
深入淺出Yolov3和Yolov4
點擊左上方藍字關注我們

作者 | 江大白@知乎
鏈接 | https://zhuanlan.zhihu.com/p/143747206
從2018年Yolov3年提出的兩年后,在原作者聲名放棄更新Yolo算法后,俄羅斯的Alexey大神扛起了Yolov4的大旗。
在此,大白將項目中,需要了解的Yolov3、Yolov4系列相關知識點以及相關代碼進行完整的匯總,希望和大家共同學習探討。
1.論文匯總
Yolov3論文名:《Yolov3: An Incremental Improvement》
Yolov3論文地址:arxiv.org/pdf/1804.0276
Yolov4論文名:《Yolov4: Optimal Speed and Accuracy of Object Detection》
Yolov4論文地址:arxiv.org/pdf/2004.1093
2.YoloV3核心基礎內容
2.1 網絡結構可視化
Yolov3是目標檢測Yolo系列非常非常經典的算法,不過很多同學拿到Yolov3或者Yolov4的cfg文件時,并不知道如何直觀的可視化查看網絡結構。如果純粹看cfg里面的內容,肯定會一臉懵逼。
其實可以很方便的用netron查看Yolov3的網絡結構圖,一目了然。
這里不多說,如果需要安裝,可以移步大白的另一篇文章:《網絡可視化工具netron詳細安裝流程》。
如果不想安裝,也可以直接點擊此鏈接,查看Yolov3可視化流程圖。
2.2 網絡結構圖
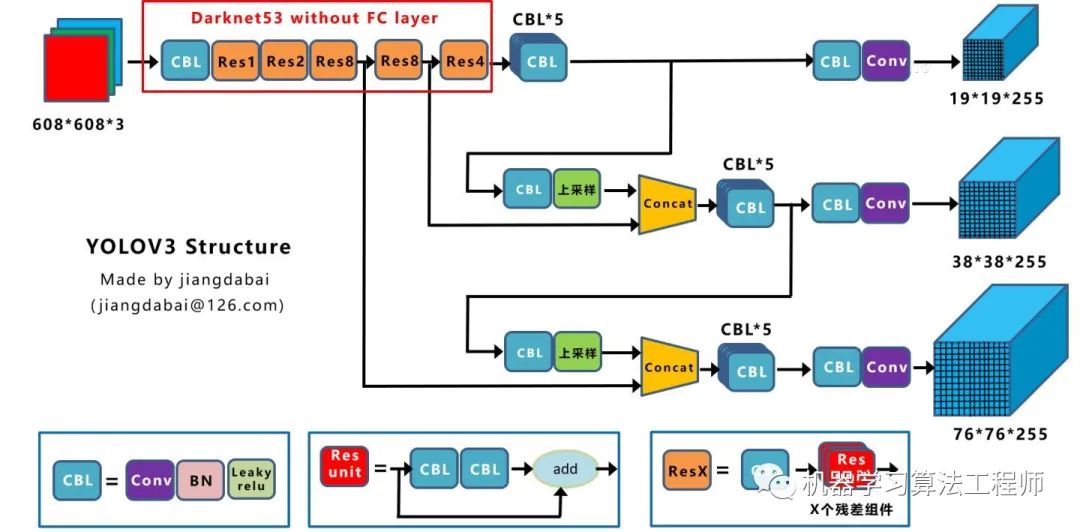
繪制網絡結構圖受到Yolov3另一位作者文章的啟發(fā),包括下面Yolov4的結構圖,確實,從總體框架上先了解了Yolov3的流程,再針對去學習每一小塊的知識點,會事半功倍。
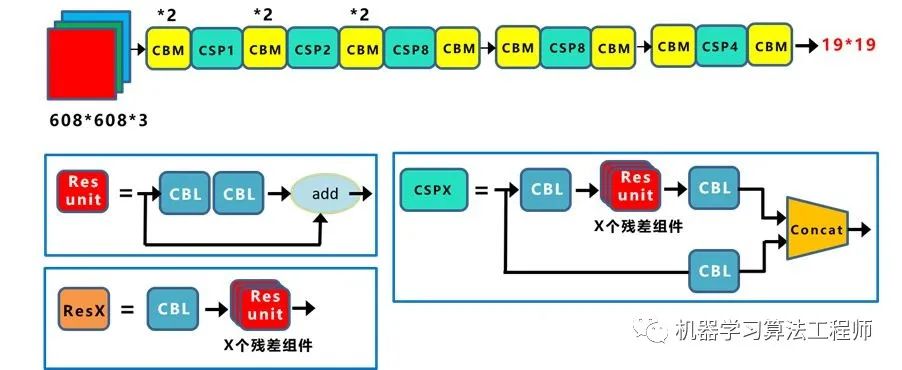
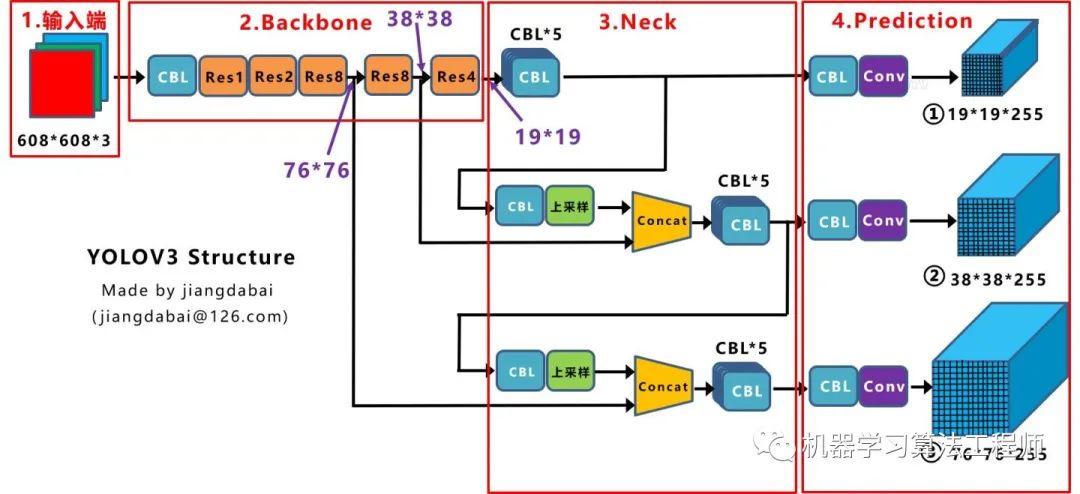
上圖三個藍色方框內表示Yolov3的三個基本組件:
CBL:Yolov3網絡結構中的最小組件,由Conv+Bn+Leaky_relu激活函數三者組成。
Res unit:借鑒Resnet網絡中的殘差結構,讓網絡可以構建的更深。
ResX:由一個CBL和X個殘差組件構成,是Yolov3中的大組件。每個Res模塊前面的CBL都起到下采樣的作用,因此經過5次Res模塊后,得到的特征圖是608->304->152->76->38->19大小。
其他基礎操作:
Concat:張量拼接,會擴充兩個張量的維度,例如26*26*256和26*26*512兩個張量拼接,結果是26*26*768。Concat和cfg文件中的route功能一樣。
add:張量相加,張量直接相加,不會擴充維度,例如104*104*128和104*104*128相加,結果還是104*104*128。add和cfg文件中的shortcut功能一樣。
Backbone中卷積層的數量:
每個ResX中包含1+2*X個卷積層,因此整個主干網絡Backbone中一共包含1+(1+2*1)+(1+2*2)+(1+2*8)+(1+2*8)+(1+2*4)=52,再加上一個FC全連接層,即可以組成一個Darknet53分類網絡。不過在目標檢測Yolov3中,去掉FC層,不過為了方便稱呼,仍然把Yolov3的主干網絡叫做Darknet53結構。
2.3 核心基礎內容
Yolov3是2018年發(fā)明提出的,這成為了目標檢測one-stage中非常經典的算法,包含Darknet-53網絡結構、anchor錨框、FPN等非常優(yōu)秀的結構。
本文主要目的在于描述Yolov4和Yolov3算法的不同及創(chuàng)新之處,對Yolov3的基礎不過多描述。
不過大白也正在準備Yolov3算法非常淺顯易懂的基礎視頻課程,讓小白也能簡單清楚的了解Yolov3的整個過程及各個算法細節(jié),制作好后會更新到此處,便于大家查看。
在準備課程過程中,大白搜集查看了網絡上幾乎所有的Yolov3資料,在此整理幾個非常不錯的文章及視頻,大家也可以點擊查看,學習相關知識。
(1)視頻:吳恩達目標檢測Yolo入門講解
https://www.bilibili.com/video/BV1N4411J7Y6?from=search&seid=18074481568368507115
(2)文章:Yolo系列之Yolov3【深度解析】
https://blog.csdn.net/leviopku/article/details/82660381
(3)文章:一文看懂Yolov3
https://blog.csdn.net/litt1e/article/details/88907542
相信大家看完,對于Yolov3的基礎知識點會有一定的了解。
3.YoloV3相關代碼
3.1 python代碼
代碼地址:https://github.com/ultralytics/Yolov3
3.2 C++代碼
這里推薦Yolov4作者的darknetAB代碼,代碼和原始作者代碼相比,進行了很多的優(yōu)化,如需要運行Yolov3網絡,加載cfg時,使用Yolov3.cfg即可
代碼地址:https://github.com/AlexeyAB/darknet
3.3 python版本的Tensorrt代碼
除了算法研究外,實際項目中還需要將算法落地部署到工程上使用,比如GPU服務器使用時還需要對模型進行tensorrt加速。
(1)Tensort中的加速案例
強烈推薦tensort軟件中,自帶的Yolov3加速案例,路徑位于tensorrt解壓文件夾的TensortX/samples/python/Yolov3_onnx中
針對案例中的代碼,如果有不明白的,也可參照下方文章上的詳細說明:
代碼地址:https://www.cnblogs.com/shouhuxianjian/p/10550262.html
(2)Github上的tensorrt加速
除了tensorrt軟件中的代碼, github上也有其他作者的開源代碼
代碼地址:https://github.com/lewes6369/TensorRT-Yolov3
3.4 C++版本的Tensorrt代碼
項目的工程部署上,如果使用C++版本進行Tensorrt加速,一方面可以參照Alexey的github代碼,另一方面也可以參照下面其他作者的開源代碼
代碼地址:https://github.com/wang-xinyu/tensorrtx/tree/master/Yolov3
4.YoloV4核心基礎內容
4.1 網絡結構可視化
Yolov4的網絡結構也可以使用netron工具查看,大白也是對照其展示的可視化流程圖繪制的下方網絡結構圖。
netron可視化顯示Yolov4網絡結構可以參照大白的另一篇文章:《netron可視化網絡結構詳細安裝流程》
如果不想安裝,也可以直接點擊此鏈接,查看Yolov4可視化流程圖。
4.2 網絡結構圖
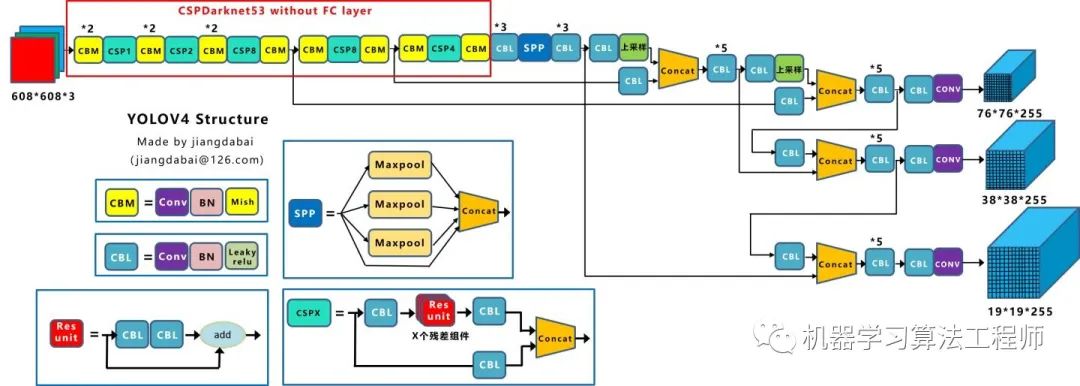
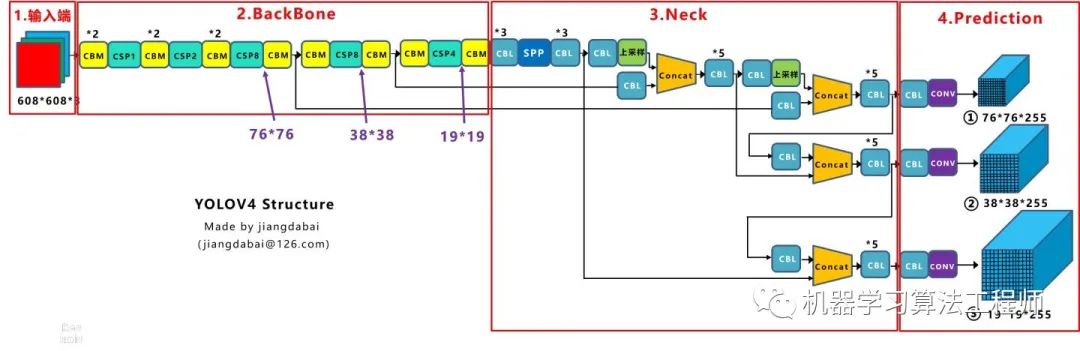
Yolov4的結構圖和Yolov3相比,因為多了CSP結構,PAN結構,如果單純看可視化流程圖,會覺得很繞,不過在繪制出上面的圖形后,會覺得豁然開朗,其實整體架構和Yolov3是相同的,不過使用各種新的算法思想對各個子結構都進行了改進。
先整理下Yolov4的五個基本組件:
CBM:Yolov4網絡結構中的最小組件,由Conv+Bn+Mish激活函數三者組成。
CBL:由Conv+Bn+Leaky_relu激活函數三者組成。
Res unit:借鑒Resnet網絡中的殘差結構,讓網絡可以構建的更深。
CSPX:借鑒CSPNet網絡結構,由三個卷積層和X個Res unint模塊Concate組成。
SPP:采用1×1,5×5,9×9,13×13的最大池化的方式,進行多尺度融合。
其他基礎操作:
Concat:張量拼接,維度會擴充,和Yolov3中的解釋一樣,對應于cfg文件中的route操作。
add:張量相加,不會擴充維度,對應于cfg文件中的shortcut操作。
Backbone中卷積層的數量:
和Yolov3一樣,再來數一下Backbone里面的卷積層數量。
每個CSPX中包含3+2*X個卷積層,因此整個主干網絡Backbone中一共包含2+(3+2*1)+2+(3+2*2)+2+(3+2*8)+2+(3+2*8)+2+(3+2*4)+1=72。
這里大白有些疑惑,按照Yolov3設計的傳統(tǒng),這么多卷積層,主干網絡不應該叫CSPDaeknet73嗎????
4.3 核心基礎內容
Yolov4本質上和Yolov3相差不大,可能有些人會覺得失望。
但我覺得算法創(chuàng)新分為三種方式:
第一種:面目一新的創(chuàng)新,比如Yolov1、Faster-RCNN、Centernet等,開創(chuàng)出新的算法領域,不過這種也是最難的
第二種:守正出奇的創(chuàng)新,比如將圖像金字塔改進為特征金字塔
第三種:各種先進算法集成的創(chuàng)新,比如不同領域發(fā)表的最新論文的tricks,集成到自己的算法中,卻發(fā)現(xiàn)有出乎意料的改進
Yolov4既有第二種也有第三種創(chuàng)新,組合嘗試了大量深度學習領域最新論文的20多項研究成果,而且不得不佩服的是作者Alexey在github代碼庫維護的頻繁程度。
目前Yolov4代碼的star數量已經1萬多,據我所了解,目前超過這個數量的,目標檢測領域只有Facebook的Detectron(v1-v2)、和Yolo(v1-v3)官方代碼庫(已停止更新)。
所以Yolov4中的各種創(chuàng)新方式,大白覺得還是很值得仔細研究的。
為了便于分析,將Yolov4的整體結構拆分成四大板塊:
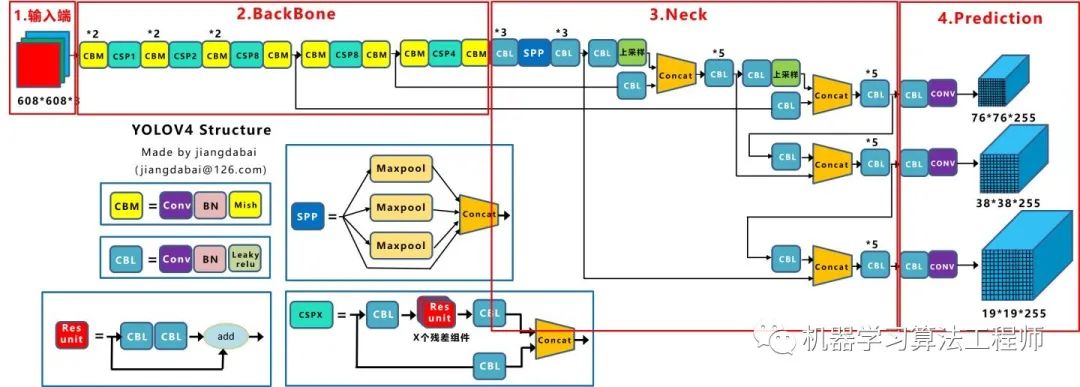
大白主要從以上4個部分對YoloV4的創(chuàng)新之處進行講解,讓大家一目了然。
輸入端:這里指的創(chuàng)新主要是訓練時對輸入端的改進,主要包括Mosaic數據增強、cmBN、SAT自對抗訓練
BackBone主干網絡:將各種新的方式結合起來,包括:CSPDarknet53、Mish激活函數、Dropblock
Neck:目標檢測網絡在BackBone和最后的輸出層之間往往會插入一些層,比如Yolov4中的SPP模塊、FPN+PAN結構
Prediction:輸出層的錨框機制和Yolov3相同,主要改進的是訓練時的損失函數CIOU_Loss,以及預測框篩選的nms變?yōu)?span style="max-width: 100%;font-weight: 600;box-sizing: border-box !important;overflow-wrap: break-word !important;">DIOU_nms
總體來說,Yolov4對Yolov3的各個部分都進行了改進優(yōu)化,下面丟上作者的算法對比圖。
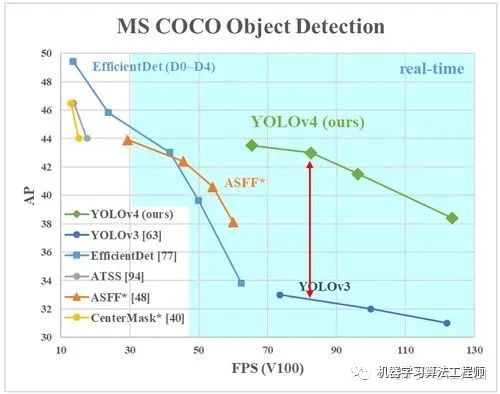
僅對比Yolov3和Yolov4,在COCO數據集上,同樣的FPS等于83左右時,Yolov4的AP是43,而Yolov3是33,直接上漲了10個百分點。
不得不服,當然可能針對具體不同的數據集效果也不一樣,但總體來說,改進效果是很優(yōu)秀的,下面大白對Yolov4的各個創(chuàng)新點繼續(xù)進行深挖。
4.3.1 輸入端創(chuàng)新
考慮到很多同學GPU顯卡數量并不是很多,Yolov4對訓練時的輸入端進行改進,使得訓練在單張GPU上也能有不錯的成績。比如數據增強Mosaic、cmBN、SAT自對抗訓練。
但感覺cmBN和SAT影響并不是很大,所以這里主要講解Mosaic數據增強。
(1)Mosaic數據增強
Yolov4中使用的Mosaic是參考2019年底提出的CutMix數據增強的方式,但CutMix只使用了兩張圖片進行拼接,而Mosaic數據增強則采用了4張圖片,隨機縮放、隨機裁剪、隨機排布的方式進行拼接。

這里首先要了解為什么要進行Mosaic數據增強呢?
在平時項目訓練時,小目標的AP一般比中目標和大目標低很多。而Coco數據集中也包含大量的小目標,但比較麻煩的是小目標的分布并不均勻。
首先看下小、中、大目標的定義:
2019年發(fā)布的論文《Augmentation for small object detection》對此進行了區(qū)分:
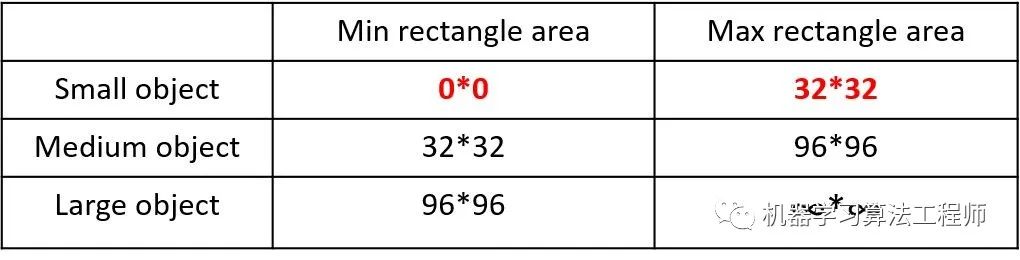
可以看到小目標的定義是目標框的長寬0×0~32×32之間的物體。

但在整體的數據集中,小、中、大目標的占比并不均衡。
如上表所示,Coco數據集中小目標占比達到41.4%,數量比中目標和大目標都要多。
但在所有的訓練集圖片中,只有52.3%的圖片有小目標,而中目標和大目標的分布相對來說更加均勻一些。
針對這種狀況,Yolov4的作者采用了Mosaic數據增強的方式。
主要有幾個優(yōu)點:
豐富數據集:隨機使用4張圖片,隨機縮放,再隨機分布進行拼接,大大豐富了檢測數據集,特別是隨機縮放增加了很多小目標,讓網絡的魯棒性更好。
減少GPU:可能會有人說,隨機縮放,普通的數據增強也可以做,但作者考慮到很多人可能只有一個GPU,因此Mosaic增強訓練時,可以直接計算4張圖片的數據,使得Mini-batch大小并不需要很大,一個GPU就可以達到比較好的效果。
此外,發(fā)現(xiàn)另一研究者的訓練方式也值得借鑒,采用的數據增強和Mosaic比較類似,也是使用4張圖片(不是隨機分布),但訓練計算loss時,采用“缺啥補啥”的思路:
如果上一個iteration中,小物體產生的loss不足(比如小于某一個閾值),則下一個iteration就用拼接圖;否則就用正常圖片訓練,也很有意思。
參考鏈接:https://www.zhihu.com/question/390191723?rf=390194081
4.3.2 BackBone創(chuàng)新
(1)CSPDarknet53
CSPDarknet53是在Yolov3主干網絡Darknet53的基礎上,借鑒2019年CSPNet的經驗,產生的Backbone結構,其中包含了5個CSP模塊。
這里因為CSP模塊比較長,不放到本處,大家也可以點擊Yolov4的netron網絡結構圖,對比查看,一目了然。
每個CSP模塊前面的卷積核的大小都是3*3,因此可以起到下采樣的作用。
因為Backbone有5個CSP模塊,輸入圖像是608*608,所以特征圖變化的規(guī)律是:608->304->152->76->38->19
經過5次CSP模塊后得到19*19大小的特征圖。
而且作者只在Backbone中采用了Mish激活函數,網絡后面仍然采用Leaky_relu激活函數。
我們再看看下作者為啥要參考2019年的CSPNet,采用CSP模塊?
CSPNet論文地址:arxiv.org/pdf/1911.1192
CSPNet全稱是Cross Stage Paritial Network,主要從網絡結構設計的角度解決推理中從計算量很大的問題。
CSPNet的作者認為推理計算過高的問題是由于網絡優(yōu)化中的梯度信息重復導致的。
因此采用CSP模塊先將基礎層的特征映射劃分為兩部分,然后通過跨階段層次結構將它們合并,在減少了計算量的同時可以保證準確率。
因此Yolov4在主干網絡Backbone采用CSPDarknet53網絡結構,主要有三個方面的優(yōu)點:
優(yōu)點一:增強CNN的學習能力,使得在輕量化的同時保持準確性。
優(yōu)點二:降低計算瓶頸
優(yōu)點三:降低內存成本
(2)Mish激活函數
Mish激活函數是2019年下半年提出的激活函數
論文地址:arxiv.org/abs/1908.0868
和Leaky_relu激活函數的圖形對比如下:
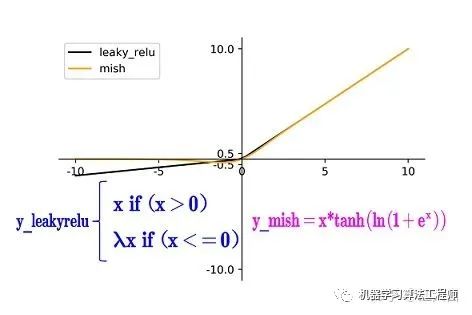
Yolov4的Backbone中都使用了Mish激活函數,而后面的網絡則還是使用leaky_relu函數。
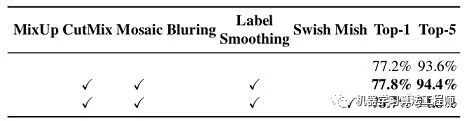
Yolov4作者實驗測試時,使用CSPDarknet53網絡在ImageNet數據集上做圖像分類任務,發(fā)現(xiàn)使用了Mish激活函數的TOP-1和TOP-5的精度比沒有使用時都略高一些。
因此在設計Yolov4目標檢測任務時,主干網絡Backbone還是使用Mish激活函數。
(3)Dropblock
Yolov4中使用的Dropblock,其實和常見網絡中的Dropout功能類似,也是緩解過擬合的一種正則化方式。
Dropblock在2018年提出,論文地址:arxiv.org/pdf/1810.1289
傳統(tǒng)的Dropout很簡單,一句話就可以說的清:隨機刪除減少神經元的數量,使網絡變得更簡單。
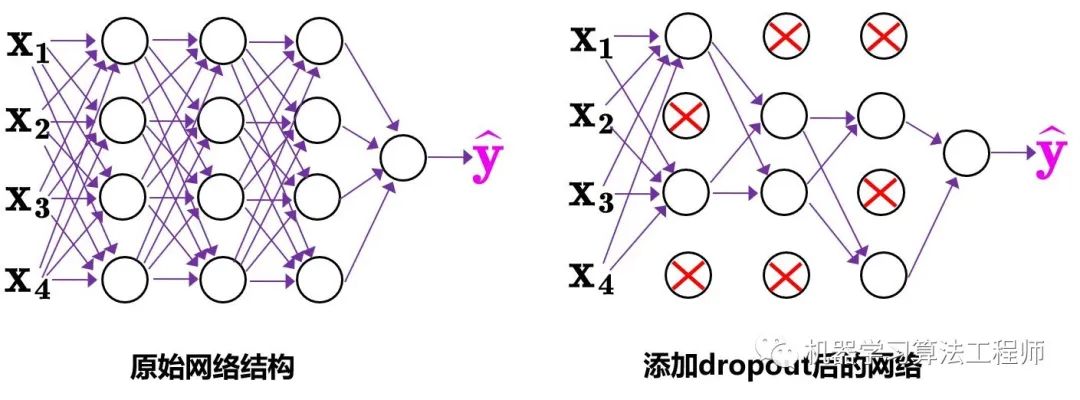
而Dropblock和Dropout相似,比如下圖:
中間Dropout的方式會隨機的刪減丟棄一些信息,但Dropblock的研究者認為,卷積層對于這種隨機丟棄并不敏感,因為卷積層通常是三層連用:卷積+激活+池化層,池化層本身就是對相鄰單元起作用。而且即使隨機丟棄,卷積層仍然可以從相鄰的激活單元學習到相同的信息。
因此,在全連接層上效果很好的Dropout在卷積層上效果并不好。
所以右圖Dropblock的研究者則干脆整個局部區(qū)域進行刪減丟棄。
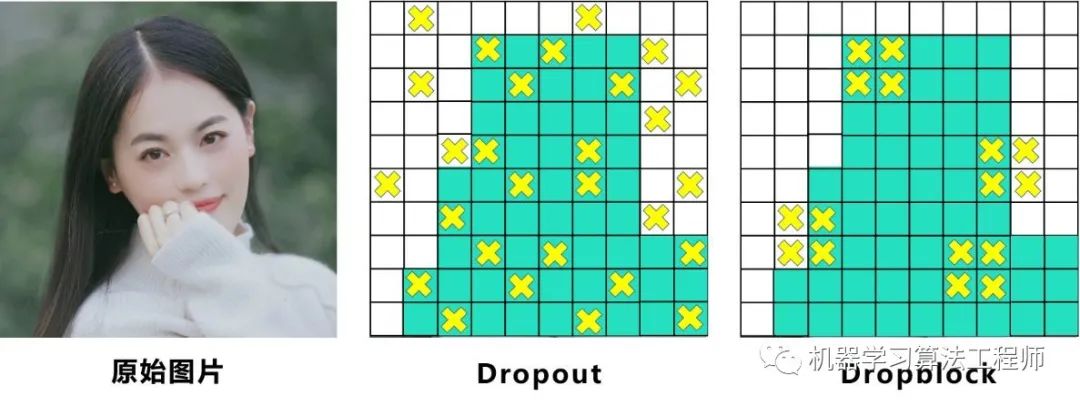
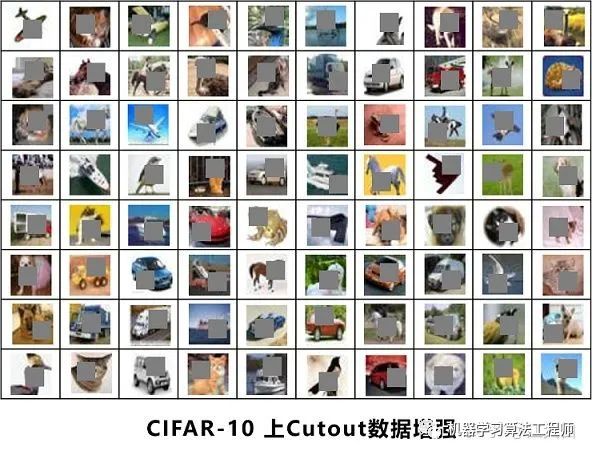
這種方式其實是借鑒2017年的cutout數據增強的方式,cutout是將輸入圖像的部分區(qū)域清零,而Dropblock則是將Cutout應用到每一個特征圖。而且并不是用固定的歸零比率,而是在訓練時以一個小的比率開始,隨著訓練過程線性的增加這個比率。
Dropblock的研究者與Cutout進行對比驗證時,發(fā)現(xiàn)有幾個特點:
優(yōu)點一:Dropblock的效果優(yōu)于Cutout
優(yōu)點二:Cutout只能作用于輸入層,而Dropblock則是將Cutout應用到網絡中的每一個特征圖上
優(yōu)點三:Dropblock可以定制各種組合,在訓練的不同階段可以修改刪減的概率,從空間層面和時間層面,和Cutout相比都有更精細的改進。
Yolov4中直接采用了更優(yōu)的Dropblock,對網絡的正則化過程進行了全面的升級改進。
4.3.3 Neck創(chuàng)新
在目標檢測領域,為了更好的提取融合特征,通常在Backbone和輸出層,會插入一些層,這個部分稱為Neck。相當于目標檢測網絡的頸部,也是非常關鍵的。
Yolov4的Neck結構主要采用了SPP模塊、FPN+PAN的方式。
(1)SPP模塊
SPP模塊,其實在Yolov3中已經存在了,在Yolov4的C++代碼文件夾中有一個Yolov3_spp版本,但有的同學估計從來沒有使用過,在Yolov4中,SPP模塊仍然是在Backbone主干網絡之后:
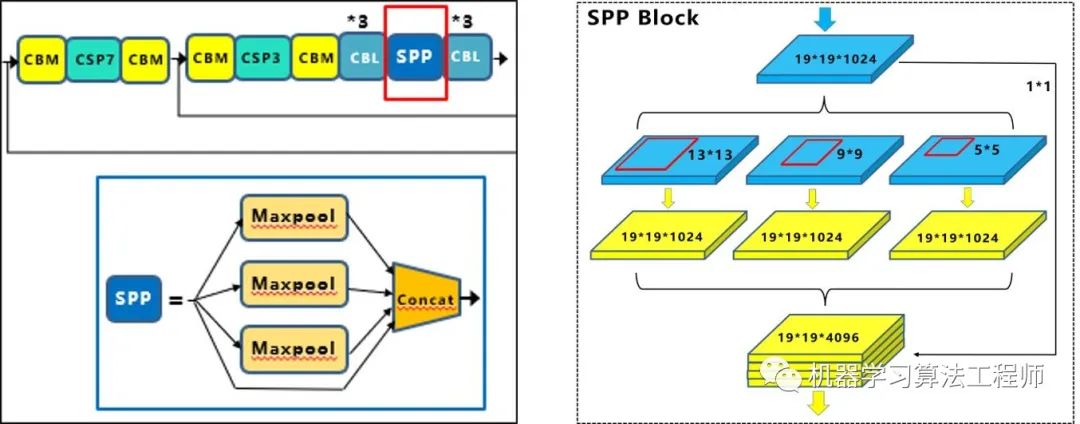
作者在SPP模塊中,使用k={1*1,5*5,9*9,13*13}的最大池化的方式,再將不同尺度的特征圖進行Concat操作。

在《DC-SPP-Yolo》文章:
也對Yolo目標檢測的SPP模塊進行了對比測試。
和Yolov4作者的研究相同,采用SPP模塊的方式,比單純的使用k*k最大池化的方式,更有效的增加主干特征的接收范圍,顯著的分離了最重要的上下文特征。
Yolov4的作者在使用608*608大小的圖像進行測試時發(fā)現(xiàn),在COCO目標檢測任務中,以0.5%的額外計算代價將AP50增加了2.7%,因此Yolov4中也采用了SPP模塊。
(2)FPN+PAN
PAN結構比較有意思,看了網上Yolov4關于這個部分的講解,大多都是講的比較籠統(tǒng)的,而PAN是借鑒圖像分割領域PANet的創(chuàng)新點,有些同學可能不是很清楚。
下面大白將這個部分拆解開來,看下Yolov4中是如何設計的。
Yolov3結構:
我們先來看下Yolov3中Neck的FPN結構
可以看到經過幾次下采樣,三個紫色箭頭指向的地方,輸出分別是76*76、38*38、19*19。
以及最后的Prediction中用于預測的三個特征圖①19*19*255、②38*38*255、③76*76*255。
我們將Neck部分用立體圖畫出來,更直觀的看下兩部分之間是如何通過FPN結構融合的。
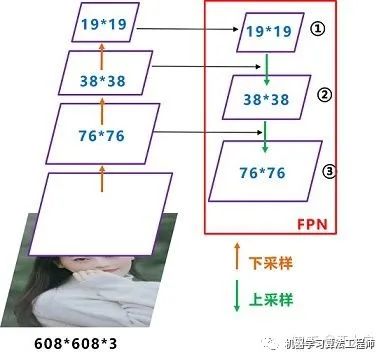
如圖所示,F(xiàn)PN是自頂向下的,將高層的特征信息通過上采樣的方式進行傳遞融合,得到進行預測的特征圖。
Yolov4結構:
而Yolov4中Neck這部分除了使用FPN外,還在此基礎上使用了PAN結構:
前面CSPDarknet53中講到,每個CSP模塊前面的卷積核都是3*3大小,相當于下采樣操作。
因此可以看到三個紫色箭頭處的特征圖是76*76、38*38、19*19。
以及最后Prediction中用于預測的三個特征圖:①76*76*255,②38*38*255,③19*19*255。
我們也看下Neck部分的立體圖像,看下兩部分是如何通過FPN+PAN結構進行融合的。
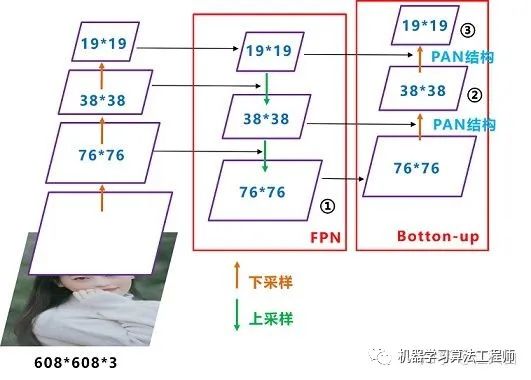
和Yolov3的FPN層不同,Yolov4在FPN層的后面還添加了一個自底向上的特征金字塔。
其中包含兩個PAN結構。
這樣結合操作,F(xiàn)PN層自頂向下傳達強語義特征,而特征金字塔則自底向上傳達強定位特征,兩兩聯(lián)手,從不同的主干層對不同的檢測層進行參數聚合,這樣的操作確實很皮。
FPN+PAN借鑒的是18年CVPR的PANet,當時主要應用于圖像分割領域,但Alexey將其拆分應用到Yolov4中,進一步提高特征提取的能力。
不過這里需要注意幾點:
注意一:
Yolov3的FPN層輸出的三個大小不一的特征圖①②③直接進行預測
但Yolov4的FPN層,只使用最后的一個76*76特征圖①,而經過兩次PAN結構,輸出預測的特征圖②和③。
這里的不同也體現(xiàn)在cfg文件中,這一點有很多同學之前不太明白,
比如Yolov3.cfg最后的三個Yolo層,
第一個Yolo層是最小的特征圖19*19,mask=6,7,8,對應最大的anchor box。
第二個Yolo層是中等的特征圖38*38,mask=3,4,5,對應中等的anchor box。
第三個Yolo層是最大的特征圖76*76,mask=0,1,2,對應最小的anchor box。
而Yolov4.cfg則恰恰相反
第一個Yolo層是最大的特征圖76*76,mask=0,1,2,對應最小的anchor box。
第二個Yolo層是中等的特征圖38*38,mask=3,4,5,對應中等的anchor box。
第三個Yolo層是最小的特征圖19*19,mask=6,7,8,對應最大的anchor box。
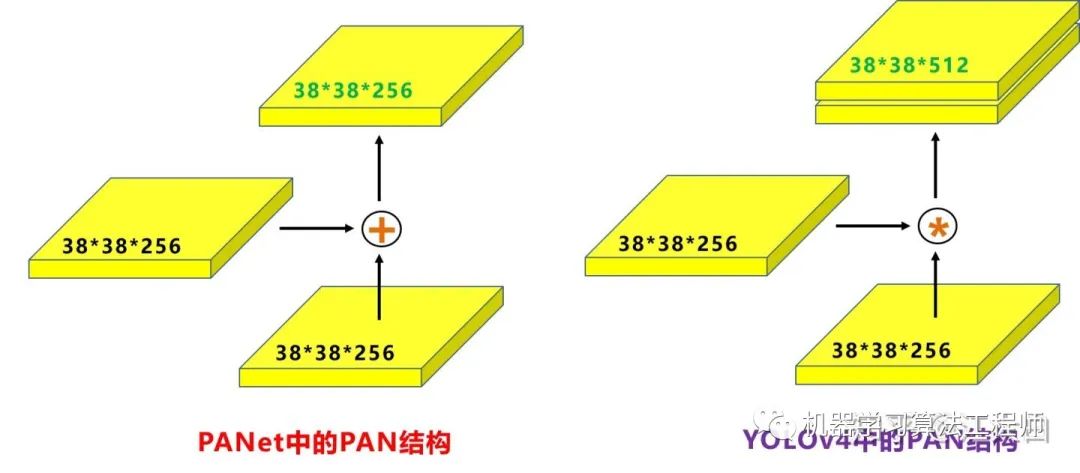
注意點二:
原本的PANet網絡的PAN結構中,兩個特征圖結合是采用shortcut操作,而Yolov4中則采用concat(route)操作,特征圖融合后的尺寸發(fā)生了變化。
這里也可以對應Yolov4的netron網絡圖查看,很有意思。
4.3.4 Prediction創(chuàng)新
(1)CIOU_loss
目標檢測任務的損失函數一般由Classificition Loss(分類損失函數)和Bounding Box Regeression Loss(回歸損失函數)兩部分構成。
Bounding Box Regeression的Loss近些年的發(fā)展過程是:Smooth L1 Loss-> IoU Loss(2016)-> GIoU Loss(2019)-> DIoU Loss(2020)->CIoU Loss(2020)
我們從最常用的IOU_Loss開始,進行對比拆解分析,看下Yolov4為啥要選擇CIOU_Loss。
a.IOU_Loss
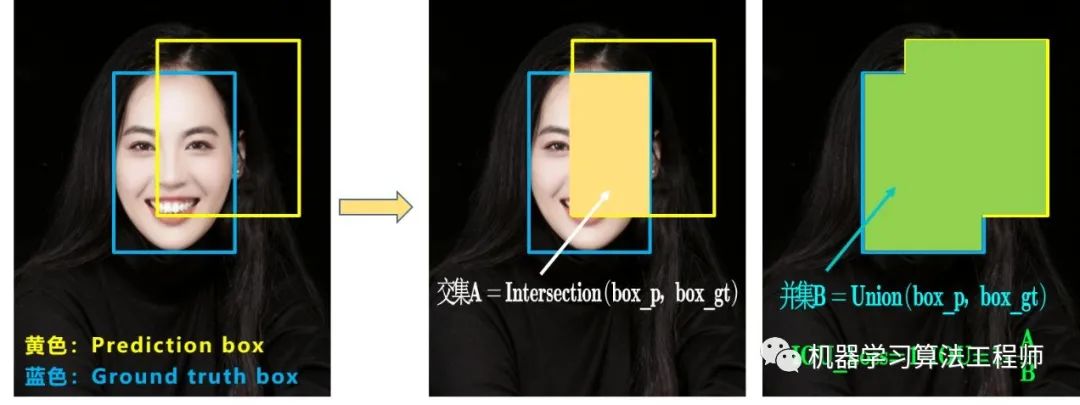
可以看到IOU的loss其實很簡單,主要是交集/并集,但其實也存在兩個問題。
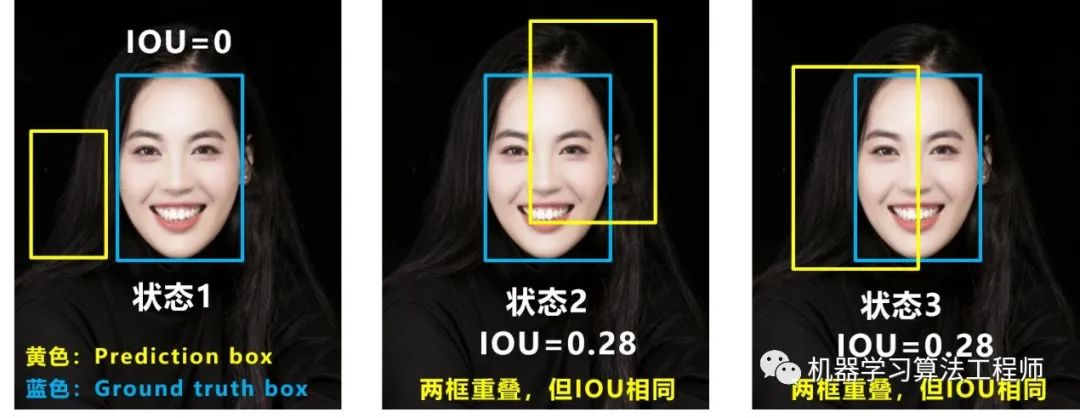
問題1:即狀態(tài)1的情況,當預測框和目標框不想交時,IOU=0,無法反應兩個框距離的遠近,此時損失函數不可導,IOU_Loss無法優(yōu)化兩個框不相交的情況。
問題2:即狀態(tài)2和狀態(tài)3的情況,當兩個預測框大小相同,兩個IOU也相同,IOU_Loss無法區(qū)分兩者相交情況的不同。
因此2019年出現(xiàn)了GIOU來進行改進。
b.GIOU_Loss
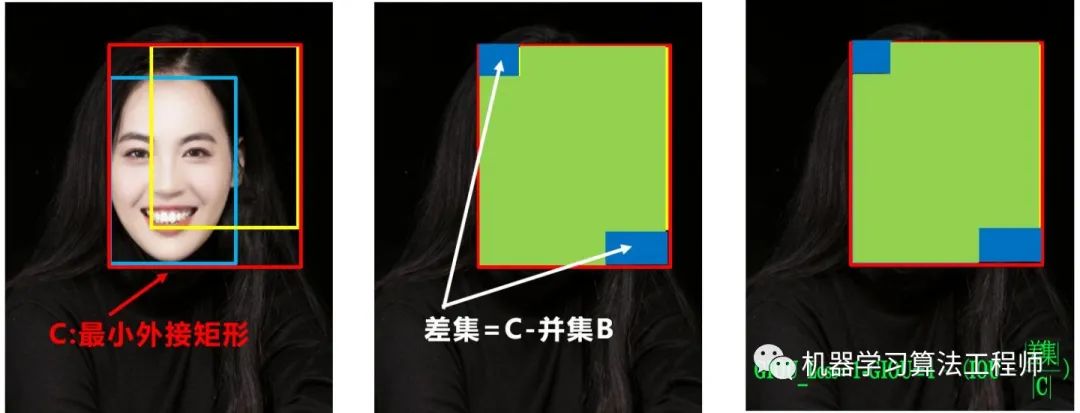
可以看到右圖
GIOU_中,增加了相交尺度的衡量方式,緩解了單純IOU時的尷尬。
但為什么僅僅說緩解呢?
因為還存在一種不足:
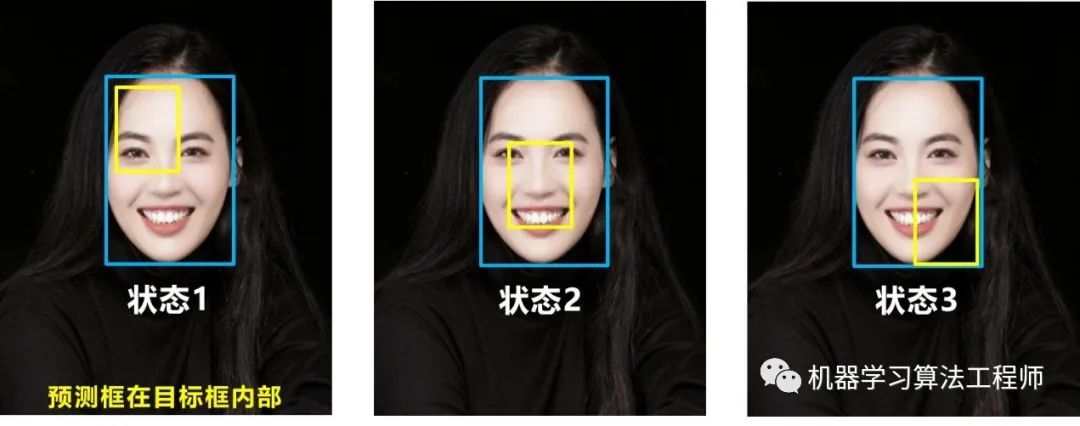
問題:狀態(tài)1、2、3都是預測框在目標框內部且預測框大小一致的情況,這時預測框和目標框的差集都是相同的,因此這三種狀態(tài)的GIOU值也都是相同的,這時GIOU退化成了IOU,無法區(qū)分相對位置關系。
基于這個問題,2020年的AAAI又提出了DIOU_Loss。
c.DIOU_Loss
好的目標框回歸函數應該考慮三個重要幾何因素:重疊面積、中心點距離,長寬比。
針對IOU和GIOU存在的問題,作者從兩個方面進行考慮
一:如何最小化預測框和目標框之間的歸一化距離?
二:如何在預測框和目標框重疊時,回歸的更準確?
針對第一個問題,提出了DIOU_Loss(Distance_IOU_Loss)
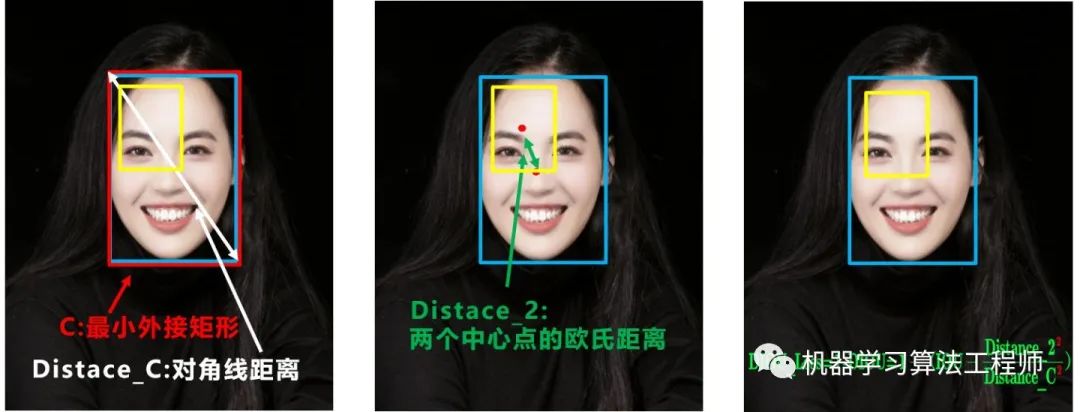
DIOU_Loss考慮了重疊面積和中心點距離,當目標框包裹預測框的時候,直接度量2個框的距離,因此DIOU_Loss收斂的更快。
但就像前面好的目標框回歸函數所說的,沒有考慮到長寬比。
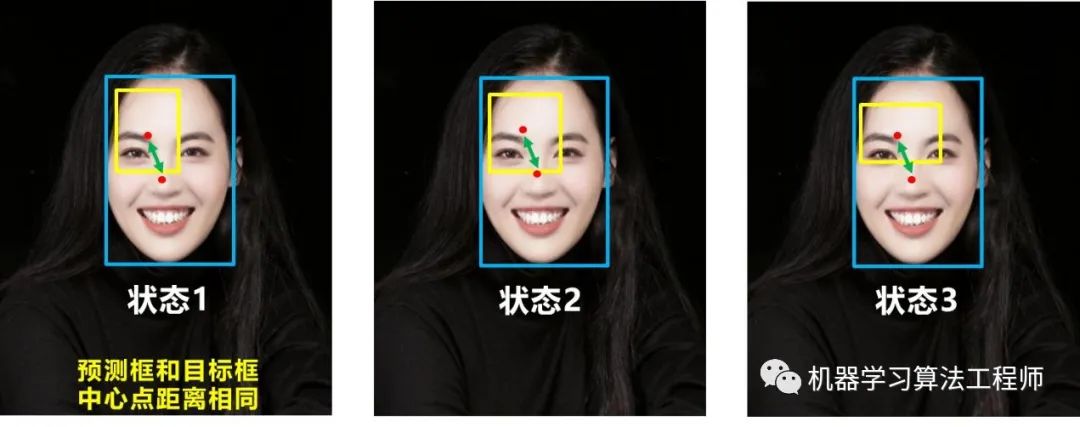
比如上面三種情況,目標框包裹預測框,本來DIOU_Loss可以起作用。
但預測框的中心點的位置都是一樣的,因此按照DIOU_Loss的計算公式,三者的值都是相同的。
針對這個問題,又提出了CIOU_Loss,不對不說,科學總是在解決問題中,不斷進步!!
d.CIOU_Loss
CIOU_Loss和DIOU_Loss前面的公式都是一樣的,不過在此基礎上還增加了一個影響因子,將預測框和目標框的長寬比都考慮了進去。

其中v是衡量長寬比一致性的參數,我們也可以定義為:
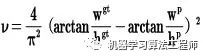
這樣CIOU_Loss就將目標框回歸函數應該考慮三個重要幾何因素:重疊面積、中心點距離,長寬比全都考慮進去了。
再來綜合的看下各個Loss函數的不同點:
IOU_Loss:主要考慮檢測框和目標框重疊面積。
GIOU_Loss:在IOU的基礎上,解決邊界框不重合時的問題。
DIOU_Loss:在IOU和GIOU的基礎上,考慮邊界框中心點距離的信息。
CIOU_Loss:在DIOU的基礎上,考慮邊界框寬高比的尺度信息。
Yolov4中采用了CIOU_Loss的回歸方式,使得預測框回歸的速度和精度更高一些。
(2)DIOU_nms
Nms主要用于預測框的篩選,常用的目標檢測算法中,一般采用普通的nms的方式,Yolov4則借鑒上面D/CIOU loss的論文:arxiv.org/pdf/1911.0828
將其中計算IOU的部分替換成DIOU的方式:
再來看下實際的案例
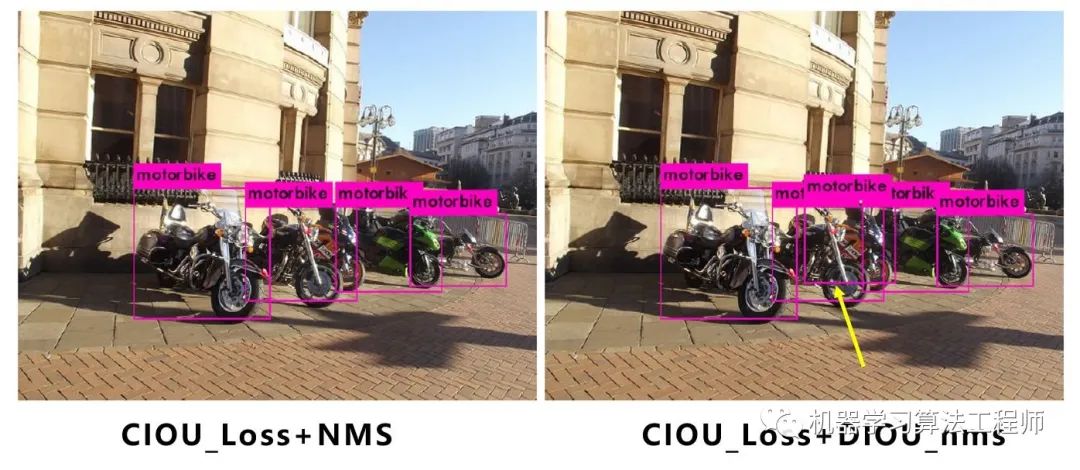
在上圖重疊的摩托車檢測中,中間的摩托車因為考慮邊界框中心點的位置信息,也可以回歸出來。
因此在重疊目標的檢測中,DIOU_nms的效果優(yōu)于傳統(tǒng)的nms。
總體來說,YOLOv4的論文稱的上良心之作,將近幾年關于深度學習領域最新研究的tricks移植到Yolov4中做驗證測試,將Yolov3的精度提高了不少。
雖然沒有全新的創(chuàng)新,但很多改進之處都值得借鑒,借用Yolov4作者的總結。
Yolov4 主要帶來了 3 點新貢獻:
(1)提出了一種高效而強大的目標檢測模型,使用 1080Ti 或 2080Ti 就能訓練出超快、準確的目標檢測器。
(2)在檢測器訓練過程中,驗證了最先進的一些研究成果對目標檢測器的影響。
(3)改進了 SOTA 方法,使其更有效、更適合單 GPU 訓練。
5.YoloV4相關代碼
5.1 python代碼
代碼地址:https://github.com/Tianxiaomo/pytorch-Yolov4
作者的訓練和測試推理代碼都已經完成
5.2 C++代碼
Yolov4作者Alexey的代碼,俄羅斯的大神,應該是個獨立研究員,更新算法的頻繁程度令人佩服。
在Yolov3作者Joseph Redmon宣布停止更新Yolo算法之后,Alexey憑借對于Yolov3算法的不斷探索研究,贏得了Yolov3作者的認可,發(fā)布了Yolov4。
代碼地址:github.com/AlexeyAB/darknet
5.3 python版本的Tensorrt代碼
目前測試有效的有tensorflow版本:weights->pb->trt
代碼地址:https://github.com/hunglc007/tensorflow-Yolov4-tflite
5.4 C++版本的Tensorrtrt代碼
代碼地址:https://github.com/wang-xinyu/tensorrtx/tree/master/Yolov4
作者自定義了mish激活函數的plugin層,Tensorrt加速后速度還是挺快的。
6.相關數據集下載
項目中,目標檢測算法應該的非常多非常多,比如人臉識別,比如疫情期間的口罩人臉識別,比如車流統(tǒng)計,人流統(tǒng)計等等。
因此大白也會將不錯的值得一試的目標檢測數據集匯總到此處,方便需要的同學進行下載。
6.1 口罩遮擋人臉數據集
數據集詳情:由武漢大學多媒體研究中心發(fā)起,目前是全球最大的口罩遮擋人臉數據集。
分為真實口罩人臉和模擬口罩人臉兩部分,真實口罩人臉包含525人的5000張口罩人臉和9萬張正常人臉。模擬口罩人臉包含1萬個人共50萬張模擬人臉數據集。
應用項目:人臉檢測、人臉識別
數據集地址:https://github.com/X-zhangyang/Real-World-Masked-Face-Dataset
6.2 Wider Face人臉數據集
數據集詳情:香港中文大學發(fā)起的,包含3萬張圖片共40萬張人臉。
應用項目:人臉檢測
數據集地址:http://shuoyang1213.me/WIDERFACE/WiderFace_Results.html
6.3 Wider Person擁擠場景行人數據集
數據集詳情:多種場景比較擁擠場景的行人檢測數據集,包含13382張圖片,共計40萬個不同遮擋程度的人體。
應用項目:人體檢測
數據集地址:http://www.cbsr.ia.ac.cn/users/sfzhang/WiderPerson/
因為工作原因,會搜集大量的各類公開應用場景數據集,如果有同學需要其他場景或者其他項目的,也可以留言,或者發(fā)送郵件到[email protected],也會將對應的數據集更新到此處。
7.不斷更新ing
在深度學習的圖像領域,肯定會涉及目標檢測,而在目標檢測中,Yolov3是非常經典,必須要學習的算法,有些同學,特別新接觸的同學,剛學習時會覺得yolo算法很繁瑣。
但我發(fā)現(xiàn),網上很多的教程其實講的還是比較籠統(tǒng),并不適合小白學習。
所以大白也在耗盡洪荒之力,在準備Yolov3和Yolov4及相關的基礎入門視頻,讓大家看完就能明白整體的流程和各種算法細節(jié)。
END
整理不易,點贊三連↓