
目標(biāo)檢測(cè)中邊界框的回歸策略
極市導(dǎo)讀
?本文主要講述:1.無Anchor的目標(biāo)檢測(cè)算法:YOLOv1,CenterNet,CornerNet的邊框回歸策略;2.有Anchor的目標(biāo)檢測(cè)算法:SSD,YOLOv2,F(xiàn)aster R-CNN的邊框回歸策略。?>>加入極市CV技術(shù)交流群,走在計(jì)算機(jī)視覺的最前沿
寫在前面
無Anchor的目標(biāo)檢測(cè)算法邊框回歸策略
1. YOLOv1

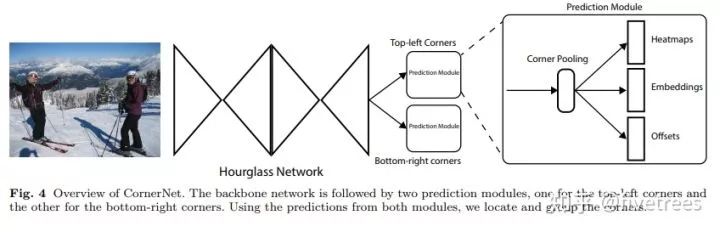
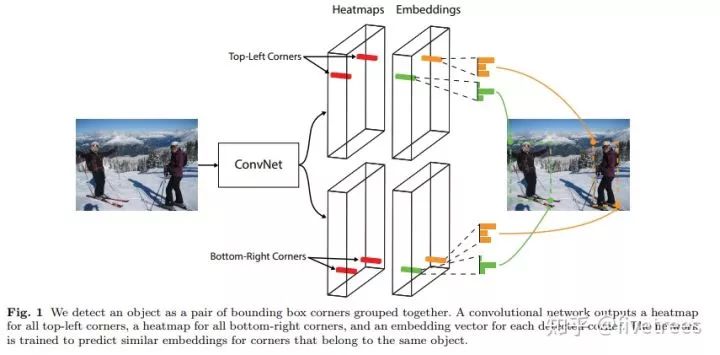
2. CornerNet
算法結(jié)構(gòu)
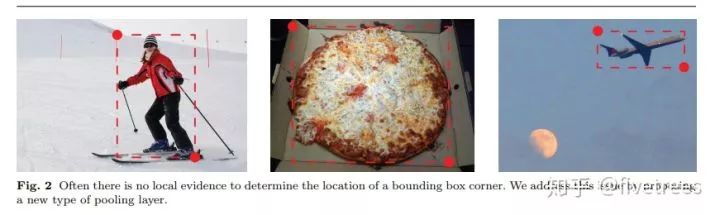
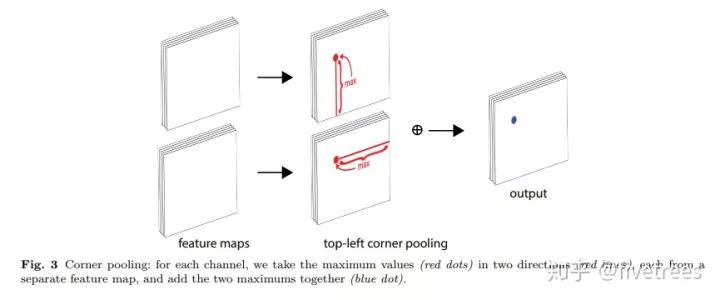
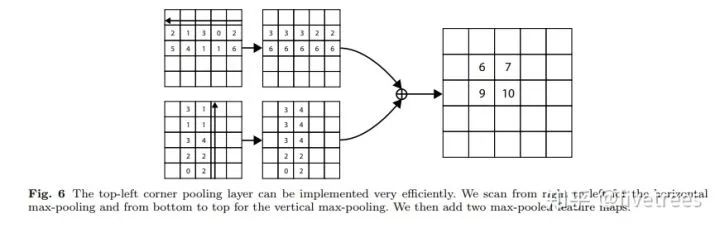
Corner poolin

Heatmaps
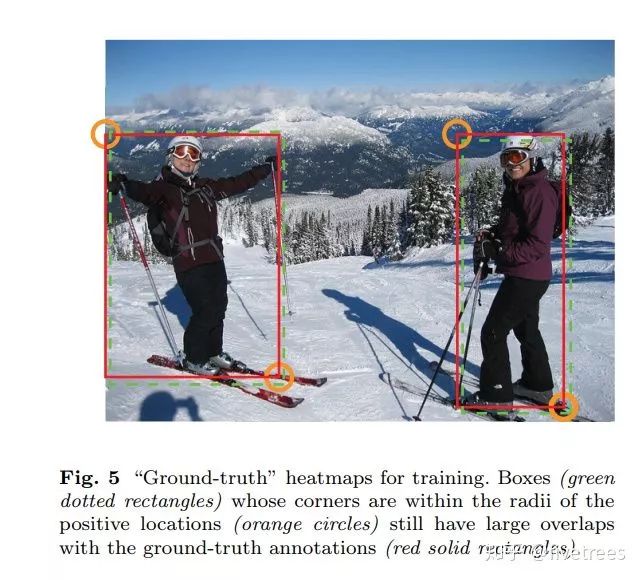


 為控制每個(gè)點(diǎn)的權(quán)重的超參數(shù),具體來說,參數(shù)用來控制難易分類樣本的損失權(quán)重(在文章中?為2,為4),pcij表示預(yù)測(cè)的heatmaps在第c個(gè)通道(類別c)的(i,j)位置的值,ycij表示對(duì)應(yīng)位置的ground truth,ycij=1時(shí)候的損失函數(shù)就是focal loss;ycij等于其他值時(shí)表示(i,j)點(diǎn)不是類別c的目標(biāo)角點(diǎn),照理說此時(shí)ycij應(yīng)該是0(大部分算法都是這樣處理的),但是這里ycij不是0,而是用基于ground truth角點(diǎn)的高斯分布計(jì)算得到,因此距離ground truth比較近的(i,j)點(diǎn)的ycij值接近1,這部分通過β參數(shù)控制權(quán)重,這是和Focal loss的差別。為什么對(duì)不同的負(fù)樣本點(diǎn)用不同權(quán)重的損失函數(shù)呢?這是因?yàn)榭拷黦round truth的誤檢角點(diǎn)組成的預(yù)測(cè)框仍會(huì)和ground truth有較大的重疊面積。
為控制每個(gè)點(diǎn)的權(quán)重的超參數(shù),具體來說,參數(shù)用來控制難易分類樣本的損失權(quán)重(在文章中?為2,為4),pcij表示預(yù)測(cè)的heatmaps在第c個(gè)通道(類別c)的(i,j)位置的值,ycij表示對(duì)應(yīng)位置的ground truth,ycij=1時(shí)候的損失函數(shù)就是focal loss;ycij等于其他值時(shí)表示(i,j)點(diǎn)不是類別c的目標(biāo)角點(diǎn),照理說此時(shí)ycij應(yīng)該是0(大部分算法都是這樣處理的),但是這里ycij不是0,而是用基于ground truth角點(diǎn)的高斯分布計(jì)算得到,因此距離ground truth比較近的(i,j)點(diǎn)的ycij值接近1,這部分通過β參數(shù)控制權(quán)重,這是和Focal loss的差別。為什么對(duì)不同的負(fù)樣本點(diǎn)用不同權(quán)重的損失函數(shù)呢?這是因?yàn)榭拷黦round truth的誤檢角點(diǎn)組成的預(yù)測(cè)框仍會(huì)和ground truth有較大的重疊面積。Offset
Embeddings
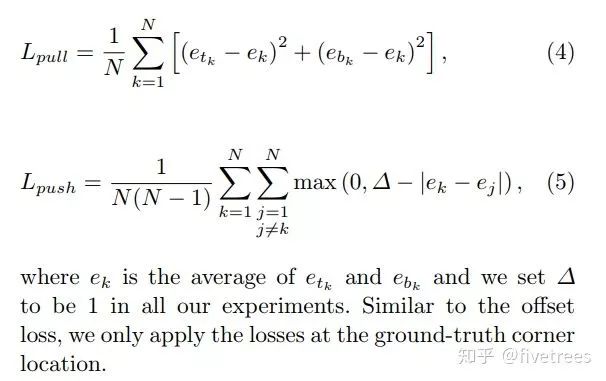
總損失函數(shù)

回歸策略
補(bǔ)充
3. CenterNet
與CornerNet對(duì)比
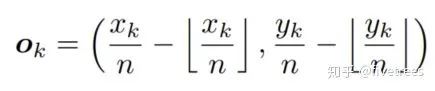
2、CerterNet中也采用了和CornerNet一樣的偏置(offset)預(yù)測(cè),這個(gè)偏置表示的是標(biāo)注信息從輸入圖像映射到輸出特征圖時(shí)由于取整操作帶來的坐標(biāo)誤差,只不過CornerNet中計(jì)算的是2個(gè)角點(diǎn)的offset,而CenterNet計(jì)算的是中心點(diǎn)的offset。這部分還有一個(gè)不同點(diǎn):損失函數(shù),在CornerNet中采用SmoothL1損失函數(shù)來監(jiān)督回歸值的計(jì)算,但是在CenterNet中發(fā)現(xiàn)用L1損失函數(shù)的效果要更好,差異這么大是有點(diǎn)意外的,這是其二。
3、CenterNet直接回歸目標(biāo)框尺寸,最后基于目標(biāo)框尺寸和目標(biāo)框的中心點(diǎn)位置就能得到預(yù)測(cè)框,這部分和CornerNet是不一樣的,因?yàn)镃ornerNet是預(yù)測(cè)2個(gè)角點(diǎn),所以需要判斷哪些角點(diǎn)是屬于同一個(gè)目標(biāo)的過程,在CornerNet中通過增加一個(gè)corner group任務(wù)預(yù)測(cè)embedding vector,最后基于embedding vector判斷哪些角點(diǎn)是屬于同一個(gè)框。而CenterNet是預(yù)測(cè)目標(biāo)的中心點(diǎn),所以將CornerNet中的corner group操作替換成預(yù)測(cè)目標(biāo)框的size(寬和高),這樣一來結(jié)合中心點(diǎn)位置就能確定目標(biāo)框的位置和大小了,這部分的損失函數(shù)依然采用L1損失,這是其三。
回歸策略
有Anchor的目標(biāo)檢測(cè)算法邊框回歸策略
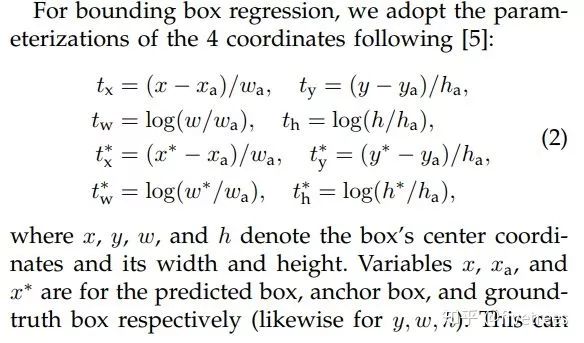
1. Faster R-CNN
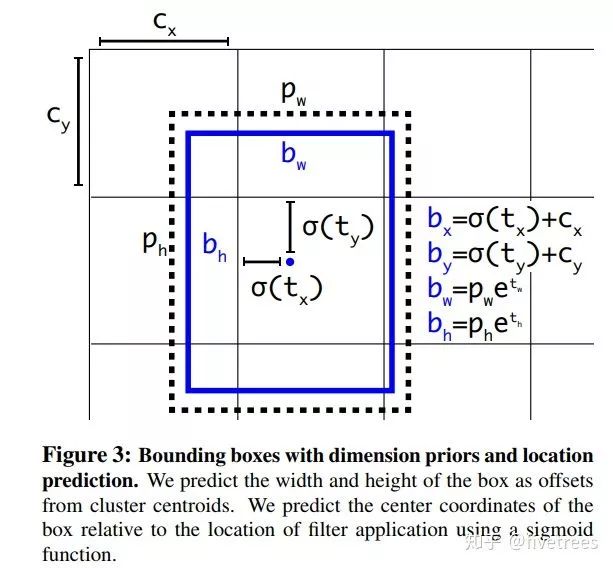
2. YOLOv2
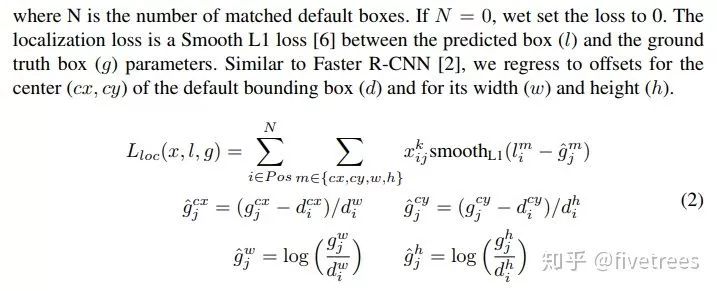
3. SSD
論文:https://arxiv.org/pdf/1512.02325.pdf
參考文獻(xiàn)
如果覺得有用,就請(qǐng)分享到朋友圈吧!
公眾號(hào)后臺(tái)回復(fù)“CVPR21檢測(cè)”獲取CVPR2021目標(biāo)檢測(cè)論文下載~

#?CV技術(shù)社群邀請(qǐng)函?#

備注:姓名-學(xué)校/公司-研究方向-城市(如:小極-北大-目標(biāo)檢測(cè)-深圳)
即可申請(qǐng)加入極市目標(biāo)檢測(cè)/圖像分割/工業(yè)檢測(cè)/人臉/醫(yī)學(xué)影像/3D/SLAM/自動(dòng)駕駛/超分辨率/姿態(tài)估計(jì)/ReID/GAN/圖像增強(qiáng)/OCR/視頻理解等技術(shù)交流群
每月大咖直播分享、真實(shí)項(xiàng)目需求對(duì)接、求職內(nèi)推、算法競(jìng)賽、干貨資訊匯總、與?10000+來自港科大、北大、清華、中科院、CMU、騰訊、百度等名校名企視覺開發(fā)者互動(dòng)交流~
評(píng)論
圖片
表情