
目標(biāo)檢測(cè)中的預(yù)測(cè)框回歸優(yōu)化之IOU、GIOU、DIOU、CIOU和EIOU
目標(biāo)檢測(cè)分為:目標(biāo)分類(lèi)+目標(biāo)定位兩個(gè)任務(wù)。目標(biāo)分類(lèi)就是要對(duì)該目標(biāo)進(jìn)行分類(lèi)以確定該目標(biāo)屬于什么類(lèi)別以及其屬于該類(lèi)別的置信度。目標(biāo)定位是要在圖像中確定目標(biāo)的位置,輸出其在圖像中的坐標(biāo)信息。目標(biāo)定位依賴(lài)一個(gè)邊界框回歸模塊去定位目標(biāo)。邊界框回歸是指使用矩形邊界框去預(yù)測(cè)目標(biāo)對(duì)象在圖像中的位置,然后不斷細(xì)化預(yù)測(cè)邊界框的位置。
不斷細(xì)化預(yù)測(cè)的邊界框的位置是通過(guò)定義邊界框回歸損失函數(shù)、計(jì)算回歸損失值Loss然后進(jìn)行反向梯度下降實(shí)現(xiàn)的。一開(kāi)始定義計(jì)算邊界框回歸的損失函數(shù)使用的還是基于L1、L2距離范數(shù)。基于L1范數(shù)定義的邊界框損失函數(shù)是指預(yù)測(cè)邊界框的四個(gè)點(diǎn)P(,)坐標(biāo)和真實(shí)邊界框?qū)?yīng)的四個(gè)點(diǎn)G(,橫坐標(biāo)和縱坐標(biāo)分別計(jì)算絕對(duì)值之差然后相加。基于L2范數(shù)定義的邊界框損失函數(shù)是指預(yù)測(cè)邊界框的四個(gè)點(diǎn)P(,)坐標(biāo)和真實(shí)邊界框?qū)?yīng)的四個(gè)點(diǎn)G(,)橫坐標(biāo)和縱坐標(biāo)分別計(jì)算平方和之差然后相加。
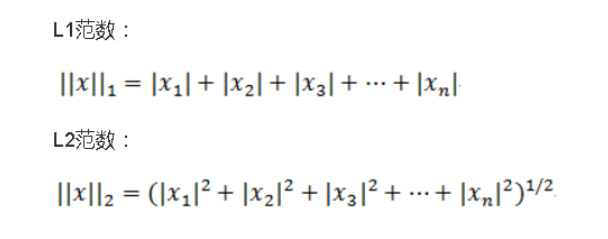
L1范數(shù)和L2范數(shù)定義的邊界框回歸的損失函數(shù)Loss都是將預(yù)測(cè)的bbox和真實(shí)框bbox的四個(gè)點(diǎn)分別求loss值然后相加,并沒(méi)有考慮靠坐標(biāo)之間的相關(guān)性。
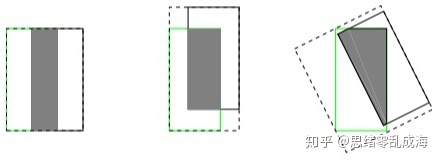
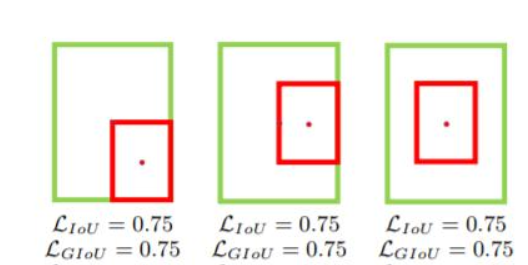
如下圖所示,綠色框?yàn)檎鎸?shí)框,黑色框?yàn)轭A(yù)測(cè)的邊界框。先忽略GIOU那一行,可以看出,預(yù)測(cè)框和真實(shí)框三種不同位置和不同區(qū)域的相交,最終基于L1范數(shù)和L2范數(shù)定義的邊界框回歸損失函數(shù)在計(jì)算得到的邊界框回歸損失Loss值都是一樣的。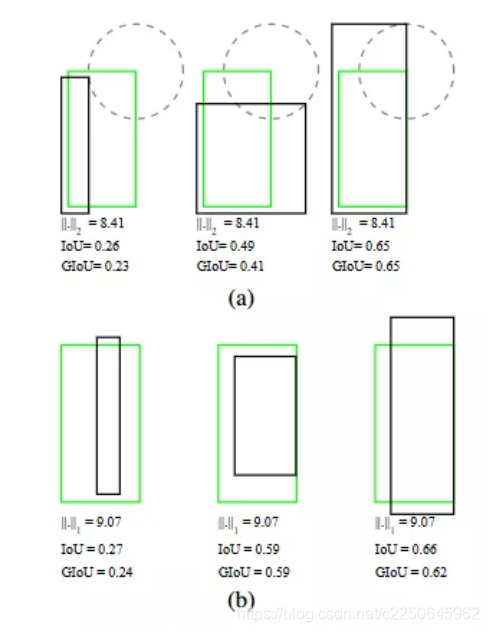 而在肉眼觀察,圖(a)和圖(b)中最后一種預(yù)測(cè)的框和真實(shí)框重合明顯好于前面兩種,而這是基于L1范數(shù)和L2范數(shù)定義的邊界框回歸損失函數(shù)計(jì)算得到邊界框回歸損失值是無(wú)法判別的。而這一點(diǎn)可以通過(guò)IOU定義的損失函數(shù)計(jì)算的損失值很好的區(qū)別出來(lái),因此后來(lái)提出來(lái)了基于交并比的IOU定義的邊界框回歸損失函數(shù)。
而在肉眼觀察,圖(a)和圖(b)中最后一種預(yù)測(cè)的框和真實(shí)框重合明顯好于前面兩種,而這是基于L1范數(shù)和L2范數(shù)定義的邊界框回歸損失函數(shù)計(jì)算得到邊界框回歸損失值是無(wú)法判別的。而這一點(diǎn)可以通過(guò)IOU定義的損失函數(shù)計(jì)算的損失值很好的區(qū)別出來(lái),因此后來(lái)提出來(lái)了基于交并比的IOU定義的邊界框回歸損失函數(shù)。
開(kāi)始之前
注意本文中的用詞: 完全重合(預(yù)測(cè)框和真實(shí)框大小一模一樣)、部分重合(相交)、水平和垂直方向上的重合(閉包,預(yù)測(cè)框包含在真實(shí)框內(nèi)部)、不相交(完全不重合)。
1 IOU計(jì)算和損失函數(shù)
**邊界框回歸損失函數(shù)(IoU Loss)**,它是將邊界框的4個(gè)點(diǎn)構(gòu)成的box看成一個(gè)整體進(jìn)行回歸,考慮到了坐標(biāo)之間的相關(guān)性。IoU 的全稱(chēng)為交并比(Intersection over Union),其計(jì)算是 “預(yù)測(cè)的邊框” 和 “真實(shí)的邊框” 的交集和并集的比值,IOU計(jì)算公式如下所示:
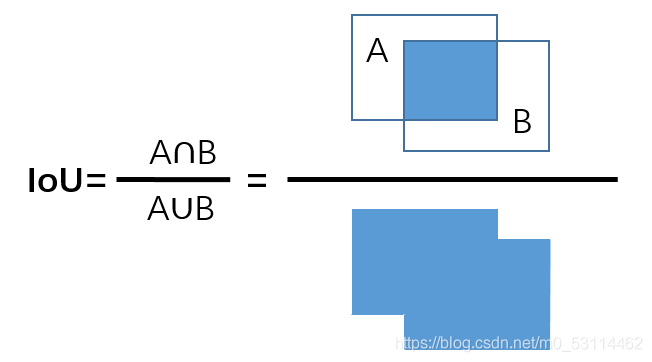 從上圖可以看出IOU的值域?yàn)椤?,1】之間,添加之前的原文鏈接。
從上圖可以看出IOU的值域?yàn)椤?,1】之間,添加之前的原文鏈接。
Iou-loss本身是是從人臉檢測(cè)的paper引入進(jìn)來(lái)的(https://arxiv.org/pdf/1608.01471.pdf),如下圖所示: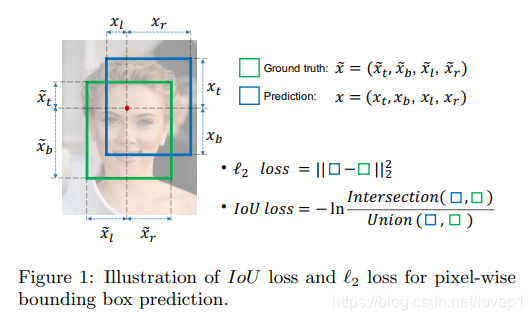
IOU回歸損失Loss算法計(jì)算流程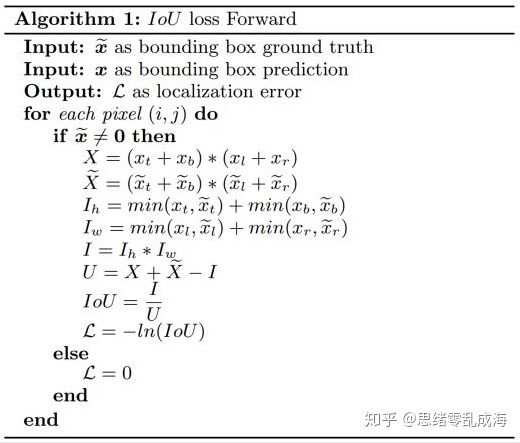 其中, 是預(yù)測(cè)邊界框(Bounding box)的面積, 是真實(shí)邊界框(Bounding box)的面積, 是兩個(gè)區(qū)域的交集, ? 是兩個(gè)區(qū)域的并集。 是對(duì)IOU的交叉熵?fù)p失函數(shù),是對(duì)IOU取負(fù)對(duì)數(shù)-ln。
其中, 是預(yù)測(cè)邊界框(Bounding box)的面積, 是真實(shí)邊界框(Bounding box)的面積, 是兩個(gè)區(qū)域的交集, ? 是兩個(gè)區(qū)域的并集。 是對(duì)IOU的交叉熵?fù)p失函數(shù),是對(duì)IOU取負(fù)對(duì)數(shù)-ln。
在實(shí)際使用中,實(shí)際很多IoU的損失Loss常常被定義為L(zhǎng)oss(IoU) = 1-IoU。它們完全重合時(shí),IoU就是1,那么對(duì)于Loss來(lái)說(shuō),Loss是越小越好,說(shuō)明他們重合度高,所以IoU Loss就可以簡(jiǎn)單表示為 1- IoU。
邊界框box位置的修正是通過(guò)對(duì)IOU的損失函數(shù)的損失值loss進(jìn)行反向傳播迭代計(jì)算的。
IOU回歸的優(yōu)缺點(diǎn)
1.當(dāng)預(yù)測(cè)框和真實(shí)框完全不相交時(shí),IOU=0,此時(shí)損失函數(shù)-lnIOU不可導(dǎo),因此IoU Loss 無(wú)法優(yōu)化兩個(gè)框不相交的情況。這時(shí)的IOU不能反映真實(shí)框和預(yù)測(cè)的邊界框距離的遠(yuǎn)近。也因?yàn)椴豢蓪?dǎo),所以沒(méi)有梯度回傳,無(wú)法進(jìn)行下一步訓(xùn)練。
2.預(yù)測(cè)框和真實(shí)框無(wú)法反映相交程度的大小和好壞。如下圖所示,這三種預(yù)測(cè)框和真實(shí)框重合的情況下,三者的IOU值相同,IOU不能反映兩個(gè)框是如何相交的,直觀上看第三種重合方式是最差的,但是IOU是無(wú)法分辨的。
3.IOU Loss解決了L1和L2范數(shù)定義的邊界框回歸損失函數(shù)的系列變量(邊界框的四個(gè)點(diǎn))相互獨(dú)立和不具有尺度不變性的兩大問(wèn)題。相互獨(dú)立是指L1范數(shù)和L2范數(shù)定義的損失函數(shù):先獨(dú)立地求出4個(gè)點(diǎn)的損失Loss,然后進(jìn)行相加,這種做法假設(shè)了邊界框的4個(gè)點(diǎn)是相互獨(dú)立的,但實(shí)際上應(yīng)該是有一定相關(guān)性的,因?yàn)檫吔缈虻?個(gè)點(diǎn)都依賴(lài)于同一個(gè)目標(biāo)。尺度不變性則指基于L1范數(shù)和L2范數(shù)的大邊界框的L2損失通常會(huì)大于小邊界框的損失,這使得在網(wǎng)絡(luò)訓(xùn)練過(guò)程中,網(wǎng)絡(luò)會(huì)更加注重大邊界框的定位,忽視小邊界框的定位,最終導(dǎo)致模型對(duì)小目標(biāo)的檢測(cè)性能比較差。
2 GIOU計(jì)算和損失函數(shù)
GIOU的誕生就是為了解決IOU定義的損失函數(shù)無(wú)法優(yōu)化預(yù)測(cè)框和真實(shí)框不相交的情況、和不知道預(yù)測(cè)框和真實(shí)框如何相交的兩個(gè)問(wèn)題。斯坦福學(xué)者在2019年的文章《Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression》中提出了GIOU Loss,在IOU的基礎(chǔ)上引入了預(yù)測(cè)框和真實(shí)框的最小外接矩形。
GIOU定義:
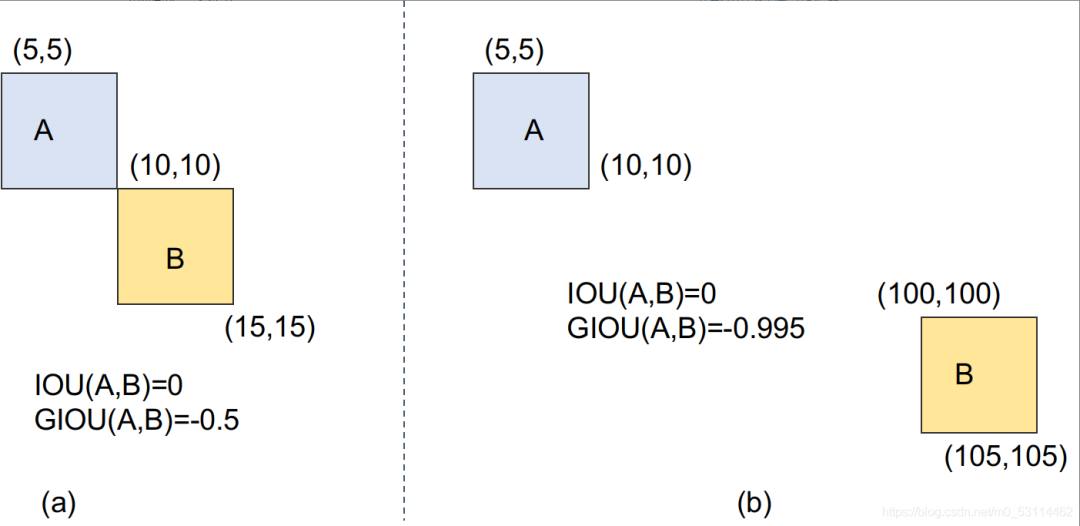
如下圖,假設(shè)紫色A為真實(shí)框,B為預(yù)測(cè)的邊界框,則GIOU計(jì)算公式如下:
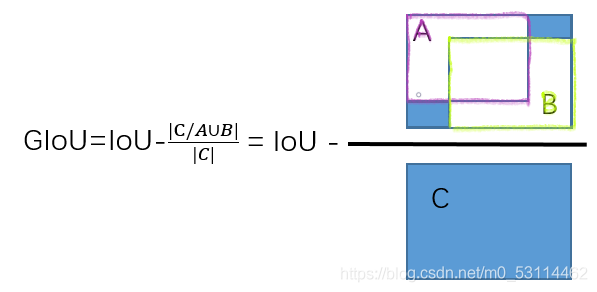
其中藍(lán)色閉包框C為能包含預(yù)測(cè)框和真實(shí)框最小的外接矩形框。這里C \ (A ∪ B)的意思是閉包框C的面積-A∪B的面積所剩余的面積。從計(jì)算公式可以看出GIOU不僅關(guān)注重疊區(qū)域,還關(guān)注其他的非重合區(qū)域,能更好的反映預(yù)測(cè)框和真實(shí)框的重合度。
GIOU邊界框回歸損失函數(shù):
GIoU和IoU一樣,可以作為損失函數(shù),Loss(GIoU) = 1 - GIoU。我們知道IOU的值域?yàn)閇0,1],而GIoU有對(duì)稱(chēng)區(qū)間,取值范圍[-1,1]。

GIOU邊界框回歸的優(yōu)缺點(diǎn)
1.GIoU能夠更好地反映預(yù)測(cè)框和真實(shí)框相交的情況,如下圖所示,雖然兩種情況下計(jì)算得到的IOU一致,但是(a)中兩個(gè)框相交的更為整齊,因此(a)GIOU要比(b)中大。
GIoU考慮到了 IoU 沒(méi)有考慮到的預(yù)測(cè)框和真實(shí)框的非重疊區(qū)域,能夠反映出真實(shí)框A,預(yù)測(cè)框B重疊的方式。
2.當(dāng)預(yù)測(cè)框和真實(shí)框不重合時(shí),不重合度越高GIOU的值越接近于-1.此時(shí)的GIOU等于
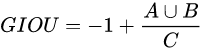 ,最大化GIOU就是指使得預(yù)測(cè)框和真實(shí)框不斷地靠近,以此達(dá)到回歸優(yōu)化邊界框的目的。
,最大化GIOU就是指使得預(yù)測(cè)框和真實(shí)框不斷地靠近,以此達(dá)到回歸優(yōu)化邊界框的目的。3.當(dāng)預(yù)測(cè)框和真實(shí)框完全重合時(shí)(預(yù)測(cè)框在真實(shí)框的內(nèi)部),IoU和GIoU的損失值Loss都一樣,此時(shí)GIoU退化為IoU,GIOU=IOU,最終還是無(wú)法區(qū)分預(yù)測(cè)框和真實(shí)框的位置關(guān)系,也導(dǎo)致此時(shí)的邊界框回歸收斂很慢。
3 DIOU計(jì)算和損失函數(shù)
基于GIoU的缺點(diǎn)(當(dāng)預(yù)測(cè)框和真實(shí)框完全重合時(shí),GIOU=IOU,導(dǎo)致此時(shí)的邊界框回歸收斂很慢),因此DIoU被提出。其論文為:Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression。
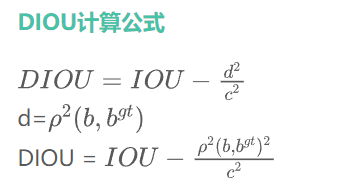
DIOU計(jì)算公式
d=
DIOU =
其中d表示預(yù)測(cè)框與真實(shí)框中心點(diǎn)的歐式距離,c表示覆蓋預(yù)測(cè)框與真實(shí)框的最小閉合框的對(duì)角線長(zhǎng)度。
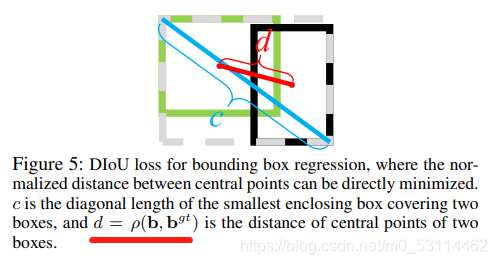 上圖中綠色框?yàn)檎鎸?shí)框,黑色框?yàn)轭A(yù)測(cè)框,灰色框?yàn)槟馨A(yù)測(cè)框和真實(shí)框的最小外界矩形框,b 和?分別代表真實(shí)框和預(yù)測(cè)框的中心點(diǎn),代表的是計(jì)算預(yù)測(cè)框和邊界框兩中心點(diǎn)間的歐式距離。
上圖中綠色框?yàn)檎鎸?shí)框,黑色框?yàn)轭A(yù)測(cè)框,灰色框?yàn)槟馨A(yù)測(cè)框和真實(shí)框的最小外界矩形框,b 和?分別代表真實(shí)框和預(yù)測(cè)框的中心點(diǎn),代表的是計(jì)算預(yù)測(cè)框和邊界框兩中心點(diǎn)間的歐式距離。
DIOU回歸損失函數(shù)
與IOU、GIoU 定義損失函數(shù)loss類(lèi)似,Loss(DIOU)= 1-DIOU,計(jì)算公式如下所示:
 此處的 ,表示預(yù)測(cè)框和邊界框中心點(diǎn)的間的歐式距離的平方。當(dāng)預(yù)測(cè)框和真實(shí)框完全重合時(shí),L(GIOU)=L(GIOU)=L(DIOU)=0;完全重疊是指預(yù)測(cè)框和真實(shí)框大小一模一樣。
此處的 ,表示預(yù)測(cè)框和邊界框中心點(diǎn)的間的歐式距離的平方。當(dāng)預(yù)測(cè)框和真實(shí)框完全重合時(shí),L(GIOU)=L(GIOU)=L(DIOU)=0;完全重疊是指預(yù)測(cè)框和真實(shí)框大小一模一樣。
DIOU邊界框回歸的優(yōu)缺點(diǎn)
1.當(dāng)預(yù)測(cè)框和真實(shí)框不重疊時(shí),也就是不相交時(shí),DIOU=,可以通過(guò)最小化預(yù)測(cè)框和真實(shí)框的兩個(gè)中心點(diǎn)的距離為預(yù)測(cè)框提供移動(dòng)方向。
2.DIoU loss通過(guò)最小化預(yù)測(cè)框和真實(shí)框中心點(diǎn)的距離來(lái)進(jìn)行收斂,而GIOU loss優(yōu)化的是預(yù)測(cè)框和真實(shí)框之間的面積(減少外界包圍框的面積)來(lái)進(jìn)行收斂,因此DIOU loss 比GIoU loss回歸收斂要快得多。即使預(yù)測(cè)框和真實(shí)框在水平和垂直兩個(gè)方向上同時(shí)重合時(shí)(即預(yù)測(cè)框在真實(shí)框內(nèi)部的時(shí)候),也可以通過(guò)最小化中心點(diǎn)的距離,來(lái)繼續(xù)進(jìn)行水平方向和垂直方向的預(yù)測(cè)框回歸。而此時(shí)這種情況下的GIOU=IOU,GIOU損失退化為了IOU損失,基本上很難收斂。
3.DIoU還可以替換普通的IoU評(píng)價(jià)策略,應(yīng)用于NMS中,使得NMS得到的結(jié)果更加合理和有效。
4 CIOU計(jì)算和損失函數(shù)
雖然DIOU解決了當(dāng)預(yù)測(cè)框和真實(shí)框相交(部分重疊)、預(yù)測(cè)框包含在真實(shí)框內(nèi)部?jī)煞N情況下的預(yù)測(cè)框回歸收斂問(wèn)題,但是這都是通過(guò)最小化預(yù)測(cè)框和真實(shí)框兩個(gè)中心點(diǎn)的距離實(shí)現(xiàn)的,因此為了加快這兩種情況下的預(yù)測(cè)框回歸收斂更快、更準(zhǔn)確,因此提出了CIOU。
CIOU計(jì)算公式
一個(gè)好的目標(biāo)框回歸損失應(yīng)該考慮三個(gè)重要的幾何因素:重疊面積、中心點(diǎn)距離、長(zhǎng)寬比。預(yù)測(cè)框和目標(biāo)框之間的長(zhǎng)寬比的一致性也是極其重要的,因此CIOU在DIOU的基礎(chǔ)上添加了一個(gè)邊界框box長(zhǎng)寬比的懲罰項(xiàng),CIOU的損失函數(shù)計(jì)算公式如下:
 因此CIOU等于
因此CIOU等于
CIOU邊界框損失函數(shù)
CIOU和IOU、GIOU、CIOU損失函數(shù)設(shè)置一樣,因此CIOU的損失函數(shù)為L(zhǎng)oss(CIOU)=1-CIOU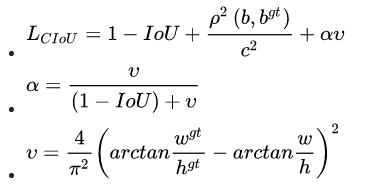
其中α是用于平衡比例的參數(shù),v用來(lái)衡量預(yù)測(cè)框和真實(shí)框的寬和高之間的比例一致性。b代表預(yù)測(cè)框,代表真實(shí)框,代表真實(shí)框的寬和高,w和h代表預(yù)測(cè)框的寬和高。
CIOU邊界框回歸的優(yōu)點(diǎn)
從CIOU邊界框損失函數(shù)可以看出,它包含了預(yù)測(cè)框和真實(shí)框重疊區(qū)域面積的IOU損失、預(yù)測(cè)框和真實(shí)框中心點(diǎn)之間歸一化后的距離損失、預(yù)測(cè)框和真實(shí)框的寬和高的縱橫比損失三個(gè)部分。CIOU邊界框損失函數(shù)通過(guò)迭代可以將預(yù)測(cè)框不斷向真實(shí)框移動(dòng),還盡可能的保證了預(yù)測(cè)框和真實(shí)框的寬和高的縱橫比更為接近,加快了預(yù)測(cè)框的回歸收斂速度。
CIOU邊界框回歸的問(wèn)題(缺點(diǎn))
CIOU Loss雖然考慮了邊界框回歸:預(yù)測(cè)框和真實(shí)框重疊面積、預(yù)測(cè)框和真實(shí)框的中心點(diǎn)距離、預(yù)測(cè)框和真實(shí)框高和寬的縱橫比三個(gè)方面。從上面的公式,我們可以看出CIoU使用的是預(yù)測(cè)框和真實(shí)框的寬和高的相對(duì)比例,并不是寬和高的值。根據(jù) 縱橫比v的定義,可以看出只要預(yù)測(cè)框的寬和高和真實(shí)框的比例滿足:

那么CIoU中的添加的相對(duì)比例的懲罰項(xiàng)便不再起作用。從預(yù)測(cè)框的寬和高的相對(duì)于v的公式: 可以推導(dǎo)出:
可以推導(dǎo)出: 表明預(yù)測(cè)框 w 和 h 的梯度值 和 是具有相反的符號(hào)。這個(gè)相反的符號(hào)在訓(xùn)練的過(guò)程中問(wèn)題就很大,它表明預(yù)測(cè)框回歸過(guò)程中w和h其中某一個(gè)值增大時(shí),另外一個(gè)值必須減小,預(yù)測(cè)框回歸過(guò)程中它的w和h不能同時(shí)保持同增或者同減。
表明預(yù)測(cè)框 w 和 h 的梯度值 和 是具有相反的符號(hào)。這個(gè)相反的符號(hào)在訓(xùn)練的過(guò)程中問(wèn)題就很大,它表明預(yù)測(cè)框回歸過(guò)程中w和h其中某一個(gè)值增大時(shí),另外一個(gè)值必須減小,預(yù)測(cè)框回歸過(guò)程中它的w和h不能同時(shí)保持同增或者同減。
CIOU總結(jié):CIOU將邊界框的縱橫比作為懲罰項(xiàng)加入到邊界框損失函數(shù)中,一定程度上可以加快預(yù)測(cè)框的回歸收斂過(guò)程,但是一旦收斂到預(yù)測(cè)框和真實(shí)框的寬和高呈現(xiàn)線行比例時(shí),就會(huì)導(dǎo)致預(yù)測(cè)框回歸時(shí)的寬和高不能同時(shí)增大或者減少。
5 IOU、GIOU、DIOU、CIOU損失函數(shù)對(duì)比
下圖顯示了幾種IoU損失函數(shù)在不同迭代次數(shù)情況下的回歸誤差曲線: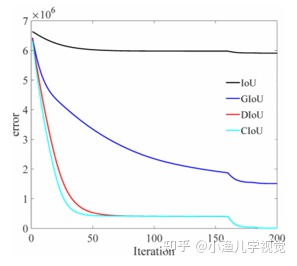
由于IoU損失只有在預(yù)測(cè)框與真實(shí)框有重疊的情況下才有效,因此收斂得很慢,得到的預(yù)測(cè)框與真實(shí)框之間的誤差也很大; GIoU損失通過(guò)增加預(yù)測(cè)框的大小慢慢移動(dòng)到與真實(shí)框重疊的區(qū)域來(lái)幫助處理非重疊的情況,其迭代過(guò)程收斂得比較緩慢,尤其是預(yù)測(cè)框與真實(shí)框的縱橫比相差很大的時(shí)候,這種情況下GIoU回歸得到的預(yù)測(cè)框與真實(shí)框之間的誤差也比較大。 DIoU 和 CIoU損失可以收斂得比IoU和GIoU更快,特別是CIoU收斂速度和回歸的精度都比使用它之前幾種損失函數(shù)得到的結(jié)果更好。
下圖是在YOLOv3上幾種邊界框回歸損失函數(shù)對(duì)模型提升效果對(duì)比圖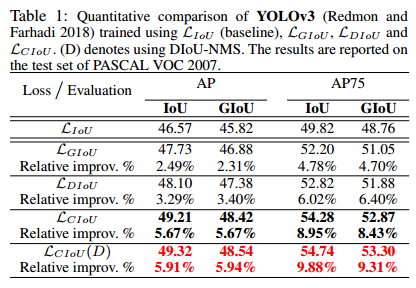
總結(jié)
IOU解決了L1、L2初步預(yù)測(cè)框和真實(shí)框三種不同位置和不同區(qū)域的相交時(shí)的判斷,但是沒(méi)有解決預(yù)測(cè)框和真實(shí)框無(wú)法反映相交程度的大小和好壞。當(dāng)預(yù)測(cè)框在真實(shí)框內(nèi)部時(shí)的不同位置時(shí),IOU是一樣的,無(wú)法繼續(xù)優(yōu)化。預(yù)測(cè)框和真實(shí)框不相交時(shí),IOU=0,也沒(méi)有辦法繼續(xù)進(jìn)行優(yōu)化。 GIOU通過(guò)預(yù)測(cè)框和真實(shí)框的最小外接閉包矩形解決了IOU,當(dāng)預(yù)測(cè)框和真實(shí)框不相交時(shí)無(wú)法繼續(xù)優(yōu)化問(wèn)題,但是沒(méi)有解決當(dāng)預(yù)測(cè)框在真實(shí)框內(nèi)部不同位置時(shí)的優(yōu)化問(wèn)題。 DIOU通過(guò)直接優(yōu)化預(yù)測(cè)框和真實(shí)框兩個(gè)中心點(diǎn)的距離和兩個(gè)框的最小外接矩形對(duì)角線的距離解決了GIOU,當(dāng)預(yù)測(cè)框在真實(shí)框內(nèi)部不同位置時(shí)的回歸收斂問(wèn)題。 CIOU通過(guò)在DIOU的基礎(chǔ)上添加了預(yù)測(cè)框和真實(shí)框的寬高縱橫比的懲罰項(xiàng),加快了預(yù)測(cè)框和真實(shí)框回歸收斂的速度。
6 EIOU計(jì)算和損失函數(shù)
CIOU損失,在DIOU損失的基礎(chǔ)上添加了衡量預(yù)測(cè)框和真實(shí)框縱橫比v,在一定程度上可以加快預(yù)測(cè)框的回歸速度,但是存在的問(wèn)題是預(yù)測(cè)框回歸過(guò)程中,一旦預(yù)測(cè)框和真實(shí)框的寬高縱橫比呈現(xiàn)線性比例時(shí),預(yù)測(cè)框w和h就不能同時(shí)增加或者減少,就不能繼續(xù)進(jìn)行回歸優(yōu)化了。
2021年中科院提出了EIOU,論文:《Focal and Efficient IOU Loss for Accurate Bounding Box Regression》, EIOU是在CIOU的懲罰項(xiàng)基礎(chǔ)上將預(yù)測(cè)框和真實(shí)框的縱橫比的影響因子拆開(kāi),分別計(jì)算預(yù)測(cè)框和真實(shí)框的長(zhǎng)和寬,來(lái)解決CIOU存在的問(wèn)題。
EIOU回歸損失函數(shù)
CIOU回歸損失Loss(CIOU):EIOU回歸損失Loss(EIOU): 其中 和 ? 是覆蓋預(yù)測(cè)框真實(shí)框的最小外接框的寬度和高度。
其中 和 ? 是覆蓋預(yù)測(cè)框真實(shí)框的最小外接框的寬度和高度。
EIOU損失函數(shù)公式我們可以看出,EIOU損失函數(shù)包含三個(gè)部分:預(yù)測(cè)框和真實(shí)框的重疊損失,預(yù)測(cè)框和真實(shí)框的中心距離損失,預(yù)測(cè)框和真實(shí)框的寬和高損失。EIOU損失的前兩部分延續(xù)CIOU中的方法,但是寬高損失直接使預(yù)測(cè)框與真實(shí)框的寬度和高度之差最小,使得收斂速度更快。
下圖是CIOU和EIOU損失預(yù)測(cè)框的迭代過(guò)程對(duì)比圖,紅色框和綠色框就是預(yù)測(cè)框的回歸過(guò)程,藍(lán)色框是真實(shí)框,黑色框是預(yù)先設(shè)定的錨框,可以看出CIOU的問(wèn)題是寬和高不能同時(shí)增大或者減少,而EIOU可以。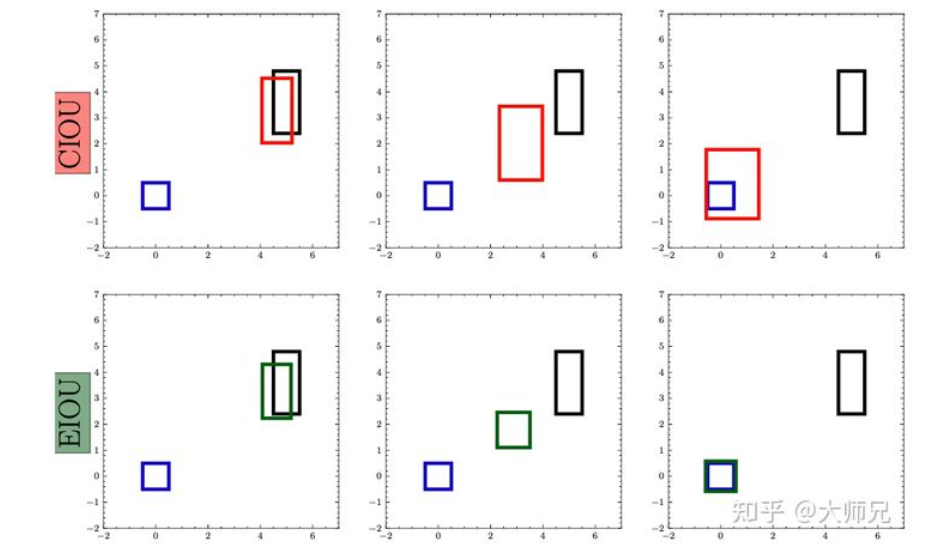
EIOU回歸損失的優(yōu)點(diǎn)
1.將縱橫比的損失項(xiàng)拆分成預(yù)測(cè)的寬高分別與最小外接框?qū)捀叩牟钪担铀倭祟A(yù)測(cè)框的收斂、提高了預(yù)測(cè)框的回歸精度。
此外在這篇論文《Focal and Efficient IOU Loss for Accurate Bounding Box Regression》中引入的Focal-EIoU Loss,是指對(duì)EIOU損失(Loss(EIOU)中進(jìn)行加權(quán)處理。
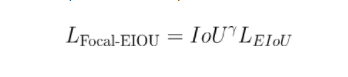 其中,γ為控制異常值抑制程度的參數(shù)。
其中,γ為控制異常值抑制程度的參數(shù)。
Focal-EIoU Loss與傳統(tǒng)的Focal Loss有一定的區(qū)別,傳統(tǒng)的Focal Loss針對(duì)越困難的樣本損失越大,起到的是困難樣本挖掘的作用;而Focal-EIoU Loss:和真實(shí)框IOU越高的,預(yù)測(cè)框的損失越大。這就相當(dāng)于加權(quán)作用,給越好的回歸目標(biāo)一個(gè)越大的損失,有助于提高預(yù)測(cè)框的回歸精度。
因?yàn)樵谀繕?biāo)檢測(cè)中,大部分最開(kāi)始根據(jù)預(yù)先設(shè)定的錨框得到的預(yù)測(cè)框都和ground truth(真實(shí)框)的IoU不大,這一部分叫做低質(zhì)量樣本,而在低質(zhì)量樣本上的訓(xùn)練容易造成損失值的劇烈波動(dòng)。而Focal-EIoU Loss的提出目標(biāo)便是解決高低質(zhì)量樣本類(lèi)別不平衡的問(wèn)題,也就是說(shuō)減少與真實(shí)框重疊較少的大量預(yù)先設(shè)定的錨框而得到的預(yù)測(cè)框的損失值,減少其對(duì)預(yù)測(cè)框回歸優(yōu)化過(guò)程中的貢獻(xiàn),使預(yù)測(cè)框回歸過(guò)程專(zhuān)注于高質(zhì)量錨框->(也就是和真實(shí)框IOU比較大的預(yù)先設(shè)定的錨框得到的預(yù)測(cè)框)。
傳統(tǒng)的Focal Loss:,點(diǎn)擊跳轉(zhuǎn)。Focal loss是最初由何愷明提出的,最初用于圖像領(lǐng)域解決數(shù)據(jù)不平衡造成的模型性能問(wèn)題。傳統(tǒng)Focal Loss計(jì)算公式如下: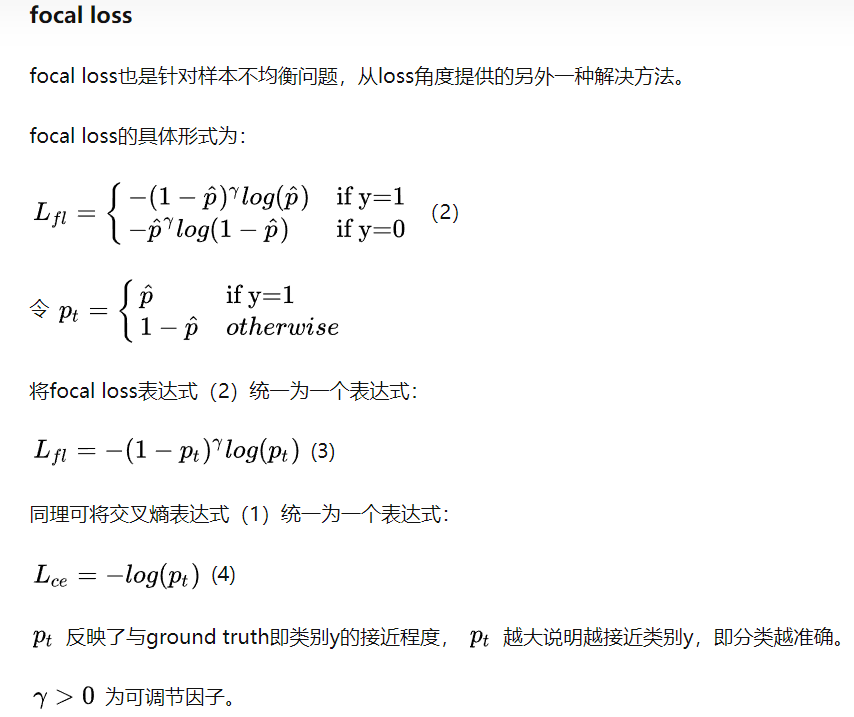 但是EIOU的論文作者嘗試直接將EIOU代替,發(fā)現(xiàn)不太好,就改成了Focal-EIoU Loss:LEIOU的形式,也就是最終論文中出現(xiàn)的Focal-EIoU Loss。
但是EIOU的論文作者嘗試直接將EIOU代替,發(fā)現(xiàn)不太好,就改成了Focal-EIoU Loss:LEIOU的形式,也就是最終論文中出現(xiàn)的Focal-EIoU Loss。
終極總結(jié)
預(yù)測(cè)框回歸的三大幾何因素:預(yù)測(cè)框和真實(shí)框的重疊面積、預(yù)測(cè)框和真實(shí)框的中心點(diǎn)距離、預(yù)測(cè)框和真實(shí)框的寬和高的縱橫比(寬和高的比例、還要考慮寬和高的差異)。
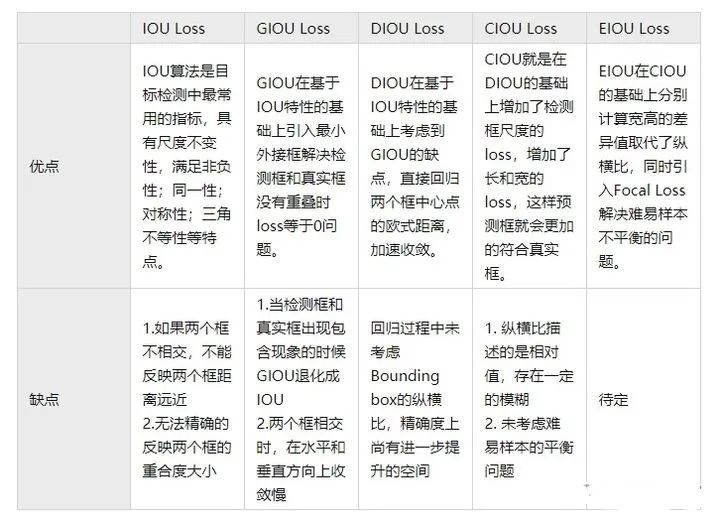
IOU Loss:考慮了重疊面積,歸一化坐標(biāo)尺度; GIOU Loss:考慮了重疊面積,基于IOU解決邊界框不相交時(shí)loss等于0的問(wèn)題; DIOU Loss:考慮了重疊面積和中心點(diǎn)距離,基于IOU解決GIOU收斂慢的問(wèn)題; CIOU Loss:考慮了重疊面積、中心點(diǎn)距離、縱橫比,基于DIOU提升回歸精確度; EIOU Loss:考慮了重疊面積,中心點(diǎn)距離、長(zhǎng)寬邊長(zhǎng)真實(shí)差,基于CIOU解決了縱橫比的模糊定義,并添加Focal Loss解決預(yù)測(cè)框回歸中的樣本不平衡問(wèn)題。
參考資料:
https://blog.csdn.net/c2250645962/article/details/106053242 https://blog.csdn.net/weixin_41560402/article/details/106007224 https://blog.csdn.net/m0_53114462/article/details/117398110 https://blog.csdn.net/qiu931110/article/details/103330107 https://blog.csdn.net/lovep1/article/details/114449861 https://zhuanlan.zhihu.com/p/270663039 https://zhuanlan.zhihu.com/p/416550548 https://zhuanlan.zhihu.com/p/94799295 https://blog.csdn.net/neil3611244/article/details/113794197 https://www.it610.com/article/1453500272809689088.htm https://zhuanlan.zhihu.com/p/375745293 https://mp.weixin.qq.com/s/jMWTFeDh6_0rhCzcYjw7sg https://zhuanlan.zhihu.com/p/266023273 https://zhuanlan.zhihu.com/p/394892530
推薦閱讀
輔助模塊加速收斂,精度大幅提升!移動(dòng)端實(shí)時(shí)的NanoDet-Plus來(lái)了!
SSD的torchvision版本實(shí)現(xiàn)詳解
機(jī)器學(xué)習(xí)算法工程師
? ??? ? ? ? ? ? ? ? ? ? ????????? ??一個(gè)用心的公眾號(hào)
