
實操教程|用CNN實現(xiàn)全景圖像語義分割!
極市導(dǎo)讀
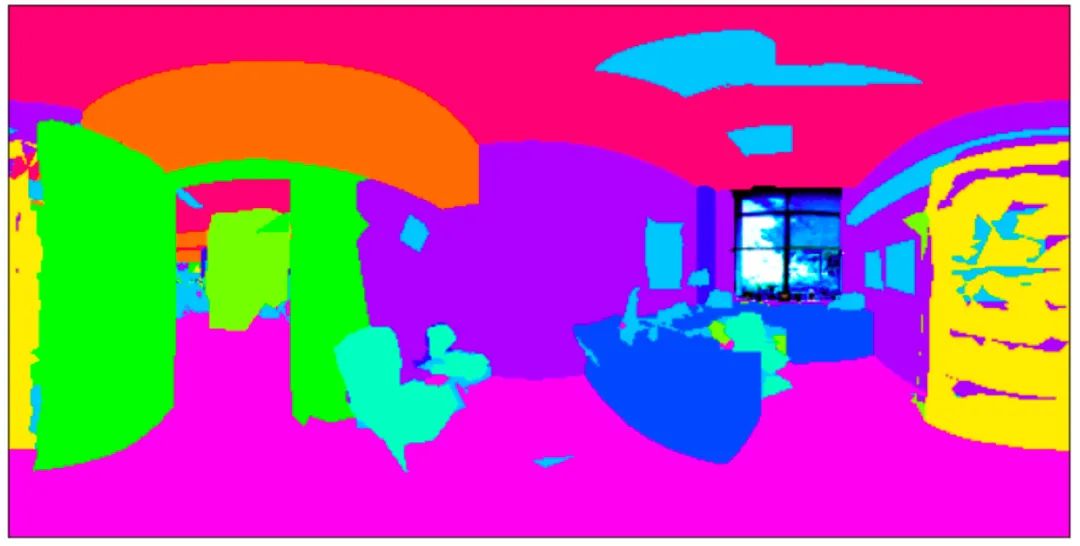
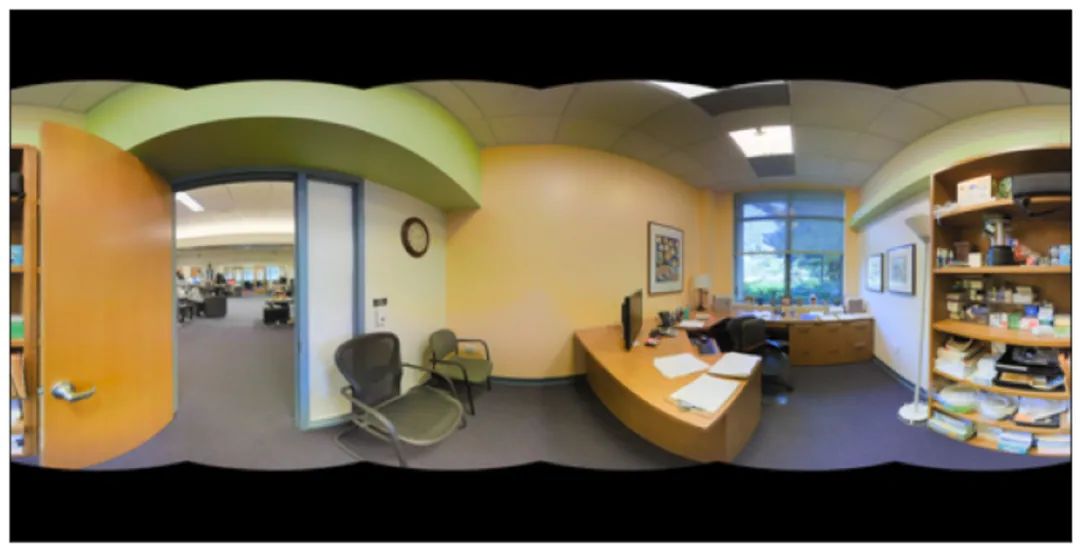
本文手把手帶你實踐一個有趣的應(yīng)用——全景圖像語義分割,使用多種傳統(tǒng)CNN方法和球面CNN方法進(jìn)行對比。如下圖所示,全景圖分割實例像素級別分類,每種實例對應(yīng)一個標(biāo)簽。完成本教程后,你將能夠做一個圖中所示的全景圖小應(yīng)用。 >>加入極市CV技術(shù)交流群,走在計算機視覺的最前沿
相信許多讀者體驗過b站上的全景視頻,如果還沒有,快來體驗一下吧[1]!只需鼠標(biāo)點擊并移動,便可360度無死角的瀏覽全景視頻,讓人如同身臨其境。全景圖像,又稱360°全景圖,其數(shù)據(jù)分布在球面空間上。但是,當(dāng)我們將全景圖像展開時,會造成畸變。
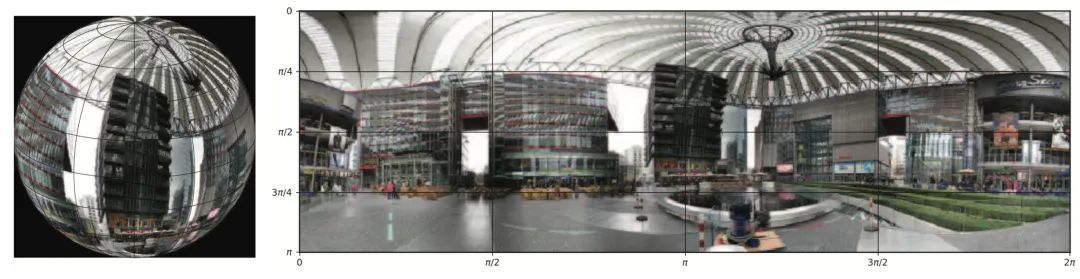
怎么處理?直接將傳統(tǒng)二維平面圖像處理方法應(yīng)用到球面數(shù)據(jù)上,其效果則會大大降低。而要解決分布在球面空間上的數(shù)據(jù),需要特定的方法,比如球面卷積網(wǎng)絡(luò)。本文手把手帶你實踐一個有趣的應(yīng)用——全景圖像語義分割,使用多種傳統(tǒng)CNN方法和球面CNN方法進(jìn)行對比。如下圖所示,全景圖分割實例像素級別分類,每種實例對應(yīng)一個標(biāo)簽。完成本教程后,你將能夠做一個圖中所示的全景圖小應(yīng)用。
文章數(shù)據(jù)集獲取與代碼地址見文末。
1. 環(huán)境構(gòu)建
基于深度學(xué)習(xí)的編程環(huán)境往往有各種復(fù)雜的環(huán)境依賴,而各種安裝報錯總是消磨我們的時間,其實之一過程可以大大縮短。我們所需要的也就是通過一個命令安裝所有的依賴并打開環(huán)境
make up #等價于 docker-compose up -d
再通過一個命令
make in
來進(jìn)入我們需要的環(huán)境,然后運行程序。為實現(xiàn)構(gòu)建這一過程,基于docker –docker-compose – make來搭建我們的環(huán)境,其原理如下圖所示:
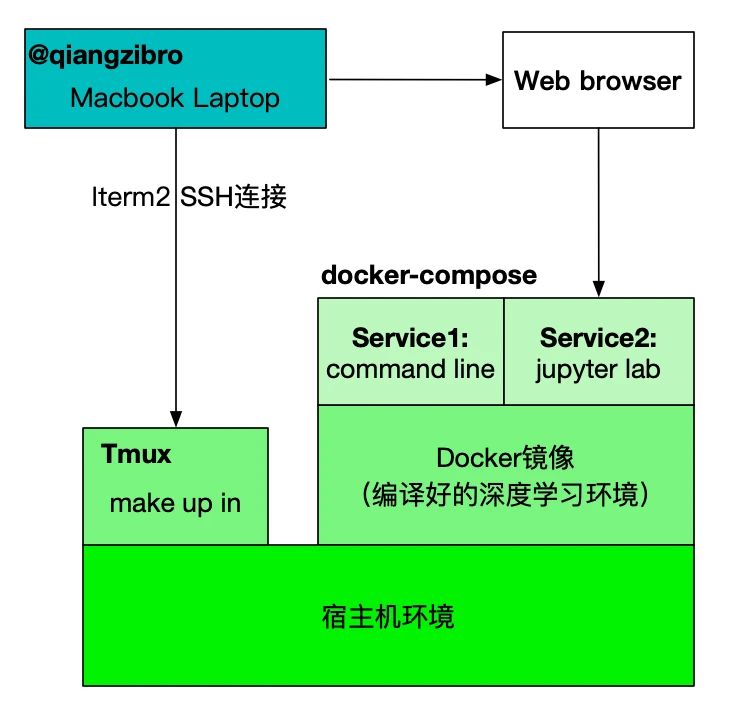
docker –docker-compose – make三個工具對應(yīng)三個配置文件,都在項目根目錄進(jìn)行了聲明:
Dockerfiledocker-compose.ymlMakefile
其中
Dockerfile定義了實驗所需要的所有環(huán)境,依據(jù)此文件可以編譯成docker鏡像,其中包含我們需要的庫docker-compose.yml定義了鏡像的啟動方式,在本文中,我們定義兩個服務(wù),一個作為終端來運行命令,一個作為jupyter lab供調(diào)試Makefile定義了啟動環(huán)境的方式
本文實驗環(huán)境:Ubuntu20.04,CUDA11.0,Pytorch1.7
Docker安裝
# 1.安裝dockersudo apt install -y docker docker.io# 2.安裝英偉達(dá)dockerdistribution=$(. /etc/os-release;echo $ID$VERSION_ID) \&& curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add - \&& curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.listsudo apt-get updatesudo apt-get install -y nvidia-docker2# 3.安裝docker-compose(apt常常不能安裝最新版本的docker-compose)pip install docker-compose# 4.解決linux下docker的權(quán)限問題,將用戶放在docker組里GROUPNAME=dockergetent group $GROUPNAME 2>&1 >/dev/null || groupadd $GROUPNAMEsudo usermod -aG docker $(whoami)# 5.重啟sudo systemctl daemon-reloadsudo systemctl restart docker
使用Docker鏡像
Docker鏡像構(gòu)建好之后,可以直接運行docker命令啟動鏡像,但是這樣不是最方便的。使用docker-compose搭配Makefile,具體操作如下:首先寫好docker-compose.yml啟動文件,可參考本項目對應(yīng)的docker-compose.yml,接著,在Makefile里寫常見docker相關(guān)命令,我們將應(yīng)用分為啟動(up)、關(guān)閉(down)、進(jìn)入容器環(huán)境(in)三個需求,Makefile如下:
up: docker-compose up -ddown: docker-compose downin: docker-compose exec spherical-env bash
本項目鏡像已上傳dockerhub,可以直接使用下列命令下載
docker pull qiangzibro/spherical_image_segmentation# 或者使用下面命令自己編譯make build
接著,一鍵完成編譯、啟動
make up #等價于 docker-compose up -d
再通過下列命令便可以進(jìn)入終端
make in
使用docker-compose logs可以看到notebook對應(yīng)的網(wǎng)址
2. 數(shù)據(jù)獲取
使用2D-3D-S 數(shù)據(jù)集進(jìn)行本實驗,該數(shù)據(jù)集提供了來自 2D、2.5D 和 3D 域的各種相互注冊的數(shù)據(jù),以及實例級語義和幾何注釋。它收集在來自 3 座不同建筑的 6 個大型室內(nèi)區(qū)域。它包含超過 70,000 張 RGB 圖像,以及相應(yīng)的深度、表面法線、語義注釋、全局 XYZ 圖像(均以常規(guī)和 360° 等距柱狀圖圖像的形式)以及相機信息。它還包括注冊的原始和語義注釋 3D 網(wǎng)格和點云。
數(shù)據(jù)集從開源數(shù)據(jù)集網(wǎng)站格物鈦獲取,這個網(wǎng)站匯總了AI開發(fā)者常見的公開數(shù)據(jù)集,用戶可以對數(shù)據(jù)集進(jìn)行可視化預(yù)覽、在線使用和下載等操作。
這里我們不用下載,可以直接通過SDK讀取數(shù)據(jù)集,操作步驟如下:a. 打開本文對應(yīng)數(shù)據(jù)集鏈接 https://gas.graviti.cn/dataset/qiangzibro/spherical_segmentationb. 右上角注冊登錄
c. fork數(shù)據(jù)集
d. 點擊網(wǎng)頁上方開發(fā)者工具,獲取使用SDK所需的AccessKey,獲取到 AccessKey 后,將其存在項目根目錄的gas_key.py里。
KEY = "<Your-Key>"
然后即可以通過AccessKey可以上傳數(shù)據(jù)、讀取數(shù)據(jù)、使用數(shù)據(jù),靈活對接模型開發(fā)和訓(xùn)練,與數(shù)據(jù)pipeline快速集成。
 e. AccessKey寫入后就可以寫代碼讀取數(shù)據(jù)了。
e. AccessKey寫入后就可以寫代碼讀取數(shù)據(jù)了。
from PIL import Imagedataset = Dataset("DatasetName", gas)segment = dataset[0]for data in segment: with data.open() as fp: image = Image.open(fp) width, height = image.size image.show()
3. 方法
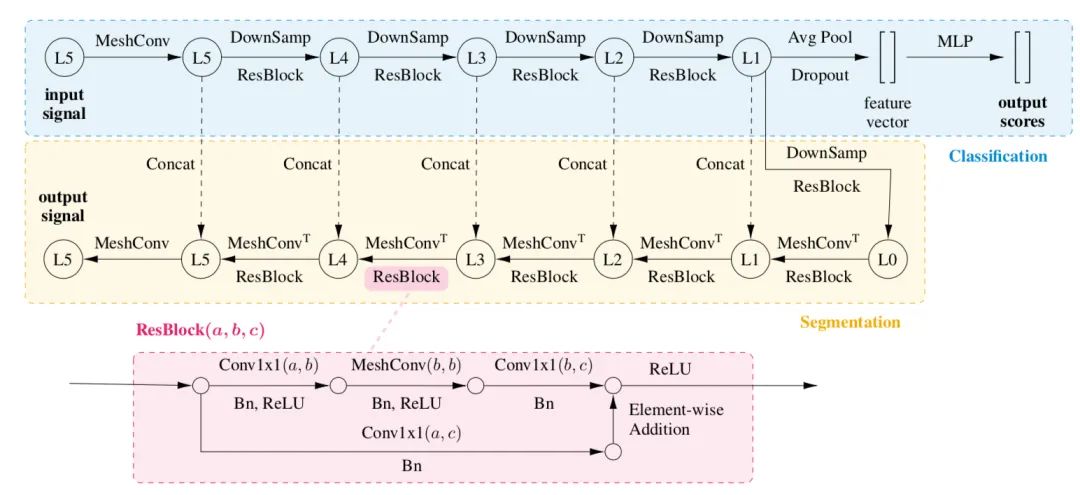
使用多種二維CNN方法和球面卷積方法UGSCNN。其中,二維CNN有三種:UNet、ResNet和FCN;UGSCNN[3]參考自論文《Spherical CNNs on Unstructured Grids》,下面著重看一下UGSCNN的方法。MeshConv對卷積算子進(jìn)行定義:
class MeshConv(_MeshConv): def __init__(self, in_channels, out_channels, mesh_file, stride=1, bias=True): super(MeshConv, self).__init__(in_channels, out_channels, mesh_file, stride, bias) pkl = self.pkl if stride == 2: self.nv_prev = pkl['nv_prev'] L = sparse2tensor(pkl['L'].tocsr()[:self.nv_prev].tocoo()) # laplacian matrix V->V F2V = sparse2tensor(pkl['F2V'].tocsr()[:self.nv_prev].tocoo()) # F->V, #V x #F else: # stride == 1 self.nv_prev = pkl['V'].shape[0] L = sparse2tensor(pkl['L'].tocoo()) F2V = sparse2tensor(pkl['F2V'].tocoo()) self.register_buffer("L", L) self.register_buffer("F2V", F2V) def forward(self, input): # compute gradient grad_face = spmatmul(input, self.G) grad_face = grad_face.view(*(input.size()[:2]), 3, -1).permute(0, 1, 3, 2) # gradient, 3 component per face laplacian = spmatmul(input, self.L) identity = input[..., :self.nv_prev] grad_face_ew = torch.sum(torch.mul(grad_face, self.EW), keepdim=False, dim=-1) grad_face_ns = torch.sum(torch.mul(grad_face, self.NS), keepdim=False, dim=-1) grad_vert_ew = spmatmul(grad_face_ew, self.F2V) grad_vert_ns = spmatmul(grad_face_ns, self.F2V) feat = [identity, laplacian, grad_vert_ew, grad_vert_ns] out = torch.stack(feat, dim=-1) out = torch.sum(torch.sum(torch.mul(out.unsqueeze(1), self.coeffs.unsqueeze(2)), dim=2), dim=-1) out += self.bias.unsqueeze(-1) return out
分割網(wǎng)絡(luò)基于MeshConv算子構(gòu)建了一個Unet網(wǎng)絡(luò):
4. 訓(xùn)練
環(huán)境構(gòu)建好后只需簡單的幾個命令便可以運行起來
 再使用
再使用make in成功進(jìn)入到容器終端
基于CNN對網(wǎng)格進(jìn)行分割
cd cnns# 基于./run.sh UNet# 基于FCN./run.sh FCN8s# 基于ResNetDUCHDC./run.sh ResNetDUCHDC
腳本run.sh解釋
# Model choice# ResNetDUCHDC,FCN8s,UNet# Run example# 1) ./run.sh# 2) ./run.sh FCN8s# 3) ./run.sh ResNetDUCHDCmodel="${1:-UNet}"MESHFILES=../data/mesh_filesDATADIR=../data/2d3ds_pano_small/# create log directorymkdir -p logspython train.py \--batch-size 16 \ # 訓(xùn)練批量大小--test-batch-size 16 \ #測試批量大小--epochs 200 \ # 訓(xùn)練epoch數(shù)量--data_folder $DATADIR \--mesh_folder $MESHFILES \ # 正二十面體網(wǎng)格文件位置--fold 3 \ # K-fold交叉驗證,k=3。將原始數(shù)據(jù)分成K組(K-Fold),將每個子集數(shù)據(jù)分別做一次驗證集,其余的K-1組子集數(shù)據(jù)作為訓(xùn)練集,這樣會得到K個模型。這K個模型分別在驗證集中評估結(jié)果,最后的誤差MSE(Mean Squared Error)加和平均就得到交叉驗證誤差。交叉驗證有效利用了有限的數(shù)據(jù),并且評估結(jié)果能夠盡可能接近模型在測試集上的表現(xiàn),可以做為模型優(yōu)化的指標(biāo)使用。--log_dir logs/log_${model}_f16_cv3_rgbd \ # 日志目錄--decay \ # 學(xué)習(xí)率衰減--train_stats_freq 5 \--model ${model} \ #模型選擇--in_ch rgbd \ # 輸入數(shù)據(jù)通道--lr 1e-3 \ # 學(xué)習(xí)路--feat 16 #特征層的數(shù)量
基于UGSCNN對球面數(shù)據(jù)進(jìn)行分割
cd ugscnn./run.sh
訓(xùn)練200個epoch后,可得如下結(jié)果:

5. 測試
使用提供的測試腳本test.sh即可進(jìn)行測試
# 基于UNet./test.sh UNet# 基于FCN./test.sh FCN8s# 基于ResNetDUCHDC./test.sh ResNetDUCHDC
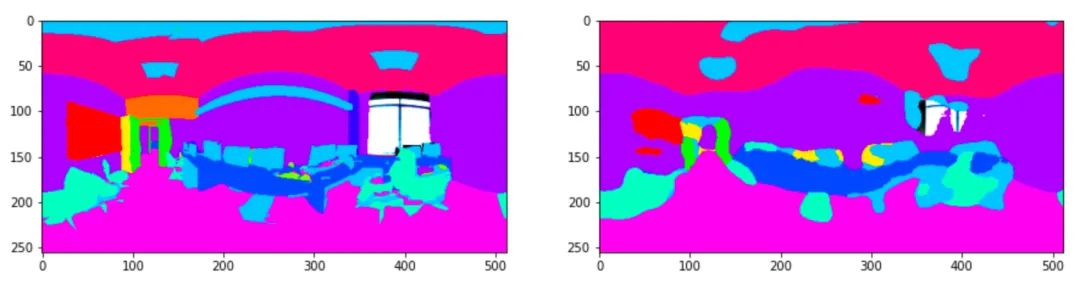
測試結(jié)果保存在當(dāng)前目錄下,命名格式為模型名+.npz,將其打開進(jìn)行結(jié)果分析,如下所示。全景圖實例:
結(jié)果:
總結(jié)
本文介紹了docker作為環(huán)境構(gòu)建的知識,介紹幾種基于傳統(tǒng)CNN方法和一種基于球面CNN的方法,并將上述方法在全景數(shù)據(jù)集上完成了分割任務(wù)。數(shù)據(jù)集地址(代碼上傳在數(shù)據(jù)集討論區(qū)):https://gas.graviti.cn/dataset/datawhale/SphericalSegmentation
參考資料
[ 1 ] : https://www.bilibili.com/video/BV1NT4y1w7cy?from=search&seid=10079355191633664125
[ 2 ] : https://mp.weixin.qq.com/s/RZqa9aNgK--7pnkJHV1cAw
[ 3 ] : https://www.graviti.cn/
[ 4 ] : https://github.com/maxjiang93/ugscnn/
如果覺得有用,就請分享到朋友圈吧!
公眾號后臺回復(fù)“CVPR21檢測”獲取CVPR2021目標(biāo)檢測論文下載~

# CV技術(shù)社群邀請函 #

備注:姓名-學(xué)校/公司-研究方向-城市(如:小極-北大-目標(biāo)檢測-深圳)
即可申請加入極市目標(biāo)檢測/圖像分割/工業(yè)檢測/人臉/醫(yī)學(xué)影像/3D/SLAM/自動駕駛/超分辨率/姿態(tài)估計/ReID/GAN/圖像增強/OCR/視頻理解等技術(shù)交流群
每月大咖直播分享、真實項目需求對接、求職內(nèi)推、算法競賽、干貨資訊匯總、與 10000+來自港科大、北大、清華、中科院、CMU、騰訊、百度等名校名企視覺開發(fā)者互動交流~
