
機(jī)器人與人工智能的關(guān)系,終于有人講明白了
01 機(jī)器人的人工智能
機(jī)器人是由什么組成的,它與機(jī)器又有什么不同呢?這個(gè)問題的答案在過去80年間已經(jīng)發(fā)生了變化。類人自動機(jī),如Rossum's Universal Robots和The Metropolis中的那些,就是以人體為模型的,但缺乏平滑的人體特征和肢體方向,也缺少人類情感。
隨著工業(yè)和制造業(yè)的發(fā)展以及生產(chǎn)線和汽車工業(yè)的自動化,機(jī)器人的概念或多或少被局限于從事重復(fù)的“拿和放”作業(yè)的機(jī)械手臂。用于移動和其他比較高級的用途(如導(dǎo)航、簡單行為、社交作用等方面)的機(jī)器人,在Walter的海龜之后才開始有起色。
不同于工業(yè)機(jī)械臂,人工智能機(jī)器人會對本地環(huán)境進(jìn)行導(dǎo)航和探索,具有明顯的智能,很多時(shí)候是為了完成特定的任務(wù)或作為特定角色的,如探索機(jī)器人、家用機(jī)器人、搜救機(jī)器人等。
Bekey提出了以下機(jī)器人定義:
……機(jī)器人是一個(gè)機(jī)器,在世界上感覺、思考、行動……
這個(gè)定義并沒有與給定的任務(wù)相關(guān)聯(lián),也沒有突出機(jī)器人與環(huán)境的交互。因此以下4類機(jī)器人都被此定義涵蓋了:
從事重復(fù)性工作的機(jī)器人,如工業(yè)級機(jī)器人和機(jī)械手臂;
那些缺少明確指令的機(jī)器人,如火星探測器;
社交機(jī)器人領(lǐng)域的那些有著人類外觀的自動機(jī)或類人機(jī)器人;
通過擴(kuò)展生物技術(shù)制造的未來機(jī)器人,如Android機(jī)器人和半機(jī)器人。
這個(gè)定義不局限于普遍接受的機(jī)器人機(jī)電一體化的設(shè)計(jì),即通過處理單元將機(jī)械和電子進(jìn)行了融合。然而,工程方向的角度傾向于限制這個(gè)定義,即機(jī)器人應(yīng)該有電子、機(jī)械硬件以及處理單元。沒有電子和處理單元的驅(qū)動更多是在自動機(jī)領(lǐng)域,由壓縮彈簧、氣動閥和/或液壓控制,比如Philon設(shè)計(jì)的那些以及日本的Karakuri木偶。
自那之后,機(jī)器人的定義就基于它們參與實(shí)際任務(wù)的能力,沒有外在控制,人們傾向于認(rèn)為機(jī)器人真的在“思考”,因?yàn)樗幚韥碜詡鞲衅鞯臄?shù)據(jù)到處理單元的動作與人類大腦的工作方式很相似。盡管這僅僅是執(zhí)行代碼段,本質(zhì)上并非思考。
機(jī)器人的特定目標(biāo)可以是具體的,如線跟蹤、光線追蹤或撿起空可樂瓶,也可以是朝著預(yù)定的方向邁進(jìn)的一系列雜務(wù),如軍事機(jī)器人、護(hù)士機(jī)器人、家政服務(wù)機(jī)器人或者辦公室助理機(jī)器人。
Murphy給出了一個(gè)更以人工智能為中心的定義:
一個(gè)可以自主運(yùn)作的機(jī)械生物。
這個(gè)定義特別提到“生物”,和擬人論一致,也和Toda與Wilson的作品相吻合。不言而喻,它也暗示著自主功能和智能行為有重合之處。
作為本文范圍內(nèi)的有效定義,機(jī)器人是一個(gè)自主或者半自主的主體,在人類的直接控制下進(jìn)行工作;或者是部分自主,由人類監(jiān)督并由人類監(jiān)督訓(xùn)練;或者是完全自主。我們會發(fā)現(xiàn)這個(gè)定義并不完善,隨著我們朝著基于智能體的機(jī)器人的更新領(lǐng)域前進(jìn),這個(gè)定義將被修正。
艾倫·圖靈在20世紀(jì)30年代末提出了早期的人工智能概念,以及他稱為自動機(jī)的假設(shè)模型,之后被命名為圖靈機(jī)。這是中央處理器的骨架,促進(jìn)了計(jì)算機(jī)在戰(zhàn)后時(shí)代的設(shè)計(jì)。在McCarthy、Minsky、Newell和Simon的開創(chuàng)性努力下,這些早期的概念形成了一門新興學(xué)科。
人工智能可以分為以下7個(gè)分支:
1. 知識表示
機(jī)器人如何表示世界?在人類環(huán)境中,對于簡單的工作,比如定位,我們傾向于用地圖或地標(biāo)并依靠之前的知識和經(jīng)驗(yàn)。
機(jī)器人則用激光或聲吶來做這件事,現(xiàn)實(shí)世界里的一張桌子將被轉(zhuǎn)換為一個(gè)與傳感器感知強(qiáng)度相對應(yīng)的數(shù)字?jǐn)?shù)組。如果機(jī)載微處理器不是很強(qiáng)大,這些方法會根據(jù)維度進(jìn)行近似,把物體縮小成各種各樣的立方體、長方體等,就像一個(gè)縮小版的世界。
2. 自然語言
語言是獨(dú)一無二的,因?yàn)檫@種句法和語義結(jié)構(gòu)的統(tǒng)一只存在于人類而不存在于動物身上,語言是我們文化和社會體系的決定性基礎(chǔ)。著名的語言學(xué)家Noam Chomsky認(rèn)為,語言處于兩個(gè)突出的認(rèn)知過程的接合處:它是外化的感覺運(yùn)動,是更有目的性和協(xié)商式的概念化心理過程。
讓機(jī)器人理解并回應(yīng)人類的聲音僅僅在設(shè)計(jì)和開發(fā)更復(fù)雜的機(jī)器人當(dāng)中發(fā)揮作用,這些機(jī)器人可以和人類社會緊密互動。自然語言處理庫和聊天機(jī)器人很具發(fā)展前景。基于語音的系統(tǒng)仍然在探索中,蘋果的Siri、微軟的Cortana、谷歌的Google Now都是很具前景的。
3. 學(xué)習(xí)
在編程機(jī)器人時(shí),會帶有很多任務(wù)特定的策略,但是這些并不詳細(xì),而且為了能有效地運(yùn)行,機(jī)器人必須從經(jīng)驗(yàn)中學(xué)習(xí)。流行的學(xué)習(xí)范式有基于案例的方法、人工神經(jīng)網(wǎng)絡(luò)、模糊邏輯以及進(jìn)化方法。幾乎所有最先進(jìn)的機(jī)器人都有一個(gè)學(xué)習(xí)模塊。
4. 計(jì)劃和問題解決
制訂計(jì)劃或者算法步驟去完成一個(gè)目標(biāo)并解決過程中遇到的問題的能力是AI智能體所固有的,并且通常是它們運(yùn)行表現(xiàn)的一個(gè)標(biāo)志。對于簡單的機(jī)器人來說,計(jì)劃大多是運(yùn)動規(guī)劃。然而,更有意思的任務(wù)也需要計(jì)劃,如解決魔方問題、下棋、玩滑塊拼圖、堆積木、制定日常家務(wù)日程表等。
5. 推理
從不完整或不準(zhǔn)確的數(shù)據(jù)集中得出結(jié)論。機(jī)器人經(jīng)常從傳感器得到不準(zhǔn)確的數(shù)據(jù)。為了應(yīng)對這種情況,避免系統(tǒng)完全崩潰,機(jī)器人必須依賴推理,確保過程的連續(xù)性。
6.搜索
對于機(jī)器人通常意味著在物理空間中進(jìn)行搜索——搜索一個(gè)物體或一個(gè)目標(biāo)點(diǎn),但也可以意味著啟發(fā)式的搜索,機(jī)器人以分析的方式搜索解決方案。
7. 視覺
已經(jīng)成為機(jī)器人的一個(gè)主要部分。對人類來說,和其他感官相比,視覺是獨(dú)一無二的,和我們的大部分運(yùn)動動作都相關(guān),這一點(diǎn)同樣適用于大部分動物世界。因此發(fā)明能夠處理其本地環(huán)境的智能模型的努力必須訴諸視覺。
心理學(xué)家認(rèn)為,視覺影響著我們的內(nèi)心世界,而幾乎我們的每一個(gè)行為結(jié)果都會先在內(nèi)心世界中進(jìn)行模擬,然后才在真實(shí)世界中做出行動。
自Gibson和隨后的Marr的早期先驅(qū)研究開始,視覺在人工智能中就占有重要的一席之地。視覺不像其他感官,“看”和“看見”的融合似乎是一個(gè)協(xié)商式過程,涉及我們大腦的快速處理。但是最近,動作性模式已經(jīng)將視覺作為一種開發(fā)性感覺運(yùn)動模型。
02 什么是“智能體”
術(shù)語“智能體”可交替地用于機(jī)器人、程序、行為、動畫角色等,并可以表示軟件和硬件實(shí)現(xiàn)。Russell和Norvig將智能體限定為一個(gè)抽象實(shí)體,通過傳感器感知環(huán)境,通過效應(yīng)器作用于環(huán)境。移動機(jī)器人研究中“自主智能體”這個(gè)術(shù)語非常普遍,自主更多是根據(jù)情境或者根據(jù)行為定義。
松散自主也就意味著不需要其他實(shí)體進(jìn)行輸入,也不需要其他條件保持其運(yùn)行。機(jī)器人能夠在動態(tài)環(huán)境中感知和行動,以實(shí)現(xiàn)給定的和隱含的目標(biāo),而且它們可以在沒有任何外部干預(yù)的情況下持續(xù)工作很長一段時(shí)間。
在Russell和Norvig確認(rèn)了感知和行動之間的聯(lián)系的基礎(chǔ)上,F(xiàn)ranklin和Graesser為自主智能體提出了如下定義:
自主智能體是一個(gè)位于環(huán)境中并且是這個(gè)環(huán)境的一部分的系統(tǒng),它能夠感知環(huán)境,并隨著時(shí)間的推移對其進(jìn)行作用,以追求自己的目標(biāo),從而影響其未來的感知。
這里智能體是環(huán)境的一部分,并在交互的基礎(chǔ)上成長,如圖2.1所示。這條思路引出了一個(gè)分類,由Luck等人提出,如圖2.2所示。
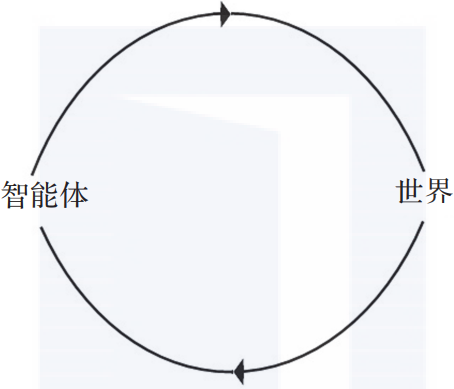
▲圖2.1 智能體—世界循環(huán)。智能體與世界循環(huán)地交互:智能體作用于世界,世界的改變影響著智能體的感知
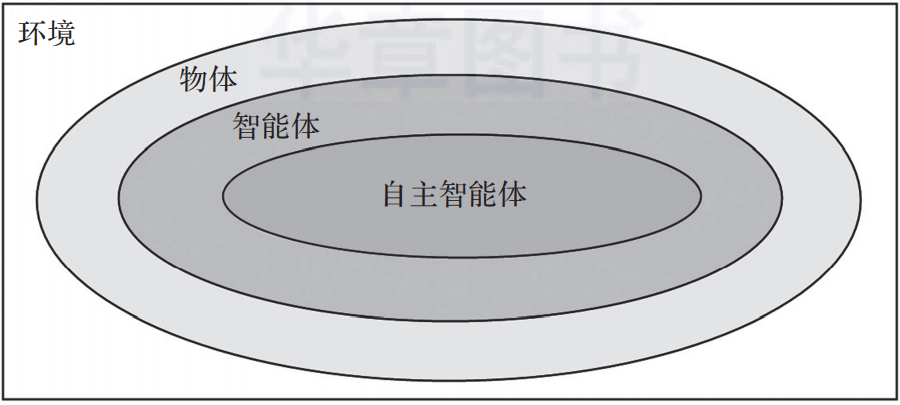
▲圖2.2 自主智能體定義,改編自Luck等人
然而,因?yàn)橹黧w是基于環(huán)境的,對智能體和非智能體的嚴(yán)格分類,就算不是重復(fù)的,也是不必要的。每個(gè)智能體都位于世界之中,也是這個(gè)世界的一部分。它能夠和世界交互,改變這個(gè)世界以及自身的認(rèn)知。請注意區(qū)分軟件智能體和程序。
舉例來說,打印一行文字的程序不算是智能體,因?yàn)樗窃趤碜杂脩舻妮斎肷瞎ぷ鞯摹K鼪]有任何與環(huán)境(在真實(shí)世界中)或其他程序(在軟件世界中)交互的設(shè)備。它的輸出也不會影響之后運(yùn)行的程序,它只運(yùn)行一次就會停止,缺乏時(shí)間的連續(xù)性。
電腦游戲里的角色(如Pac Man中的幽靈)就是智能體,因?yàn)樗鼈冇凶约旱母兄⑶矣幸庾R地與世界(Pac Man二維宇宙)交互,玩家的每一個(gè)動作都會產(chǎn)生相應(yīng)的結(jié)果,而這些結(jié)果又會激活來自幽靈的動作,從而動態(tài)地改變環(huán)境,并且一旦運(yùn)行,游戲角色就會一直執(zhí)行它們的任務(wù),直到游戲結(jié)束。
快速瀏覽一下已有的各種各樣的智能體定義是很值得的。最早的定義之一是由著眼于移動智能體技術(shù)的Virdhagriswaran提出的:
術(shù)語智能體用于呈現(xiàn)兩個(gè)正交概念。第一個(gè)是智能體的自主執(zhí)行能力,第二個(gè)是智能體執(zhí)行面向領(lǐng)域的推理的能力。
Russell和Norvig承認(rèn)感知和行動之間的聯(lián)系:
自主智能體是一個(gè)位于環(huán)境中并且是這個(gè)環(huán)境的一部分的系統(tǒng),它能夠感知環(huán)境,并隨著時(shí)間的推移對其進(jìn)行作用,以追求自己的目標(biāo),從而影響其未來的感知。
Maes從機(jī)器人學(xué)家的角度,增加了智能體對一組目標(biāo)的內(nèi)在追求:
自主智能體是存在于一些復(fù)雜動態(tài)環(huán)境中的計(jì)算系統(tǒng),在環(huán)境中自主感知和行動,由此實(shí)現(xiàn)為它們設(shè)計(jì)的一組目標(biāo)或者任務(wù)。
Hayes-Roth的定義將智能體交互看作是感知、行動和推理的重疊:
智能化智能體持續(xù)地執(zhí)行3個(gè)功能:環(huán)境中的動態(tài)條件感知,行動以影響環(huán)境中的條件,以及推理以解釋感知、解決問題、進(jìn)行推斷和決定行動。
這些定義還可以進(jìn)一步擴(kuò)展,即:
如大部分移動機(jī)器人那樣,作為認(rèn)知智能體,有從世界感知信息的能力;
與大量智能體協(xié)調(diào)一致工作,形成集體動力,就像在機(jī)器人組和群體機(jī)器人中那樣;
表現(xiàn)出很強(qiáng)的自主性、意向行為以及對定義道德行為能力(人工道德主體,Artificial Moral Agent,AMA)的責(zé)任的關(guān)注;
能夠構(gòu)建兩個(gè)或兩個(gè)以上事件的因果關(guān)系以及表現(xiàn)意識相似性的能力,這些都會引出有意識的主體。
推薦閱讀
(點(diǎn)擊標(biāo)題可跳轉(zhuǎn)閱讀)
【開源】23個(gè)優(yōu)秀的機(jī)器學(xué)習(xí)數(shù)據(jù)集
老鐵,三連支持一下,好嗎?↓↓↓