
一文看盡 Facebook 3D視覺技術(shù)研究進展
點擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時間送達
本文轉(zhuǎn)載自:機器之心

選自Facebook AI
作者:Georgia Gkioxari、Shubham Tulsiani、David Novotny
參與:魔王
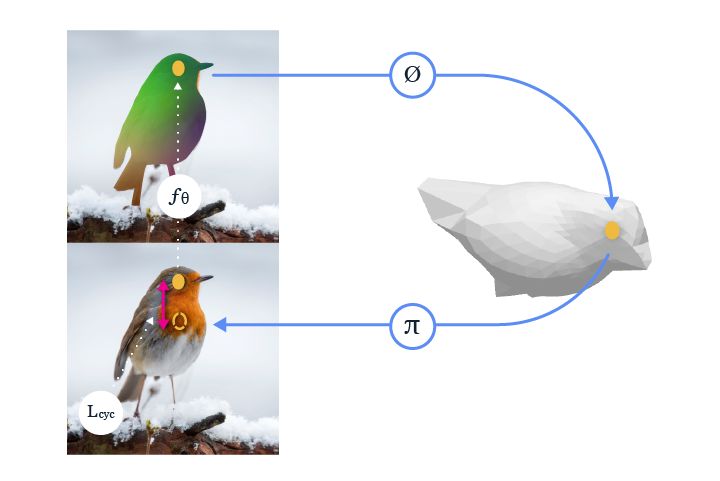
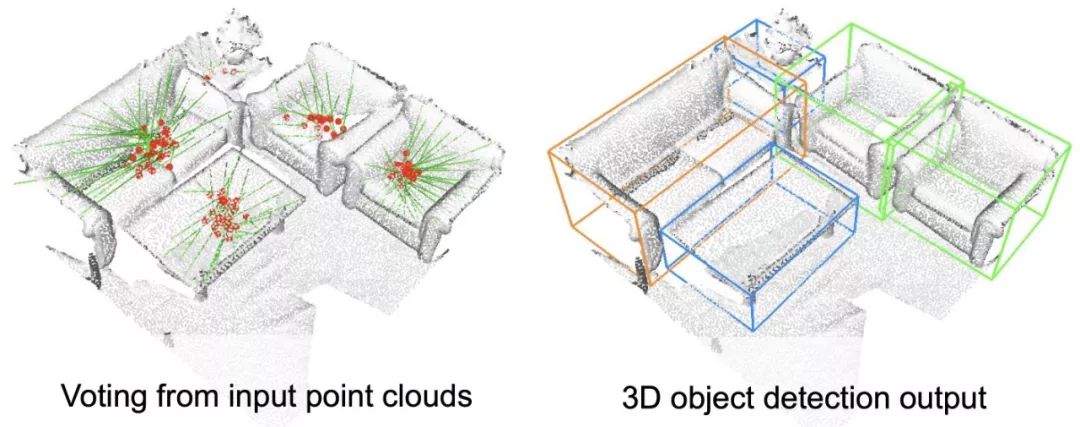
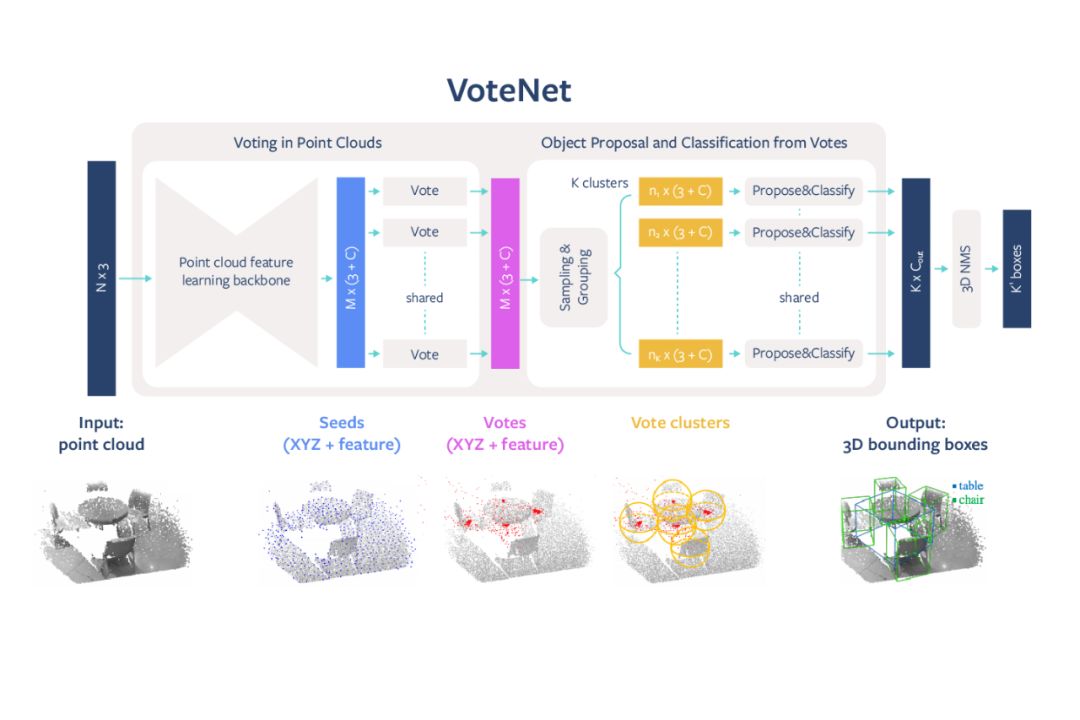
Facebook 的博客詳細介紹了其在 3D 內(nèi)容理解領(lǐng)域的研究進展。





原文鏈接:https://ai.facebook.com/blog/pushing-state-of-the-art-in-3d-content-understanding/
下載1:OpenCV-Contrib擴展模塊中文版教程 在「小白學(xué)視覺」公眾號后臺回復(fù):擴展模塊中文教程,即可下載全網(wǎng)第一份OpenCV擴展模塊教程中文版,涵蓋擴展模塊安裝、SFM算法、立體視覺、目標(biāo)跟蹤、生物視覺、超分辨率處理等二十多章內(nèi)容。 下載2:Python視覺實戰(zhàn)項目52講 在「小白學(xué)視覺」公眾號后臺回復(fù):Python視覺實戰(zhàn)項目,即可下載包括圖像分割、口罩檢測、車道線檢測、車輛計數(shù)、添加眼線、車牌識別、字符識別、情緒檢測、文本內(nèi)容提取、面部識別等31個視覺實戰(zhàn)項目,助力快速學(xué)校計算機視覺。 下載3:OpenCV實戰(zhàn)項目20講 在「小白學(xué)視覺」公眾號后臺回復(fù):OpenCV實戰(zhàn)項目20講,即可下載含有20個基于OpenCV實現(xiàn)20個實戰(zhàn)項目,實現(xiàn)OpenCV學(xué)習(xí)進階。 交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動駕駛、計算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會逐漸細分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會根據(jù)研究方向邀請進入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會請出群,謝謝理解~
評論
圖片
表情