
【機(jī)器視覺】3D抓取—基于模板匹配
點(diǎn)擊下方卡片,關(guān)注“新機(jī)器視覺”公眾號(hào)
視覺/圖像重磅干貨,第一時(shí)間送達(dá)
轉(zhuǎn)自|牙牙的無為生活
基于模板匹配方法
已知物體模型,從不同方向提取RGBD特征,處理生成模板與實(shí)際圖像每個(gè)位置進(jìn)行匹配,匹配成功得到目標(biāo)的位姿信息。
2011Linemod經(jīng)典鼻祖論文:Multimodaltemplates for real-time detection of texture-less objects in heavily clutteredscenes(Linemod)
2012改進(jìn)Linemod:Gradient Response Maps for Real-Time Detection of Texture-Less Objects
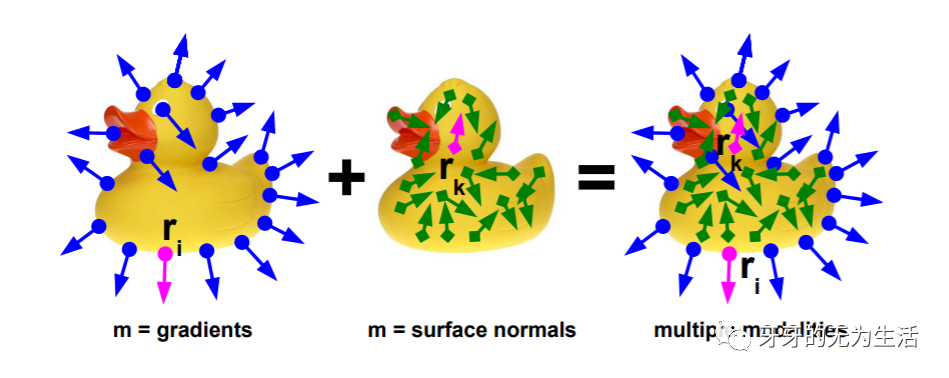
左:可辨別的圖像梯度主要在輪廓上找到。梯度位置粉紅色顯示
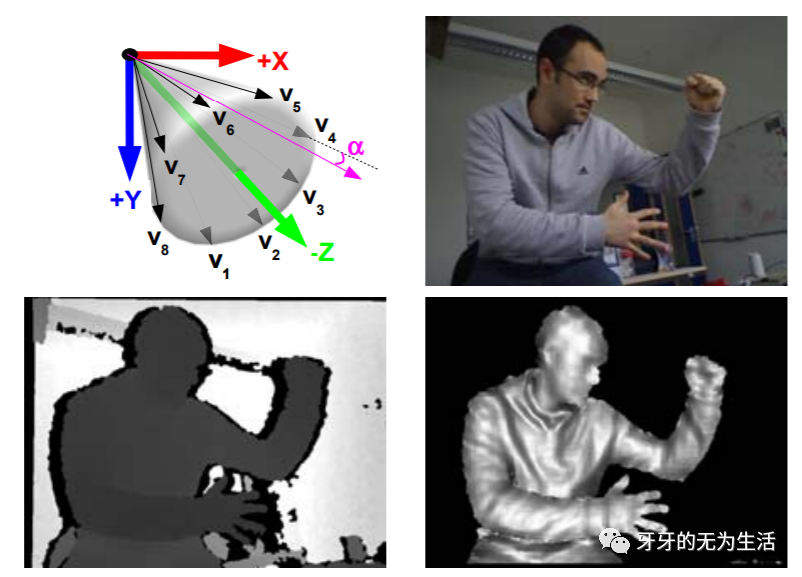
中:深度傳感器獲取的表面法向量
右:2D圖像梯度和3D表面法線的組合->增加魯棒性
視覺提示的互補(bǔ)性:梯度通常在物體輪廓上找到,而在物體內(nèi)部找到曲面法線
研究方向與問題:復(fù)雜背景下3D物體的實(shí)時(shí)檢測(cè)與定位
依據(jù):采用彩色圖像的梯度信息結(jié)合物體表面的法向特征作為模板匹配
算法場(chǎng)景:復(fù)雜場(chǎng)景、無紋理、多模板
應(yīng)用:opencv封裝((參考2中有函數(shù)解釋)),基于ros的object recognition kitchen中有配套的模型生成圖像的程序、ICP后處理的教程跟代碼
算法流程:
(1)概念性
一個(gè)模板是一個(gè)特征點(diǎn)序列(多模態(tài)時(shí)為多個(gè)序列),特征點(diǎn)彼此不能太近且要有足夠的代表性。
輸入RGBD數(shù)據(jù)
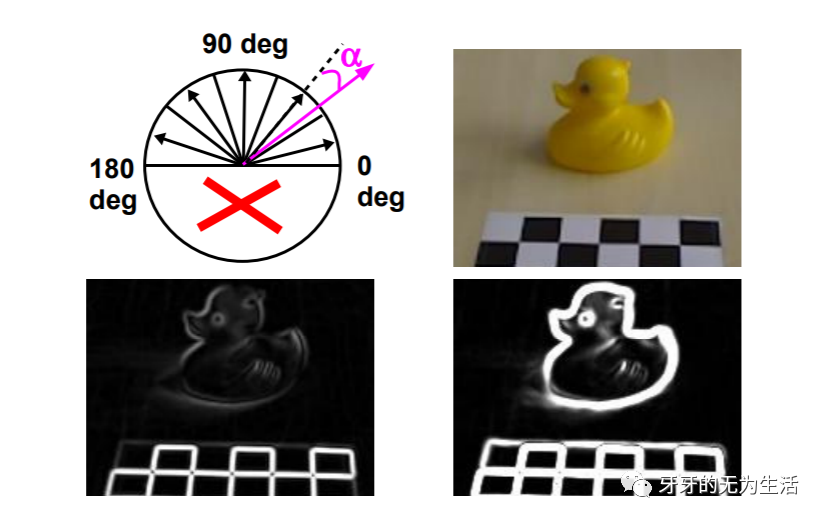
(2)計(jì)算梯度方向
以彩色梯度為例,先進(jìn)行7*7的高斯模糊,然后利用Sobel算子計(jì)算梯度,繼而在每個(gè)像素點(diǎn)求解出了梯度方向以及幅值,只有超過一定閾值的梯度才會(huì)被保留;
接著在3*3的領(lǐng)域內(nèi)統(tǒng)計(jì)梯度的方向,數(shù)量超過5的梯度方向才會(huì)被采用;
此處梯度方向都是無符號(hào)的,只取上一半,Opencv實(shí)現(xiàn)的代碼里分為8個(gè)方向(量化為5)。這種提取特征的方式對(duì)于梯度起到了主成分提取和放大的效果。
經(jīng)過訓(xùn)練生成文件信息。
(3)方向擴(kuò)散
對(duì)被搜索圖像(原圖)也要進(jìn)行梯度的計(jì)算,并且對(duì)梯度的方向做方向的拓展。
繼而利用模板進(jìn)行滑窗匹配時(shí)就有了一定的容錯(cuò)度,匹配容錯(cuò)。
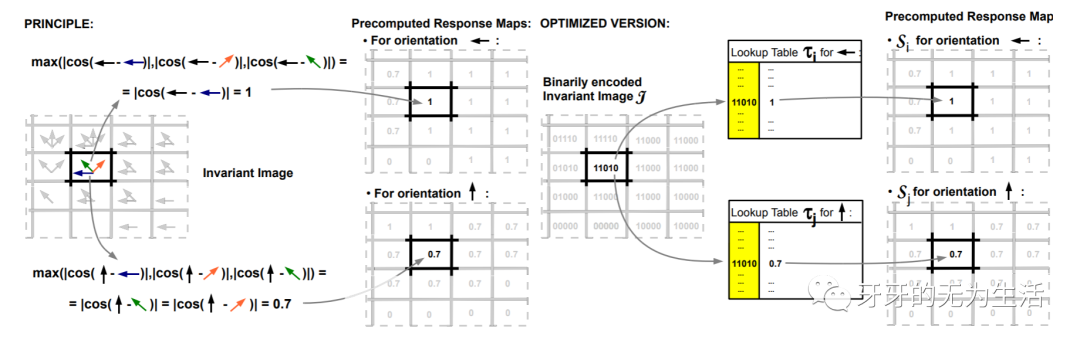
(4)預(yù)處理響應(yīng)圖
制作查找表,算法匹配速度快;
針對(duì)n(=8)個(gè)方向和方向擴(kuò)散圖逐個(gè)像素進(jìn)行匹配,匹配的結(jié)果是距離最近方向角度的余弦值;
值得注意的是,雖然這里有八個(gè)方向,但是夾角只有五種情況(算的直線夾角而非射線),故而匹配的結(jié)果只有五種;
響應(yīng)圖是被搜索圖(原圖)各個(gè)位置下對(duì)應(yīng)擴(kuò)展方向的二進(jìn)制表示,模板圖像共有5個(gè)方向,那么相應(yīng)生成5張響應(yīng)圖Response Maps,利用模板進(jìn)行匹配,可以直接調(diào)用對(duì)應(yīng)方向在對(duì)應(yīng)像素的結(jié)果,避免了滑窗時(shí)重復(fù)的計(jì)算。
(5)線性存儲(chǔ)
避免重復(fù)計(jì)算,加速計(jì)算

(6)擴(kuò)展深度圖
實(shí)際應(yīng)用中的問題
遮擋場(chǎng)景無法處理
改進(jìn)與優(yōu)化
linemod存在兩個(gè)問題,一個(gè)對(duì)尺度變化敏感,一個(gè)遮擋情況下效果變差。【3】改進(jìn)詳見6D pose(見方法3)。
參考
【1】https://blog.csdn.net/zmdsjtu/article/details/79933822
【2】https://blog.csdn.net/qq_36537774/article/details/89354339?utm_medium=distribute.pc_relevant.none-task-blog-2~default~baidujs_baidulandingword~default-0.control&spm=1001.2101.3001.4242
【3】https://zhuanlan.zhihu.com/p/35683990
【4】https://blog.csdn.net/ALZFterry/article/details/108694869
—版權(quán)聲明—
僅用于學(xué)術(shù)分享,版權(quán)屬于原作者。
若有侵權(quán),請(qǐng)聯(lián)系微信號(hào):yiyang-sy 刪除或修改!