重磅! SLAM從入門到精通系統(tǒng)教程匯總
3D視覺工坊相繼推出了《透徹刨析室內(nèi)、室外激光SLAM關(guān)鍵算法原理、代碼與實戰(zhàn)》、《激光-視覺-IMU-GPS融合SLAM算法:理論推導(dǎo)、代碼講解和實戰(zhàn)》、《徹底搞懂基于LOAM框架的3D激光SLAM:源碼剖析到算法優(yōu)化》、《徹底搞懂視覺-慣性SLAM:VINS-Fusion原理精講與源碼剖析》四門SLAM精品課程,授課老師均為國內(nèi)一線大廠算法工程人員和海內(nèi)外高校博士,所有課程均提供數(shù)據(jù)和源碼!微信掃碼加入學習~
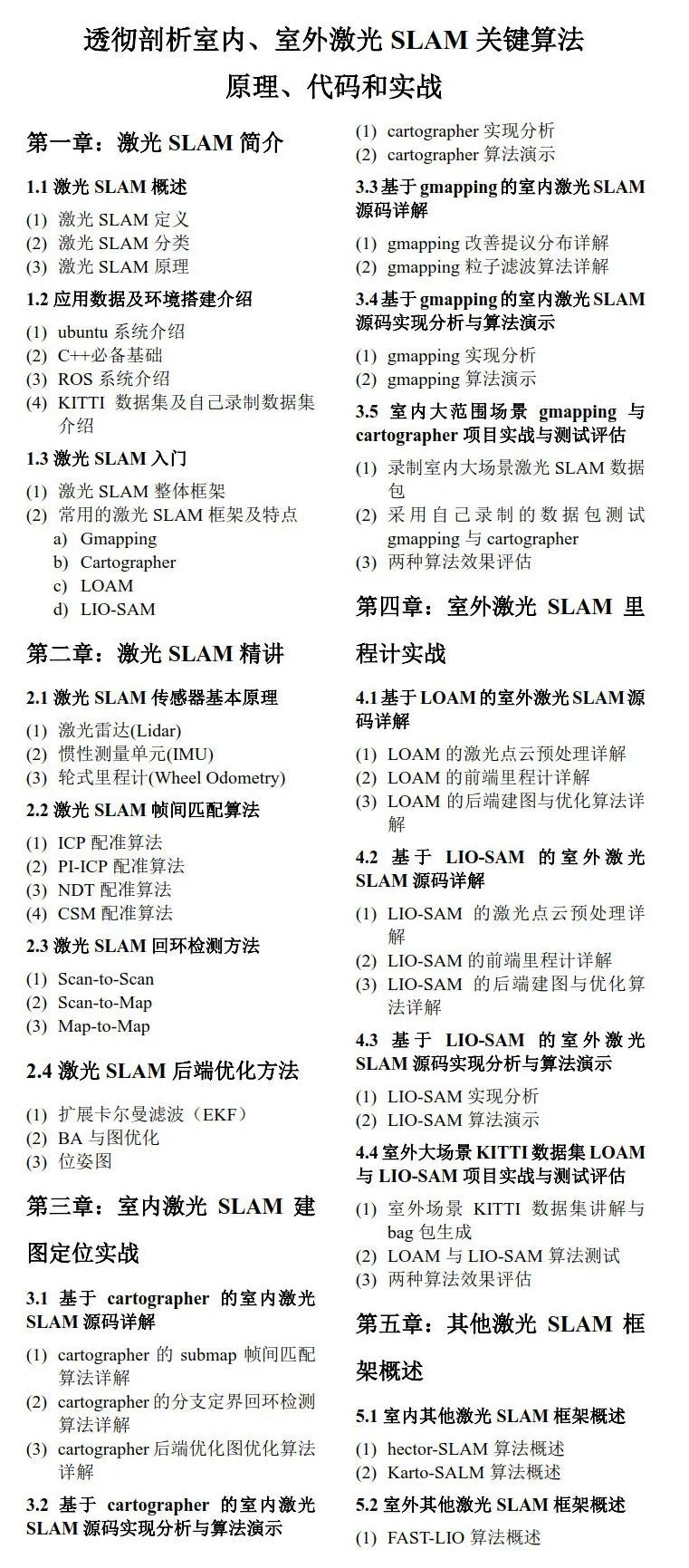
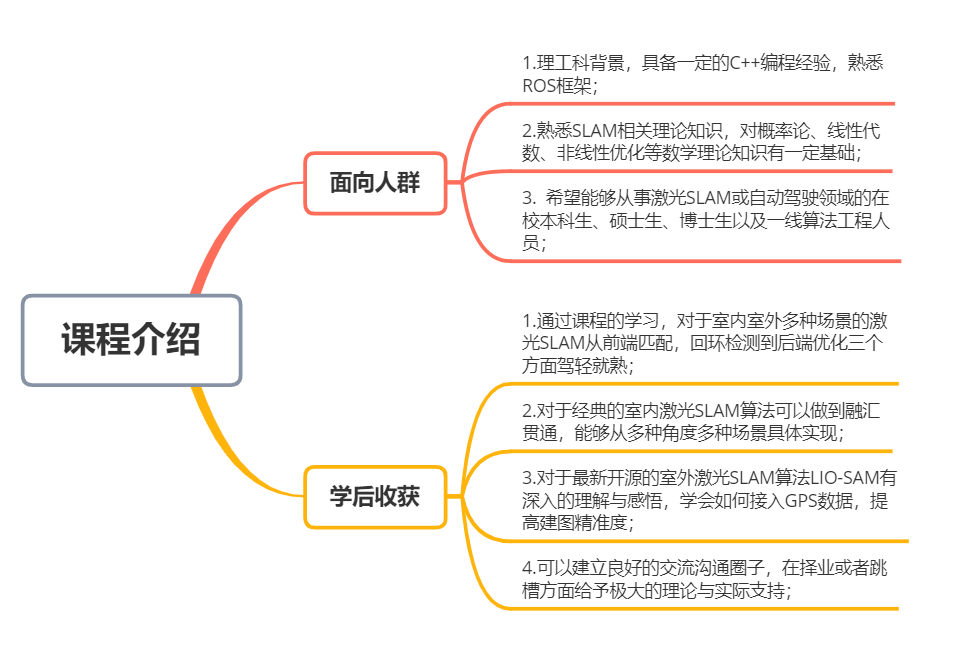
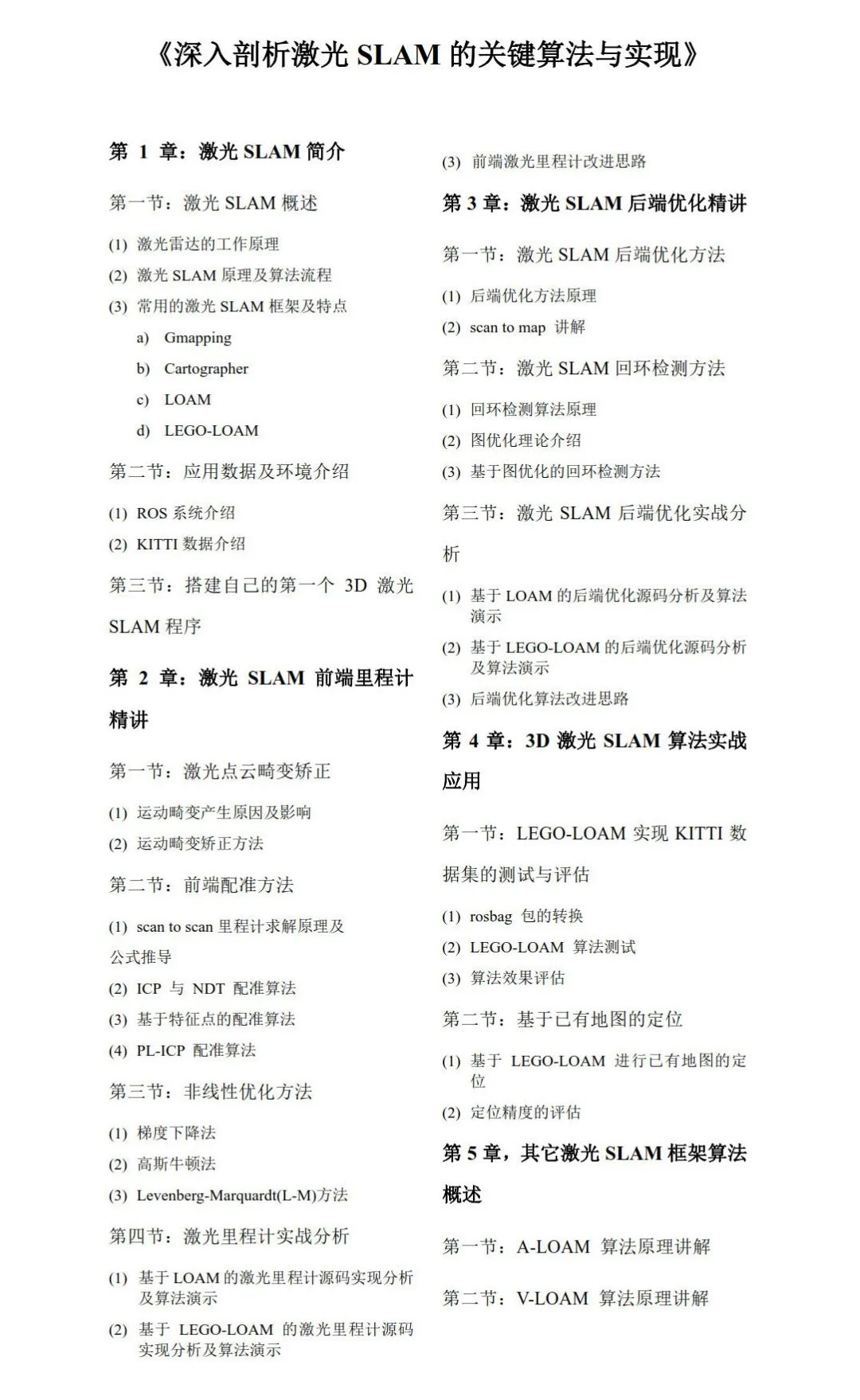
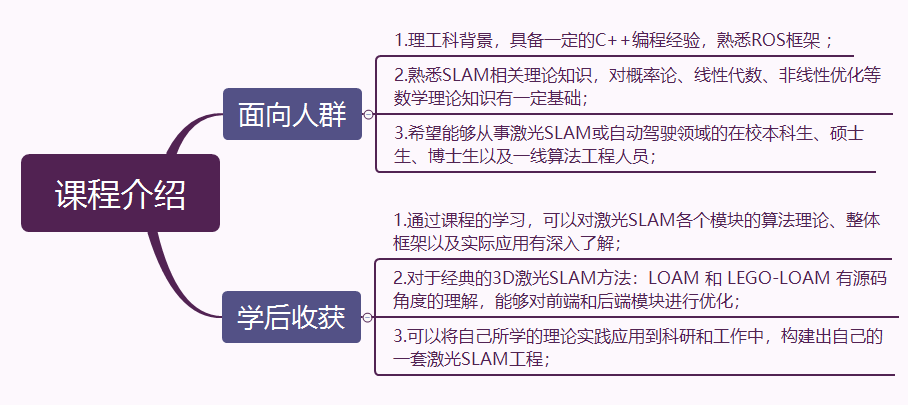
透徹刨析室內(nèi)、室外激光SLAM關(guān)鍵算法原理、代碼與實戰(zhàn)
▲微信掃碼可查看、購買、學習課程
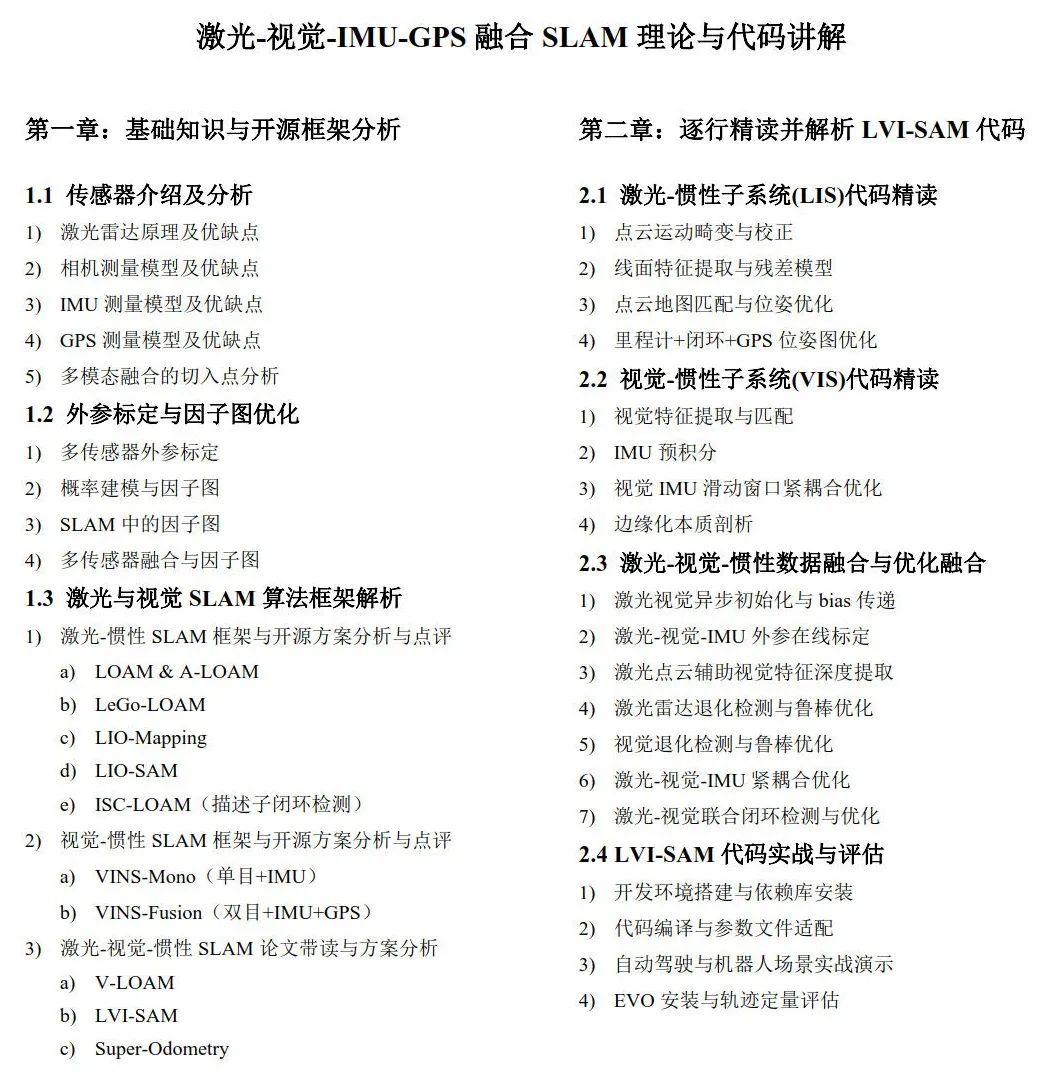
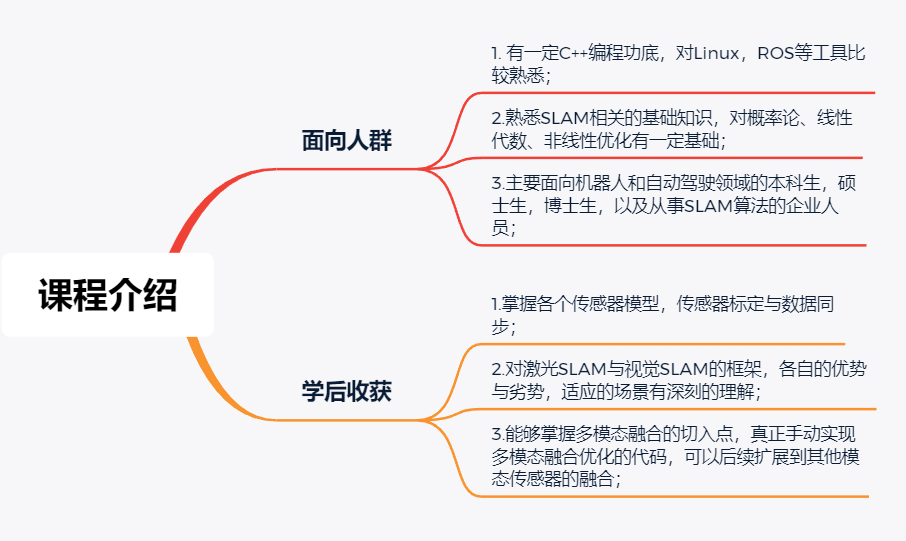
激光-視覺-IMU-GPS融合SLAM算法:理論推導(dǎo)、代碼講解和實戰(zhàn)
自主導(dǎo)航是機器人與自動駕駛的核心功能,而SLAM技術(shù)是實現(xiàn)自主導(dǎo)航的前提與關(guān)鍵。現(xiàn)有的機器人與自動駕駛車輛往往會安裝激光雷達,相機,IMU,GPS等多種模態(tài)的傳感器,而且已有許多優(yōu)秀的激光SLAM與視覺SLAM算法。但是每種模態(tài)的傳感器都有其優(yōu)點和缺點,如相機只能測量2D圖像,且容易受光照和夜晚的影響;激光雷達獲取的3D點云較為稀疏,而且在長走廊,隧道,以及開闊場景中容易發(fā)生退化;GPS測量極易受到環(huán)境的干擾;每種模態(tài)的傳感器只能在適當?shù)沫h(huán)境中發(fā)揮積極的作用。因此,我們希望以適當?shù)姆绞饺诤隙喾N模態(tài)的測量,通過優(yōu)勢互補,使SLAM算法能夠在各種挑戰(zhàn)性環(huán)境下持續(xù)輸出魯棒且精確的估計結(jié)果。因此無論是學術(shù)界還是工業(yè)界,多模態(tài)融合是未來SLAM發(fā)展的必然趨勢。
▲微信掃碼可查看、購買、學習課程
徹底搞懂基于LOAM框架的3D激光SLAM:源碼剖析到算法優(yōu)化
▲微信掃碼可查看、購買、學習課程
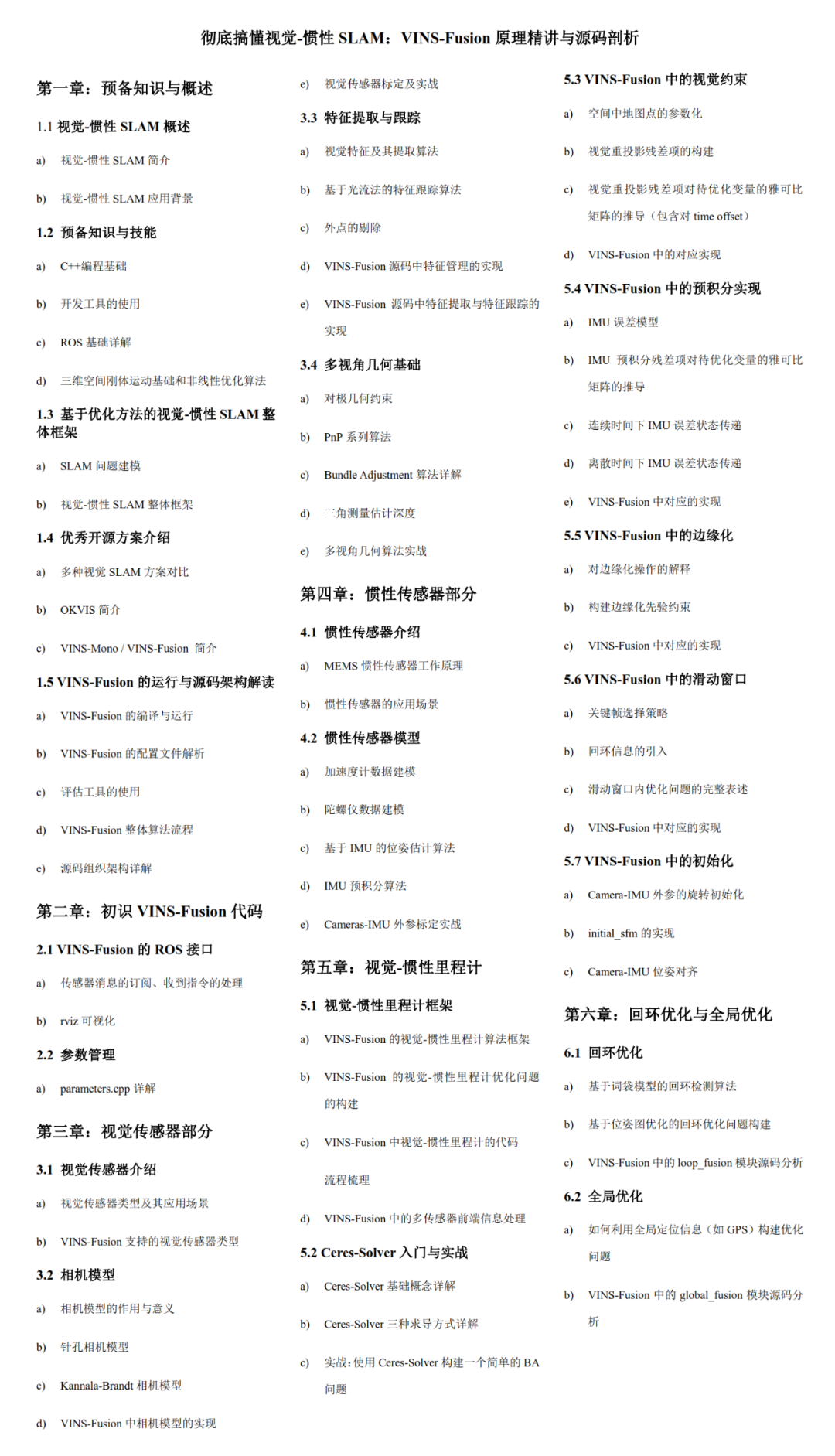
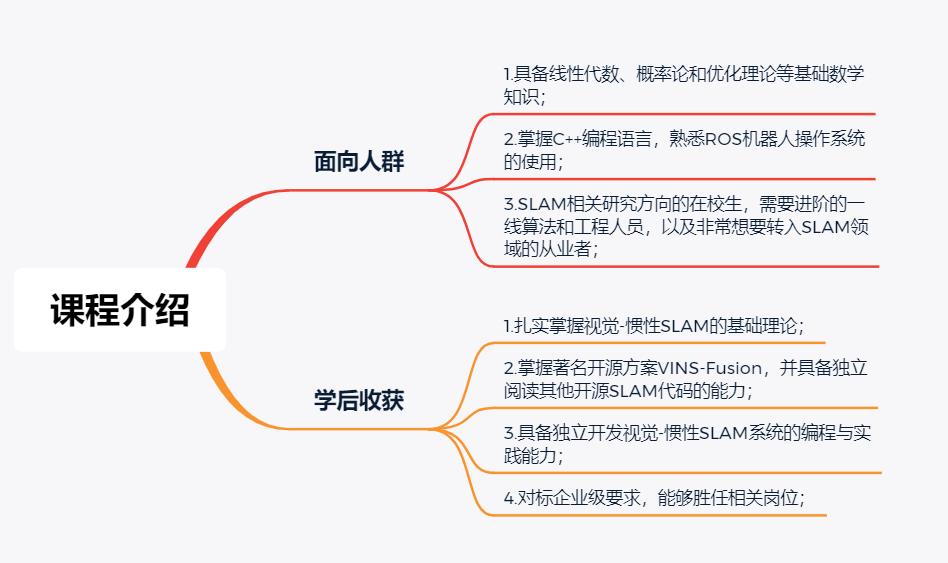
徹底搞懂視覺-慣性SLAM:VINS-Fusion原理精講與源碼剖析