
激光雷達(dá)與相機(jī):哪個(gè)最適合自動(dòng)駕駛汽車?
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)


自動(dòng)駕駛汽車行業(yè)專家之間正在進(jìn)行的辯論是LiDAR(光檢測和測距)或相機(jī)是否最適合SAE 4級和5 級駕駛,爭論的焦點(diǎn)在于是否將 LiDAR 與相機(jī)系統(tǒng)一起使用,或者只使用沒有 LiDAR 的相機(jī)系統(tǒng)。LiDAR 的支持者包括 Waymo、Cruise、Uber 和 Velodyne。特斯拉對 LiDAR 的支持最少,而支持相機(jī)系統(tǒng)。哪個(gè)是最好的解決方案?答案是哪個(gè)更擅長識別物體和識別它們。自動(dòng)駕駛汽車需要有一種方法來識別它在路上看到的東西,這個(gè)比那個(gè)好嗎?

特斯拉似乎寡不敵眾,有更多公司和開發(fā)商支持 LiDAR。埃隆·馬斯克(Elon Musk)解釋了他在特斯拉汽車模型中不包括激光雷達(dá)的原因。你們不會在 Model 3 或 Model S 上找到 LiDAR,但你們會在 Waymo 的機(jī)器人出租車上看到它。到目前為止,這兩種技術(shù)都沒有被普遍接受為自動(dòng)駕駛汽車的解決方案,因?yàn)榈缆飞线€沒有達(dá)到 4 級或 5 級狀態(tài)的全自動(dòng)駕駛汽車。

LiDAR 的使用不僅限于自動(dòng)駕駛汽車,它具有多種應(yīng)用,包括氣象學(xué)、地震學(xué)、地質(zhì)學(xué)和大氣物理學(xué)等。LiDAR 使用光脈沖來檢測物體,就像雷達(dá)使用無線電波的工作原理一樣。這些脈沖可以確定物體的距離和范圍,為自動(dòng)駕駛汽車提供急需的數(shù)據(jù)。例如,為了避免碰撞,LiDAR 可以檢測到物體的距離并施加剎車以減慢車輛速度。LiDAR 在測量距離方面是一項(xiàng)經(jīng)過驗(yàn)證的技術(shù),因此工程師將其用于包括自動(dòng)駕駛汽車在內(nèi)的不同應(yīng)用。
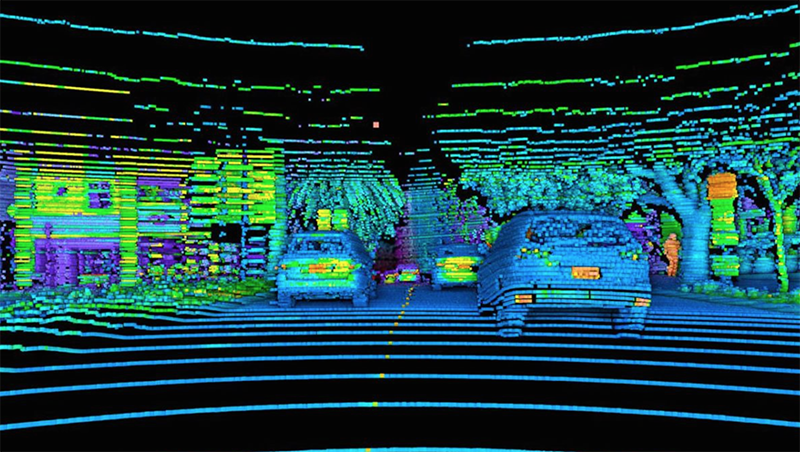
LiDAR 可以幫助自動(dòng)駕駛汽車根據(jù)從光脈沖中接收到的讀數(shù)創(chuàng)建視覺地圖。LiDAR 系統(tǒng)每秒發(fā)送數(shù)千個(gè)脈沖,使用車載軟件創(chuàng)建 3D 地圖,為汽車提供有關(guān)其周圍環(huán)境的信息。這提供了 360 度視圖,有助于汽車在任何類型的條件下行駛。LiDAR 與自動(dòng)駕駛汽車中的相機(jī)配合使用,因此它們本身并不是一個(gè)獨(dú)立的解決方案。
如果你們要像人類一樣開車,那么對物體進(jìn)行視覺識別就是你們要走的路。這是使用相機(jī)系統(tǒng)的主要論據(jù)。相機(jī)提供的圖像可供使用 AI 的軟件進(jìn)行高精度分析。特斯拉車型上的相機(jī)被其 Autopilot 自動(dòng)駕駛功能用于提供周圍環(huán)境的 360 度視圖。它完全是視覺的,不依賴于像 LiDAR 那樣的測距和檢測。
相機(jī)不使用光脈沖,而是使用從鏡頭中的光學(xué)元件返回到機(jī)載軟件的視覺數(shù)據(jù)進(jìn)行進(jìn)一步分析。隨著神經(jīng)網(wǎng)絡(luò)和計(jì)算機(jī)視覺算法的發(fā)展,可以在汽車行駛時(shí)識別物體以提供汽車信息。這有助于汽車避免碰撞、在交通擁堵時(shí)減速、安全地變道,甚至可以使用OCR(光學(xué)字符識別)讀取道路或高速公路上的標(biāo)志上的文字。到目前為止,特斯拉已經(jīng)表明,通過使用相機(jī),自動(dòng)駕駛汽車可以在沒有激光雷達(dá)的情況下運(yùn)行。

Elon Musk 稱贊相機(jī)是最可靠的視覺系統(tǒng)。它在視覺識別方面有更好的優(yōu)勢,配合人工智能識別道路上的物體。它還可以從道路標(biāo)志中讀取文本,這在自動(dòng)駕駛汽車必須注意繞路和前方道路工作的情況下非常重要。特斯拉汽車上的相機(jī)使用光學(xué)與計(jì)算機(jī)視覺相結(jié)合,提供計(jì)算成像,連續(xù)分析相機(jī)上的圖像。
LiDAR 系統(tǒng)使用光脈沖在虛擬地圖上實(shí)時(shí)繪制點(diǎn)。自動(dòng)駕駛汽車或自動(dòng)駕駛汽車可以使用這些數(shù)據(jù)來安全導(dǎo)航并避免撞到物體。能夠確定物體及其距離是使用 LiDAR 的強(qiáng)項(xiàng)。具有高度準(zhǔn)確性和可靠性的 LiDAR 系統(tǒng)可以提高安全性,這是有關(guān)自動(dòng)駕駛汽車的主要討論點(diǎn)之一。
激光雷達(dá)因即使在惡劣的天氣條件下也能看到物體而受到稱贊,但它并不總是可靠的。LiDAR 受波長穩(wěn)定性和檢測器靈敏度的影響。激光的波長會受到溫度變化的影響,而較差的 SNR(信噪比)會影響 LiDAR 探測器中的傳感器。LiDAR 也更昂貴,需要更多空間才能在汽車上實(shí)施,因此它往往會使自動(dòng)駕駛汽車看起來更笨重。LiDAR 的另一個(gè)問題是視覺識別,這是相機(jī)更擅長的。LiDAR 需要在軟件中進(jìn)行更多的數(shù)據(jù)處理來創(chuàng)建圖像和識別對象。
相機(jī)雖然作為視覺系統(tǒng)更可靠,但不具備 LiDAR 的范圍檢測功能。雖然相機(jī)的成像效果很好,但作為一個(gè)獨(dú)立的系統(tǒng),它可能還不夠。這就是為什么特斯拉還使用包括雷達(dá)在內(nèi)的其他傳感器來檢測范圍和距離的原因。批評者說,相機(jī)仍然不能很好地看到以避免危險(xiǎn),尤其是在涉及天氣條件的情況下。他們需要能夠在任何類型的條件下準(zhǔn)確地看到,就像人類司機(jī)一樣。
如果自動(dòng)駕駛汽車要合法上路,安全將成為首要問題。使用這兩種系統(tǒng)的自動(dòng)駕駛汽車已經(jīng)發(fā)生了死亡事故。使用 Autopilot 的特斯拉司機(jī)曾發(fā)生過事故,包括在美國高速公路上發(fā)生的死亡事故。其他時(shí)候是因?yàn)榉中鸟{駛,因?yàn)檫@些汽車不是完全自動(dòng)駕駛的,仍然需要駕駛員的注意力。優(yōu)步在 2018 年成為新聞,當(dāng)時(shí)其一輛自動(dòng)駕駛汽車撞上了一名當(dāng)場死亡的行人。這些汽車還沒有完全自動(dòng)駕駛,因此駕駛員也可能會被忽視。這些都是自動(dòng)駕駛汽車發(fā)展的陷阱。
如果安全是我們的首要考慮,那么融合 LiDAR 和相機(jī)系統(tǒng)最佳元素的傳感器融合將是必要的。LiDAR 和其他傳感器(包括相機(jī))的組合可以為公共安全提供很多幫助。如果視覺系統(tǒng)(例如軟件、傳感器)對于公共安全而言變得更加準(zhǔn)確和可靠,則 LiDAR 可能變得不必要。畢竟,自動(dòng)駕駛汽車的主要原因之一是盡量減少人為錯(cuò)誤造成的事故。
自動(dòng)駕駛汽車中 LiDAR 和相機(jī)之間的共同點(diǎn)是軟件。這兩個(gè)系統(tǒng)都使用機(jī)器學(xué)習(xí)和神經(jīng)網(wǎng)絡(luò)等人工智能技術(shù)來分析數(shù)據(jù)。隨著算法變得更好,結(jié)果還應(yīng)該提高識別物體的準(zhǔn)確性,并使自動(dòng)駕駛汽車做出更好的決策。這可能意味著事故和安全駕駛之間的區(qū)別。
這不是一個(gè)有簡單答案的簡單問題。在關(guān)鍵決策方面,機(jī)器的思維方式與人類不同。這需要為軟件開發(fā)人員提供更多的數(shù)據(jù)和培訓(xùn)來改進(jìn)。當(dāng)前的基礎(chǔ)設(shè)施可能也需要修改,以適應(yīng)自動(dòng)駕駛汽車(例如 V2X)。除非自動(dòng)駕駛汽車顯示一致的數(shù)據(jù)表明使用一種技術(shù)而不是另一種技術(shù),否則爭論仍然存在。
交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會逐漸細(xì)分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會根據(jù)研究方向邀請進(jìn)入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會請出群,謝謝理解~