
機器視覺邊緣模式檢測
點擊下方卡片,關(guān)注“新機器視覺”公眾號
重磅干貨,第一時間送達
圖像邊緣是兩個具有不同灰度的均勻圖像區(qū)域的邊界,邊緣檢測是圖像處理的基本問題,目的是標識數(shù)字圖像中亮度變化明顯的邊緣點,不斷向上構(gòu)成更高層次的特征描述。并且剔除不相關(guān)的特征信息,保留圖像重要的結(jié)構(gòu)屬性。
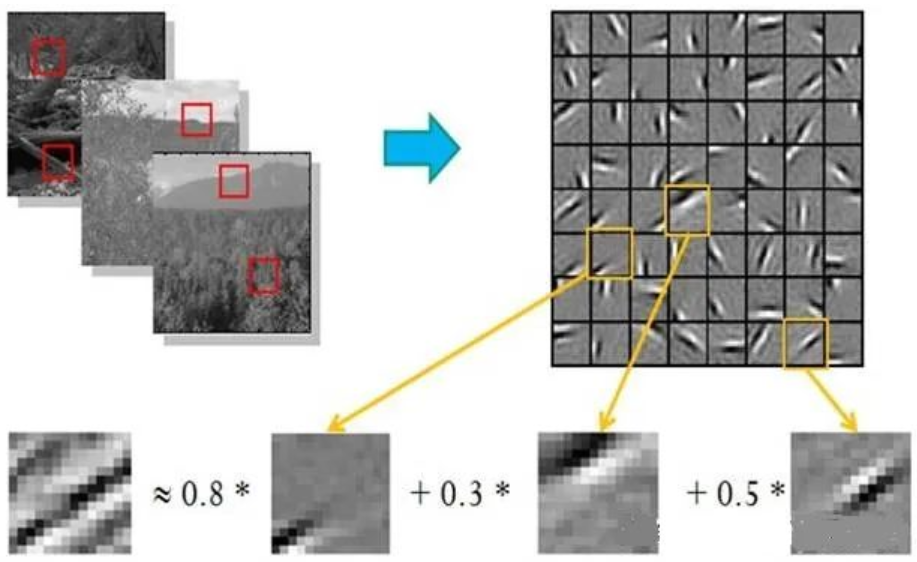
在視覺計算理論框架中,抽取二維圖像上的邊緣、角點、紋理等基本特征,是整個系統(tǒng)框架中的第一步,圖像中局部灰度級以簡單的方式作極快變換的小區(qū)域特征所組成的圖稱為基元圖,在不同"尺度"意義下的邊緣點,在一定條件下包含了原圖像的全部信息。
檢測方法
濾波
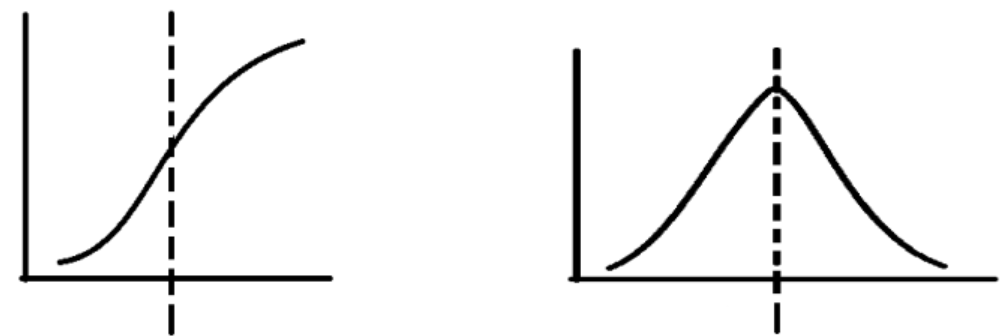
邊緣檢測算法主要是基于圖像強度的一階和二階導數(shù),但導數(shù)的計算對噪聲很敏感,因此使用濾波器來改善與噪聲有關(guān)的邊緣檢測器的性能。大多數(shù)濾波器在降低噪聲的同時也導致了邊緣強度的損失,因此,增強邊緣和降低噪聲之間需要折中。
檢測
在圖像中有許多點的梯度幅值比較大,這些點在特定的應用領域中并不都是目標邊緣,所以應該用某種算法來確定哪些點是邊緣點。

在圖像邊緣檢測中,抑制噪聲和邊緣精確定位是無法同時滿足的,一些邊緣檢測算法通過平滑濾波去除噪聲的同時,也增加了邊緣定位的不確定性。而提高邊緣檢測算子對邊緣的敏感性的同時,也提高了對噪聲的敏感性。
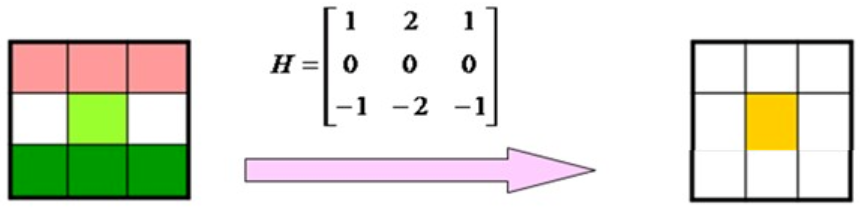
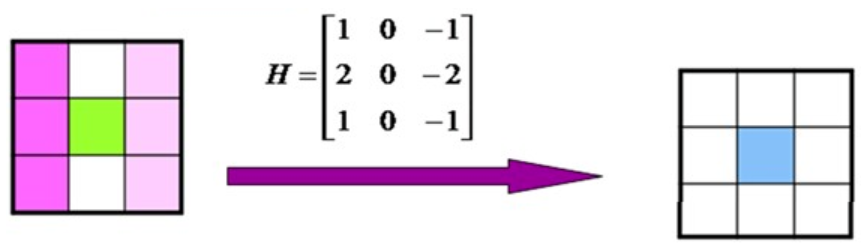
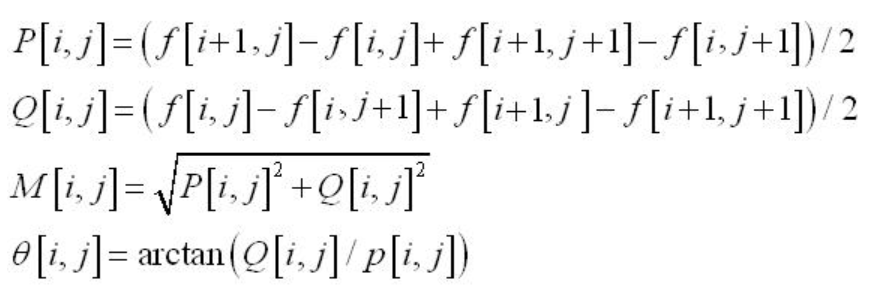
如上述所說,一階算子檢測邊緣,如Robert,雖然對邊緣定位精度較高,但是容易丟失邊緣,對噪聲無抑制能力。又如Sobel,對噪聲僅有一點抑制能力,但無法完全排除虛假邊緣。又如二階拉普拉斯算子,對噪聲響應很高。或者改進后的高斯-拉普拉斯算法,雖然經(jīng)過高斯模糊,但是這些模糊不能完全去除噪聲,沒處理的好,反而會影響邊緣檢測的效果。
來源:西安德伍拓
本文僅做學術(shù)分享,如有侵權(quán),請聯(lián)系刪文。