
如何使用TensorFlow構(gòu)建機(jī)器學(xué)習(xí)模型
點(diǎn)擊下方卡片,關(guān)注“新機(jī)器視覺(jué)”公眾號(hào)
視覺(jué)/圖像重磅干貨,第一時(shí)間送達(dá)
在這篇文章中,我將逐步講解如何使用 TensorFlow 創(chuàng)建一個(gè)簡(jiǎn)單的機(jī)器學(xué)習(xí)模型。
TensorFlow 是一個(gè)由谷歌開(kāi)發(fā)的庫(kù),并在 2015 年開(kāi)源,它能使構(gòu)建和訓(xùn)練機(jī)器學(xué)習(xí)模型變得簡(jiǎn)單。
我們接下來(lái)要建立的模型將能夠自動(dòng)將公里轉(zhuǎn)換為英里,在本例中,我們將創(chuàng)建一個(gè)能夠?qū)W習(xí)如何進(jìn)行這種轉(zhuǎn)換的模型。我們將向這個(gè)模型提供一個(gè) CSV (https://en.wikipedia.org/wiki/Comma-separated_values)文件作為輸入,其中有 29 組已經(jīng)執(zhí)行過(guò)的公里和英里之間的轉(zhuǎn)換,基于這些數(shù)據(jù),我們的模型將學(xué)會(huì)自動(dòng)進(jìn)行這種轉(zhuǎn)換。
我們將使用有監(jiān)督學(xué)習(xí)算法,因?yàn)槲覀冎罃?shù)據(jù)的輸入和輸出結(jié)果。并使用 Python 作為編程語(yǔ)言。Python 提供了一系列與機(jī)器學(xué)習(xí)相關(guān)的方便的庫(kù)和工具。本例中所有的步驟都是使用 Google Colab 執(zhí)行的。Google Colab 允許我們?cè)跒g覽器上零配置地編寫和執(zhí)行 Python 代碼。
我們首先導(dǎo)入在我們的例子中將要使用到的庫(kù)。
import tensorflow as tf
import pandas as pd
import seaborn as sns
import matplotlib.pyplot as plt
我們將導(dǎo)入 TensorFlow 來(lái)創(chuàng)建我們的機(jī)器學(xué)習(xí)模型。
我們還將導(dǎo)入 Pandas 庫(kù)來(lái)讀取包含有公里和英里轉(zhuǎn)換數(shù)據(jù)的 CSV 文件。
最后,我們將導(dǎo)入 Seaborn 和 Matlotlib 庫(kù)繪制不同的結(jié)果。
我們將含有逗號(hào)分隔的值的文件(Kilometres-miles.csv)讀取到我們的數(shù)據(jù)幀中。這個(gè)文件包含一系列公里和英里值的轉(zhuǎn)換。我們將使用這些數(shù)據(jù)幀來(lái)訓(xùn)練我們的模型。你可以在這個(gè)鏈接(https://drive.google.com/file/d/1m63pJA-zUAA12XOCCBt3Aik9fnjrj_8s/view?usp=sharing)下載這個(gè)文件。
要從 Google Colab 讀取文件,你可以使用不同的方法。在本例中,我直接將 CSV 文件上傳到我的 Google Colab 上的 sample_data 文件夾中,但你可以從一個(gè) URL 中讀取文件(比如,從 GitHub)。
上傳到 Google Colab 的問(wèn)題是,數(shù)據(jù)會(huì)在運(yùn)行時(shí)重啟時(shí)丟失。
數(shù)據(jù)幀是二維的大小可變的并且各種各樣的表格數(shù)據(jù)。
df = pd.read_csv('/content/sample_data/Kilometres-miles.csv')
df.info
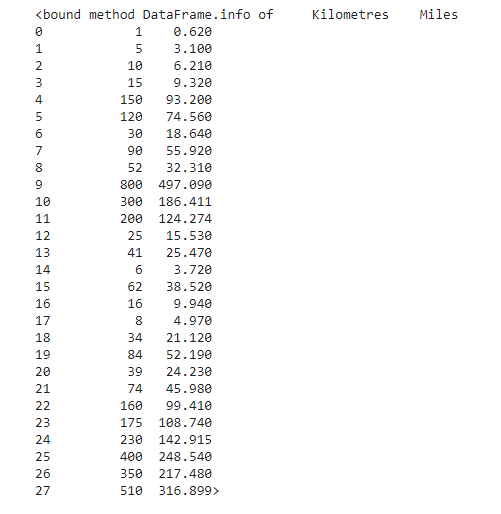
示例數(shù)據(jù)信息
我們將“searborn”庫(kù)的“scatterplot”導(dǎo)入并命名為“sns”,然后使用這個(gè)庫(kù)來(lái)繪制上述圖形。它顯示了 X(公里)和 Y(英里)對(duì)應(yīng)關(guān)系的圖形化表示。
print("Painting the correlations")
#Once we load seaborn into the session, everytime a matplotlib plot is executed, seaborn's default customizations are added
sns.scatterplot(df['Kilometres'], df['Miles'])
plt.show()
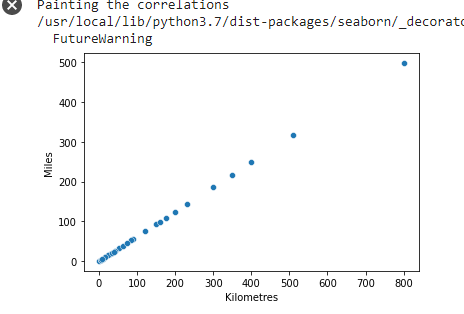
公里和英里的相關(guān)性
我們定義數(shù)據(jù)幀的輸入和輸出來(lái)訓(xùn)練模型:
X(公里)是輸入,Y(英里)是輸出。
print("Define input(X) and output(Y) variables")
X_train=df['Kilometres']
y_train=df['Miles']現(xiàn)在,讓我們使用“keras.Sequential”方法來(lái)創(chuàng)建一個(gè)神經(jīng)網(wǎng)絡(luò),其中依次添加“l(fā)ayers”。每一個(gè)層(layer)都具有逐步提取輸入數(shù)據(jù)以獲得所需輸出的功能。Keras 是一個(gè)用 Python 寫的庫(kù),我們創(chuàng)建神經(jīng)網(wǎng)絡(luò)并使用不同的機(jī)器學(xué)習(xí)框架,例如 TensorFlow。
接下來(lái),我們將使用“add”方法向模型添加一個(gè)層。
print("Creating the model")
model = tf.keras.Sequential()
model.add(tf.keras.layers.Dense(units=1,input_shape=[1]))
在訓(xùn)練我們的模型之前,我們將在編譯步驟中添加一些額外設(shè)置。
我們將設(shè)置一個(gè)優(yōu)化器和損失函數(shù),它們會(huì)測(cè)量我們的模型的準(zhǔn)確性。Adam 優(yōu)化是一種基于第一次和第二次矩的自適應(yīng)預(yù)算的隨機(jī)梯度下降算法。
為此,我們將使用基于平均方差的損失函數(shù),它測(cè)量了我們預(yù)測(cè)的平均方差。
我們的模型的目標(biāo)是最小化這個(gè)函數(shù)。
print("Compiling the model")
model.compile(optimizer=tf.keras.optimizers.Adam(1), loss='mean_squared_error')我們將使用“擬合(fit)”方法來(lái)訓(xùn)練我們的模型。首先,我們傳入獨(dú)立變量或輸入變量(X-Kilometers)和目標(biāo)變量(Y-Miles)。
另一方面,我們預(yù)測(cè) epoch 的數(shù)值。在本例中,epoch 值是 250。一個(gè) epoch 就是遍歷一遍所提供的完整的 X 和 Y 數(shù)據(jù)。
如果 epoch 的數(shù)值越小,誤差就會(huì)越大;反過(guò)來(lái),epoch 的數(shù)值越大,則誤差就會(huì)越小。
如果 epoch 的數(shù)值越大,算法的執(zhí)行速度就會(huì)越慢。
print ("Training the model")
epochs_hist = model.fit(X_train, y_train, epochs = 250)
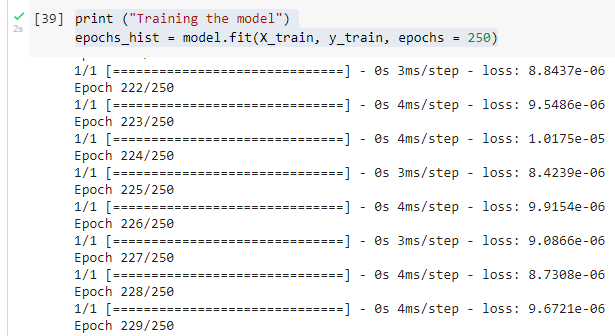
訓(xùn)練模型的控制臺(tái)
現(xiàn)在,我們?cè)u(píng)估創(chuàng)建的模型,在該模型中,我們可以觀察到損失(Training_loss)隨著執(zhí)行的遍歷次數(shù)(epoch)的增多而減少,如果訓(xùn)練集數(shù)據(jù)有意義并且是一個(gè)足夠大的組,這是合乎邏輯的。
print("Evaluating the model")
print(epochs_hist.history.keys())
#graph
plt.plot(epochs_hist.history['loss'])
plt.title('Evolution of the error associated with the model')
plt.xlabel('Epoch')
plt.ylabel('Training Loss')
plt.legend('Training Loss')
plt.show()
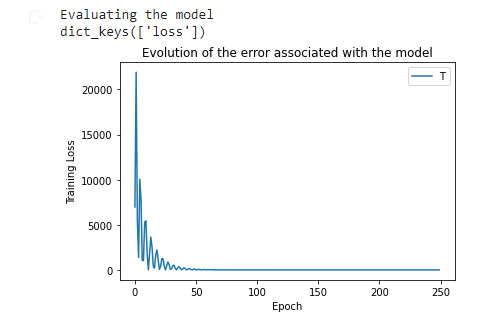
從圖中我們可以看出,用 250 次訓(xùn)練模型并沒(méi)有多大幫助,在第 50 次遍歷后,誤差并沒(méi)有減少。因此,訓(xùn)練該算法的最佳遍歷數(shù)大約是 50。
現(xiàn)在我們已經(jīng)訓(xùn)練了我們的模型,我們可以使用它來(lái)進(jìn)行預(yù)測(cè)。
在本例中,我們將 100 賦值給模型的輸入變量,然后模型會(huì)返回預(yù)測(cè)的英里數(shù):
kilometers = 100
predictedMiles = model.predict([kilometers])
print("The conversion from Kilometres to Miles is as follows: " + str(predictedMiles))
從公里到英里的換算為 62.133785.
milesByFormula = kilometers * 0.6214
print("The conversion from kilometers to miles using the mathematical formula is as follows:" + str(milesByFormula))
diference = milesByFormula - predictedMiles
print("Prediction error:" + str(diference))
使用公式從公里到英里的換算值為:62.13999999999999。預(yù)測(cè)誤差為 0.00621414
通過(guò)本例,我們了解了如何使用 TensorFlow 庫(kù)來(lái)創(chuàng)建一個(gè)模型,這個(gè)模型已經(jīng)學(xué)會(huì)自動(dòng)將公里數(shù)轉(zhuǎn)換為英里數(shù),并且誤差很小。
TensorFlow 用于執(zhí)行此過(guò)程的數(shù)學(xué)非常簡(jiǎn)單。基本上,本例使用線性回歸來(lái)創(chuàng)建模型,因?yàn)檩斎胱兞浚ü飻?shù))和輸出變量(英里數(shù))是線性相關(guān)的。在機(jī)器學(xué)習(xí)中,過(guò)程中最耗時(shí)的部分通常是準(zhǔn)備數(shù)據(jù)。
隨著時(shí)間的推移,我們收獲了一些經(jīng)驗(yàn),這些經(jīng)驗(yàn)可以幫助我們選擇最適合的算法及其設(shè)置,但一般來(lái)說(shuō),這是一項(xiàng)分析測(cè)試并改進(jìn)的任務(wù)。
作者介紹
Kesk,軟件工程師,軟件愛(ài)好者,科幻作家。
原文鏈接
https://betterprogramming.pub/build-your-first-machine-learning-model-with-tensorflow-ffc2f7cbf4f2
—版權(quán)聲明—
僅用于學(xué)術(shù)分享,版權(quán)屬于原作者。
若有侵權(quán),請(qǐng)聯(lián)系微信號(hào):yiyang-sy 刪除或修改!