
SLAM全棧+三維重建全棧系統(tǒng)學(xué)習(xí)路線!
三維重建全棧學(xué)習(xí)系列包括:《徹底搞透視覺(jué)三維重建:原理剖析、代碼講解及優(yōu)化改進(jìn)》、《國(guó)內(nèi)首個(gè)基于結(jié)構(gòu)光投影三維重建系列視頻課程》、《國(guó)內(nèi)首個(gè)面向工業(yè)級(jí)實(shí)戰(zhàn)的點(diǎn)云處理課程》、《相機(jī)標(biāo)定從入門(mén)到精通:基本原理與實(shí)戰(zhàn)》四門(mén)課程。
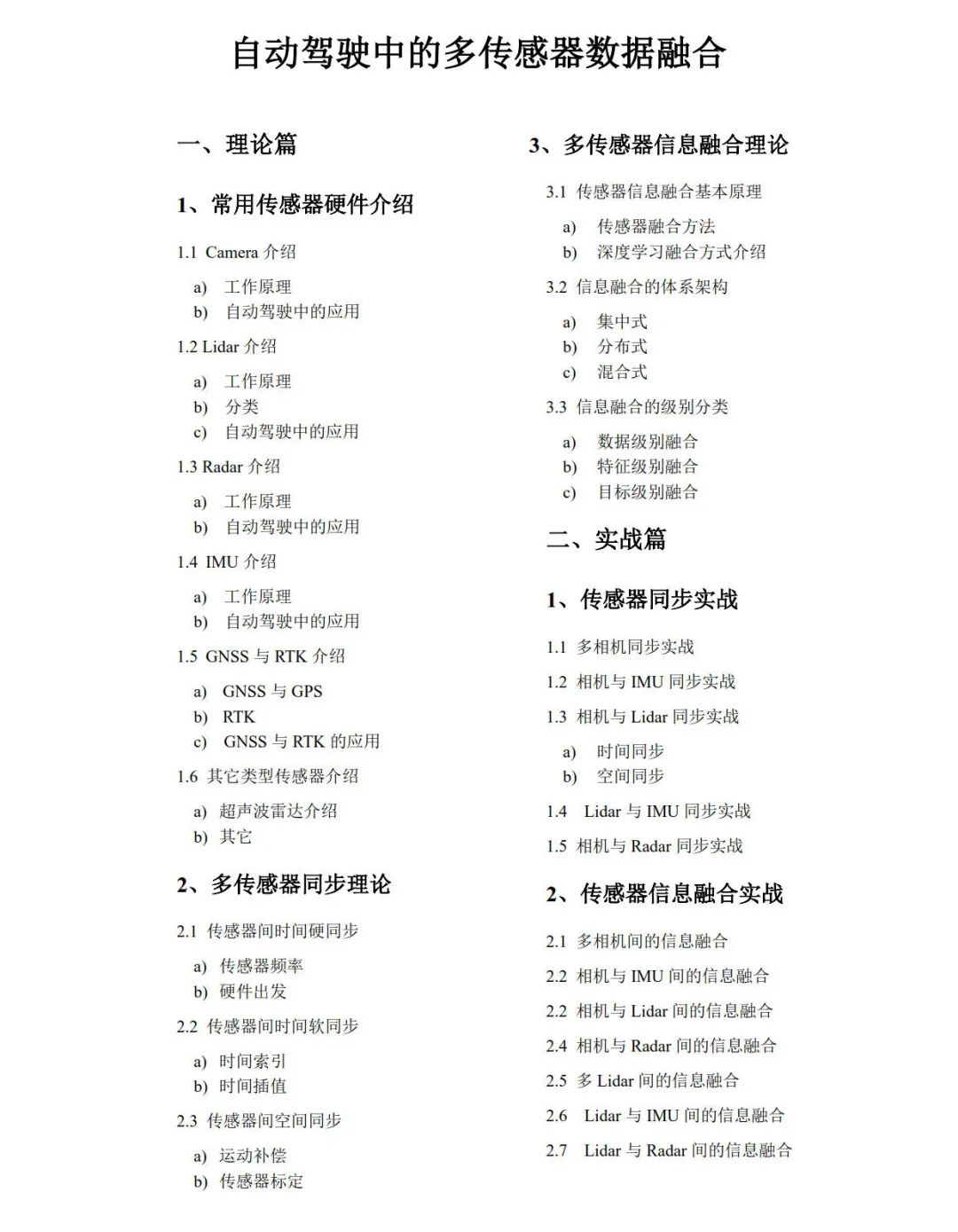
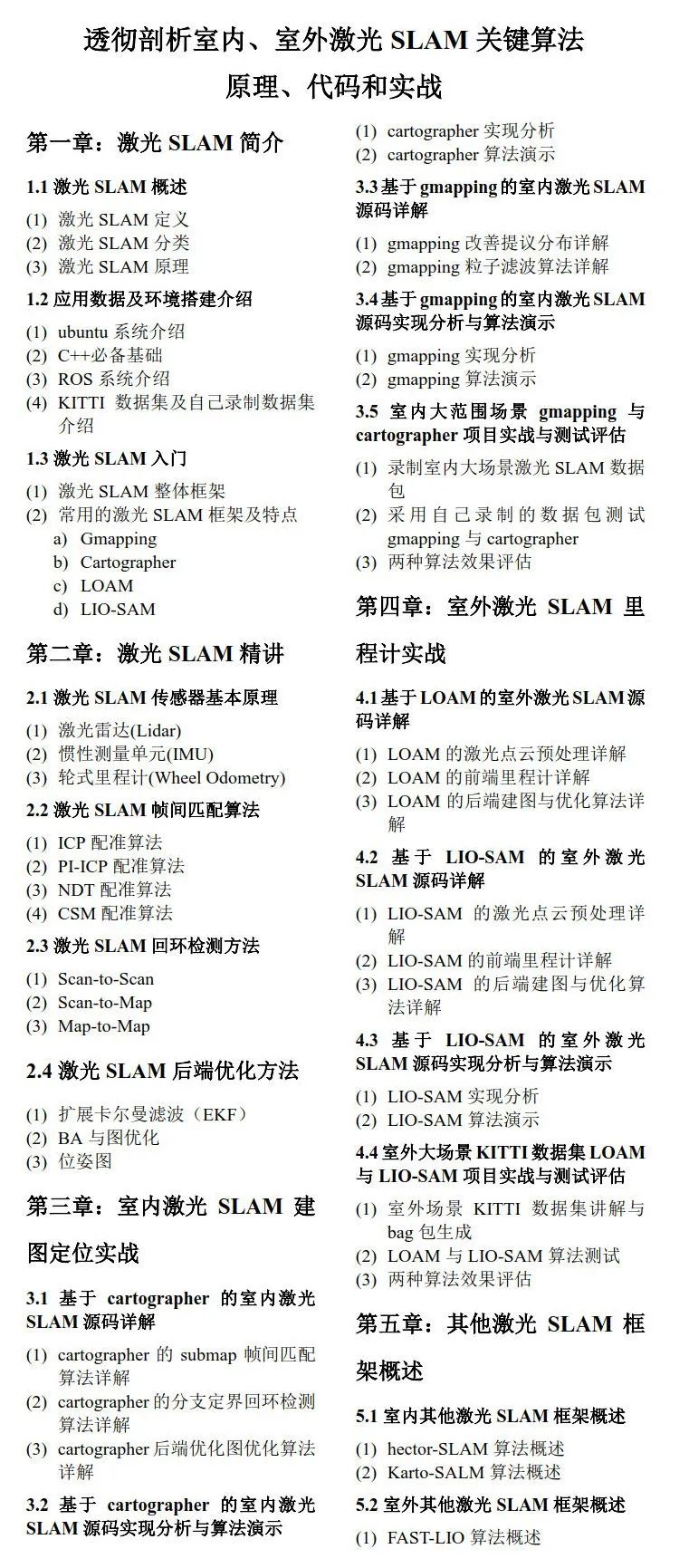
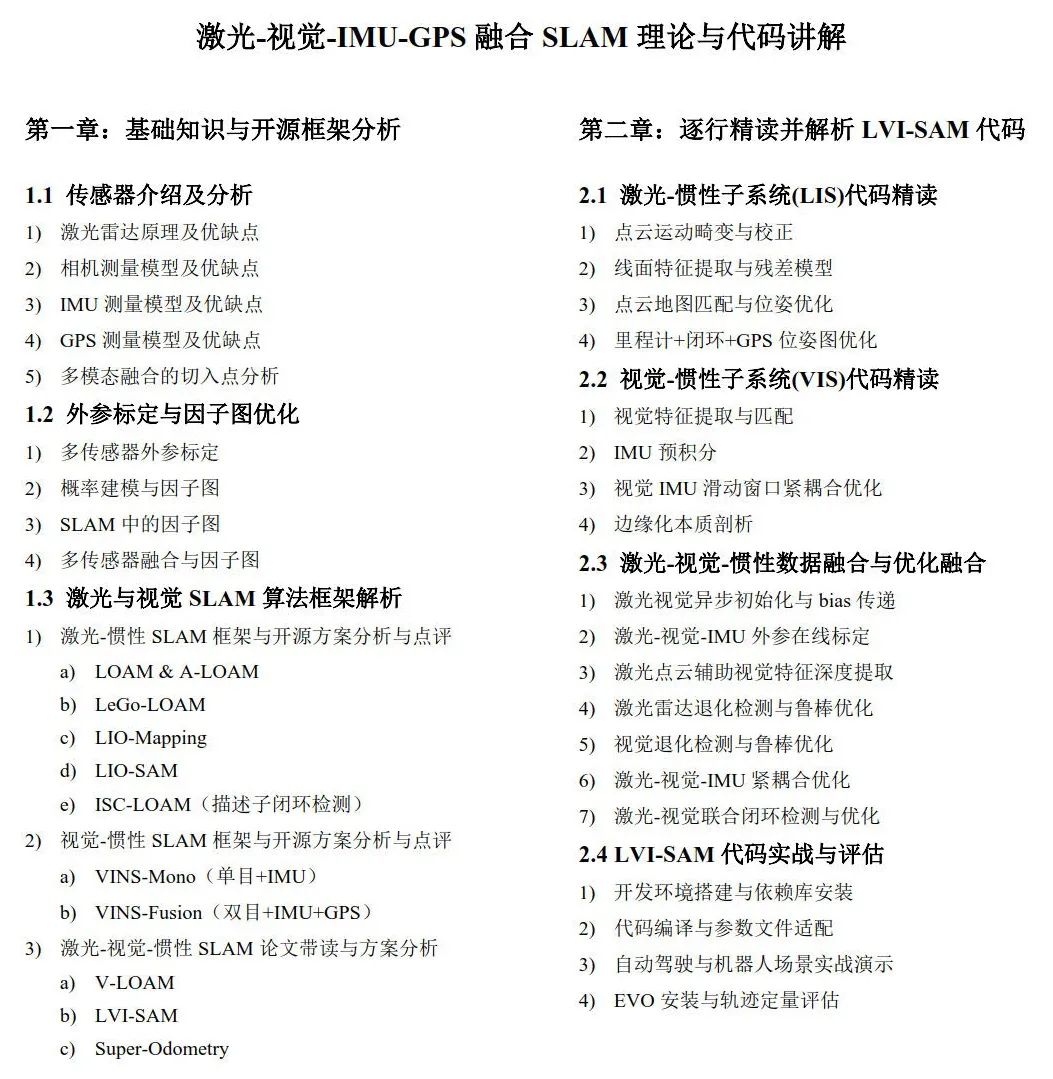
SLAM全棧學(xué)習(xí)系列課程大綱


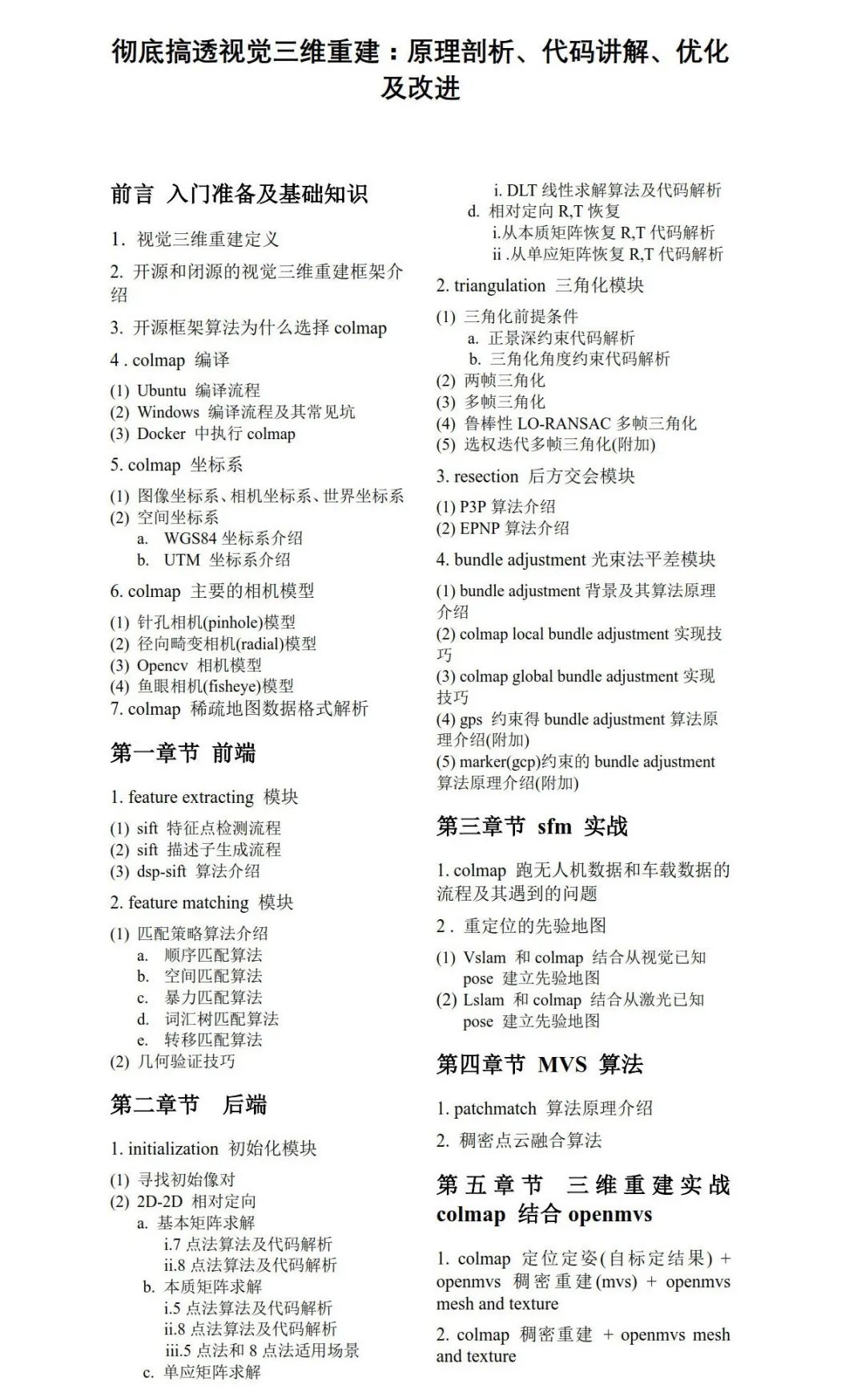
三維重建全棧學(xué)習(xí)系列課程大綱

國(guó)內(nèi)首個(gè)基于結(jié)構(gòu)光投影三維重建系列視頻課程
緒論; 基于格雷碼結(jié)構(gòu)光投影的三維傳感技術(shù); 基于格雷碼結(jié)合相移技術(shù)的動(dòng)態(tài)三維傳感方法: 幾種時(shí)間相位展開(kāi)方法的基本原理及方法比較; 雙目立體匹配三維重建方法; 結(jié)構(gòu)光測(cè)量系統(tǒng)的標(biāo)定; 投影儀非線性校正; 高反射物體表面測(cè)量方法; 實(shí)時(shí)結(jié)構(gòu)光三維面形測(cè)量方法; 高速結(jié)構(gòu)光三維面形測(cè)量方法; 全局效應(yīng)性下的結(jié)構(gòu)光三維重建方法: 結(jié)構(gòu)光方法新應(yīng)用; 深度學(xué)習(xí)在結(jié)構(gòu)光三維重建中的應(yīng)用。
相機(jī)標(biāo)定從入門(mén)到精通:基本原理與實(shí)戰(zhàn)
相機(jī)模型
張正友標(biāo)定簡(jiǎn)介
標(biāo)定改進(jìn)方法
實(shí)際標(biāo)定操作技術(shù)全面詳解
評(píng)論
圖片
表情