在哪里呢?其實(shí)方法沒有好壞之分只有適合用在哪里的區(qū)別。雖然PMP增加了標(biāo)定和設(shè)備的復(fù)雜性,但是好在這些工作只要做一次就可以,非常適用于有基準(zhǔn)面的測(cè)量,比如電路板的三維測(cè)量等等。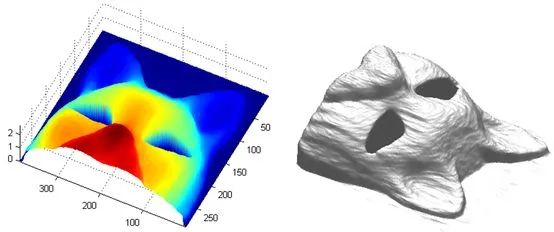
 End
End
聲明:部分內(nèi)容來(lái)源于網(wǎng)絡(luò),僅供讀者學(xué)術(shù)交流之目的,文章版權(quán)歸原作者所有。如有不妥,請(qǐng)聯(lián)系刪除。

評(píng)論
圖片
表情