
激光雷達與相機—哪種更適合自動駕駛?
點擊下方卡片,關(guān)注“新機器視覺”公眾號
視覺/圖像重磅干貨,第一時間送達
?自動駕駛的行業(yè)專家一直在爭論LiDAR或相機誰更適合SAE 4級和5級駕駛。是否要將LiDAR與相機一起使用,還是僅使用不帶LiDAR的攝像頭系統(tǒng)。LiDAR的支持者包括Waymo,Cruise,Uber和Velodyne。特斯拉(Tesla)對LiDAR的支持最少,偏向攝像頭系統(tǒng)。哪個是最佳解決方案?

使用Cruise Automation LiDAR的自動駕駛汽車
特斯拉似乎已不勝枚舉,有更多的公司和開發(fā)商支持LiDAR。伊隆·馬斯克(Elon Musk)解釋了他的理由,不將LiDAR包括在他的Tesla汽車模型中。在Model 3或Model S上找不到LiDAR,但在Waymo的自動出租車上會看到它。到目前為止,這兩種技術(shù)都沒有被普遍接受為自動駕駛汽車的解決方案,因為道路上沒有完全達到4級或5級標(biāo)準(zhǔn)的全自動駕駛汽車(截至2020年9月)。

特斯拉Model S在相機系統(tǒng)上使用自動駕駛自動駕駛功能(無LiDAR)
LiDAR的使用并非僅限于自動駕駛汽車。它具有多種應(yīng)用,包括氣象學(xué),地震學(xué),地質(zhì)學(xué)和大氣物理學(xué)等。LiDAR使用光脈沖來檢測物體,就像雷達使用無線電波的方式一樣。這些脈沖可以確定物體的距離和范圍,為自動駕駛汽車提供急需的數(shù)據(jù)。例如,為了避免碰撞,LiDAR可以檢測到物體的距離,并施加制動器以使車輛減速。LiDAR已成為測量距離的可靠技術(shù),因此,工程師已將其用于包括自動駕駛汽車在內(nèi)的各種應(yīng)用中。
LiDAR可以幫助自動駕駛汽車根據(jù)其從光脈沖中獲得的讀數(shù)創(chuàng)建視覺地圖。LiDAR系統(tǒng)每秒發(fā)送數(shù)千個脈沖,以使用車載軟件為汽車提供有關(guān)其周圍環(huán)境的信息來創(chuàng)建3D地圖。這提供了360度的視角,可在任何情況下幫助汽車行駛。LiDAR與自動駕駛汽車中的攝像頭配合使用,因此它們本身并不是獨立的解決方案。
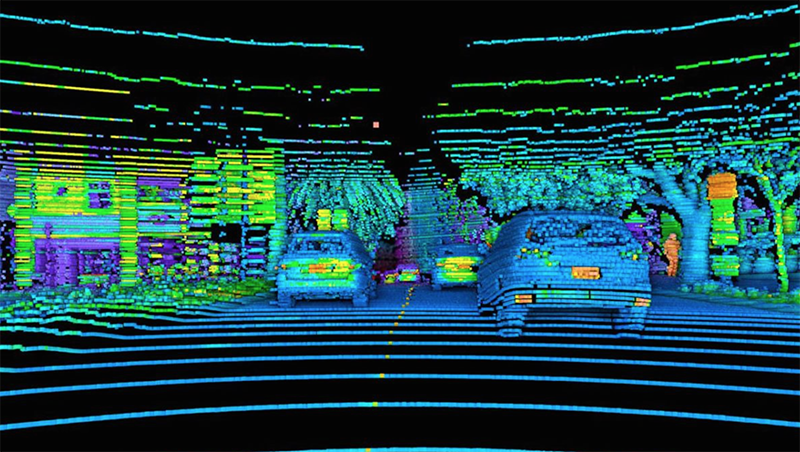
LiDAR可以創(chuàng)建其周圍的視覺地圖(來源:汽車世界)
如果要像人一樣開車,那么對物體的視覺識別就是必須的。那是使用相機系統(tǒng)的主要論點。相機提供圖像,使用AI的軟件可以高精度地分析這些圖像。特斯拉模型上的攝像頭通過其自動駕駛自動駕駛功能來提供其周圍環(huán)境的360度視圖。一切都是可視的,并且不像LiDAR一樣依賴測距和檢測。
相機代替光脈沖,而是使用從鏡頭中的光學(xué)元件返回到車載軟件的可視數(shù)據(jù)進行進一步分析。隨著神經(jīng)網(wǎng)絡(luò)和計算機視覺算法的發(fā)展,可以在汽車行駛時識別物體以提供汽車信息。這可以幫助汽車避免碰撞,在交通擁堵時減速,安全地改變車道,甚至可以使用OCR(光學(xué)字符識別)從道路或高速公路上的標(biāo)志中讀取文字。到目前為止,特斯拉已經(jīng)證明,使用攝像頭,自動駕駛汽車無需使用LIDAR即可表現(xiàn)出色。

使用帶有自動駕駛儀的攝像頭的Tesla Vision系統(tǒng)(來源:Tesla)
Elon Musk稱贊相機是最可靠的視覺系統(tǒng)。它在視覺識別方面具有更好的優(yōu)勢,可與AI一起識別道路上的物體。它還可以從路標(biāo)上讀取文字,這在自動駕駛汽車必須注意繞行和前方道路工作的情況下非常重要。特斯拉汽車上的攝像頭結(jié)合了光學(xué)技術(shù)和計算機視覺功能,可提供計算成像,從而連續(xù)分析攝像頭上的圖像。
LiDAR系統(tǒng)使用光脈沖在虛擬地圖上實時繪制點。自動駕駛汽車或自動駕駛汽車可以使用此數(shù)據(jù)安全地導(dǎo)航并避免撞到物體。能夠確定對象及其距離是使用LiDAR的重點。具有高度準(zhǔn)確性和可靠性的LiDAR系統(tǒng)可以提高安全性,這是有關(guān)自動駕駛汽車的主要話題之一。
LIDAR甚至在危險的天氣條件下也能夠看到物體而受到贊譽,但它并不總是可靠的。LiDAR受波長穩(wěn)定性和探測器靈敏度的影響。激光的波長會受到溫度變化的影響,而差的SNR(信噪比)會影響LiDAR檢測器中的傳感器。LiDAR也更昂貴,并且需要更多的空間在汽車上安裝,因此傾向于使自動駕駛汽車看起來更笨重。LiDAR的另一個問題是視覺識別,這是相機所擅長的。LiDAR需要更多的軟件數(shù)據(jù)處理來創(chuàng)建圖像和識別對象。
攝像頭雖然作為視覺系統(tǒng)更可靠,但沒有LiDAR的范圍檢測功能。盡管相機具有出色的成像能力,但作為一個獨立系統(tǒng),可能還不夠。這就是特斯拉還使用其他傳感器(包括雷達)檢測距離和距離的原因。批評人士說,相機仍然不能很好地避免危險,特別是在涉及天氣條件時。他們需要能夠在任何類型的條件下(例如人類駕駛員)準(zhǔn)確看到。
如果自動駕駛汽車合法上路,安全將是首要考慮的問題。使用這兩種系統(tǒng)的自動駕駛汽車已經(jīng)發(fā)生致命事故。使用自動駕駛儀的特斯拉駕駛員曾卷入事故,包括在美國高速公路上的死亡事故。在其他時候,這是由于分心駕駛造成的,因為這些汽車無法完全自動駕駛,仍需要駕駛員的注意。優(yōu)步在2018年時,它的一輛自動駕駛汽車撞上了一名行人。這些汽車尚未完全自動駕駛,因此駕駛員方面也可能被忽略。這些是自動駕駛汽車發(fā)展的陷阱。
如果安全是我們的首要考慮,那么融合LiDAR和攝像頭系統(tǒng)最佳元素的傳感器融合將是必要的。LiDAR和其他傳感器(包括攝像頭)的組合可以在公共安全方面提供很多優(yōu)勢。如果視覺系統(tǒng)(例如軟件,傳感器)對公共安全變得更加準(zhǔn)確和可靠,則LiDAR可能變得不必要。畢竟,自動駕駛汽車的主要原因之一是要最大程度地減少人為錯誤造成的事故。
在自動駕駛汽車中,LiDAR和攝像頭之間的共同因素是軟件。兩種系統(tǒng)均使用機器學(xué)習(xí)和神經(jīng)網(wǎng)絡(luò)等AI技術(shù)來分析數(shù)據(jù)。隨著算法的改進,結(jié)果還將導(dǎo)致識別物體的準(zhǔn)確性更高,并使自動駕駛汽車做出更好的決策。這可能意味著事故與安全駕駛之間的區(qū)別。
這不是一個簡單答案的簡單問題。在做出關(guān)鍵決策時,機器與人的思維方式不同。這就需要更多的數(shù)據(jù)和培訓(xùn),以使軟件得以改進。當(dāng)前的基礎(chǔ)設(shè)施可能也需要修改,以適應(yīng)自動駕駛汽車(例如V2X)。在無人駕駛汽車顯示出一致的數(shù)據(jù)表明使用一種技術(shù)而不是另一種技術(shù)之前,爭論仍在進行。
本文僅做學(xué)術(shù)分享,如有侵權(quán),請聯(lián)系刪文。
—THE END—