
機(jī)器視覺(jué)產(chǎn)業(yè)鏈全解析
點(diǎn)擊上方“小白學(xué)視覺(jué)”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)



機(jī)器視覺(jué)(Machine Vision)指的是通過(guò)光學(xué)的裝置和非接觸的傳感器自動(dòng)的接收和處理真實(shí)物體的圖像,以獲得所需信息或控制機(jī)器人運(yùn)動(dòng)的裝置,通俗的說(shuō)就是應(yīng)用在工業(yè)領(lǐng)域的視覺(jué)應(yīng)用。

▲機(jī)器視覺(jué)系統(tǒng)組成
另一個(gè)當(dāng)下關(guān)注度非常高的概念計(jì)算機(jī)視覺(jué)(Computer Vision)主要強(qiáng)調(diào)的是讓計(jì)算機(jī)具備對(duì)客觀三維場(chǎng)景的感知、識(shí)別和理解(側(cè)重對(duì)質(zhì)的分析),例如無(wú)人駕駛、人臉識(shí)別等都可以歸類為計(jì)算機(jī)視覺(jué)的范疇。
目前,機(jī)器視覺(jué)的基礎(chǔ)功能主要可以分為四大類:模式識(shí)別/計(jì)數(shù)、視覺(jué)定位、尺寸測(cè)量和外觀檢測(cè),當(dāng)前的應(yīng)用也基本是基于這四大類功能來(lái)展開(kāi)。
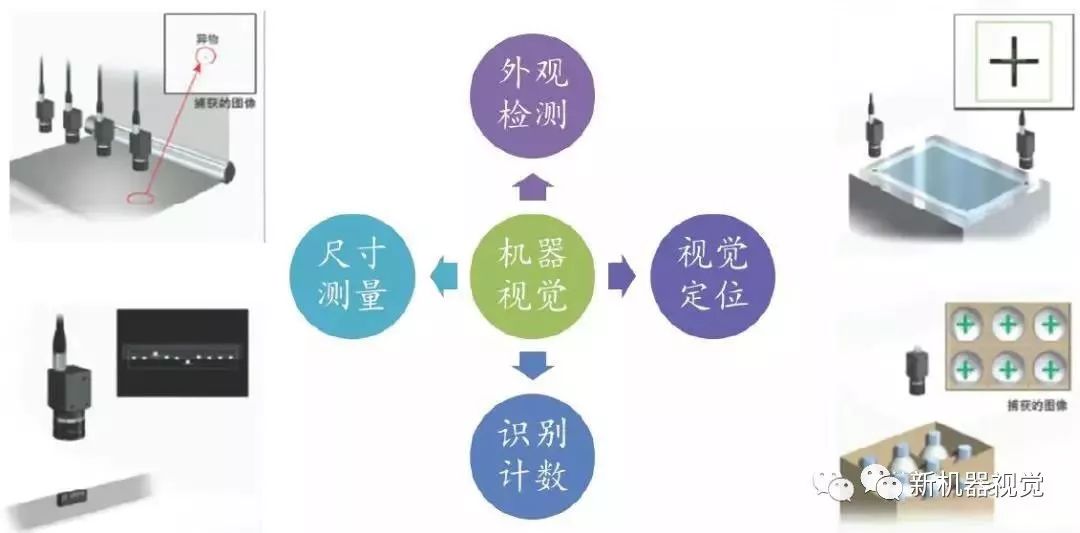
▲機(jī)器視覺(jué)的四大基本功能
模式識(shí)別/計(jì)數(shù)主要指對(duì)已知規(guī)律的物品進(jìn)行分辨,比較容易的包含外形、顏色、圖案、數(shù)字、條碼等的識(shí)別,也有信息量更大或更抽象的識(shí)別如人臉、指紋、虹膜識(shí)別等。
視覺(jué)定位主要指在識(shí)別出物體的基礎(chǔ)上精確給出物體的坐標(biāo)和角度信息。定位在機(jī)器視覺(jué)應(yīng)用中是非常基礎(chǔ)且核心的功能,一個(gè)軟件的好壞大概率與其定位算法的好壞密切相關(guān)。
尺寸測(cè)量主要指把獲取的圖像像素信息標(biāo)定成常用的度量衡單位,然后在圖像中精確的計(jì)算出需要知道的幾何尺寸。優(yōu)勢(shì)在于對(duì)高精度、高通量以及復(fù)雜形態(tài)的測(cè)量,例如有些高精度的產(chǎn)品由于人眼測(cè)量困難以前只能抽檢,有了機(jī)器視覺(jué)后就可以實(shí)現(xiàn)全檢了。
外觀檢測(cè)主要檢測(cè)產(chǎn)品的外觀缺陷,最常見(jiàn)的包括表面裝配缺陷(如漏裝、混料、錯(cuò)配等)、表面印刷缺陷(如多印、漏印、重印等)以及表面形狀缺陷(如崩邊、凸起、凹坑等)。由于產(chǎn)品外觀缺陷一般情況下種類繁雜,所以檢測(cè)在機(jī)器視覺(jué)中的應(yīng)用中屬于相對(duì)較難的一類。
從技術(shù)實(shí)現(xiàn)難度上來(lái)說(shuō),識(shí)別、定位、測(cè)量、檢測(cè)的難度是遞增的,而基于四大基礎(chǔ)功能延伸出的多種細(xì)分功能在實(shí)現(xiàn)難度上也有差異,目前看3D視覺(jué)功能是當(dāng)前機(jī)器視覺(jué)應(yīng)用技術(shù)中最先進(jìn)的方向之一。
簡(jiǎn)單的,我們可以把機(jī)器視覺(jué)產(chǎn)業(yè)鏈可以分為底層開(kāi)發(fā)商(核心零部件和軟件提供商)、集成和軟件服務(wù)商(二次開(kāi)發(fā)),核心零部件及軟件又可以再細(xì)分為光源、鏡頭、工業(yè)相機(jī)、圖像采集卡、圖像處理軟件等。在目前的整個(gè)機(jī)器視覺(jué)系統(tǒng)成本構(gòu)成中,零部件及軟件開(kāi)發(fā)占據(jù)了80%的比例,是產(chǎn)業(yè)鏈中絕對(duì)的核心環(huán)節(jié)和價(jià)值獲取者。
從技術(shù)壁壘來(lái)看,1)軟件是主要壁壘,底層算法庫(kù)是核心。目前是外資企業(yè)壟斷,做得好例如康耐視以及MVTec,主要是靠國(guó)外幾十年的自動(dòng)化進(jìn)程培養(yǎng)起來(lái)的;國(guó)內(nèi)自動(dòng)化進(jìn)程時(shí)間不長(zhǎng),軟件算法還多處于研發(fā)階段,應(yīng)用做得好的不多,2)應(yīng)用層面的技術(shù)也非常關(guān)鍵,主要是要掌握不同應(yīng)用環(huán)境的Know-How,做出適應(yīng)性的產(chǎn)品。
目前來(lái)看,國(guó)內(nèi)機(jī)器視覺(jué)行業(yè)的市場(chǎng)參與者主要有四種類型:國(guó)際綜合自動(dòng)化公司、國(guó)際專業(yè)機(jī)器視覺(jué)公司、國(guó)內(nèi)專業(yè)機(jī)器視覺(jué)公司以及國(guó)內(nèi)自動(dòng)化設(shè)備公司。其中,在底層開(kāi)發(fā)商層面還是國(guó)際企業(yè)占主導(dǎo)地位,國(guó)內(nèi)公司更多是在附加值更低的二次開(kāi)發(fā)層面布局(形式包括系統(tǒng)集成以及組裝生產(chǎn)自動(dòng)化專機(jī)),并在此基礎(chǔ)上逐漸向上游核心環(huán)節(jié)進(jìn)行嘗試。
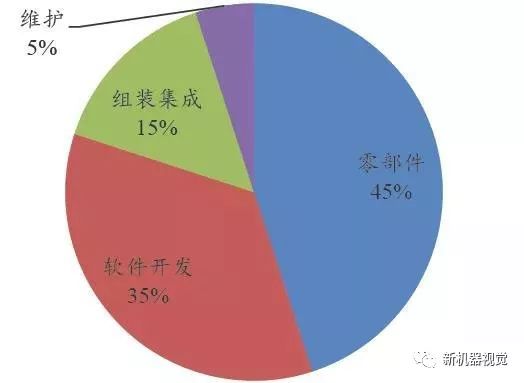
▲機(jī)器視覺(jué)系統(tǒng)成本構(gòu)成
光源是國(guó)產(chǎn)化最充分環(huán)節(jié)。光源的好壞在于對(duì)比度、亮度和對(duì)位置變化的敏感程度,機(jī)器視覺(jué)行業(yè)主要采用LED 光源產(chǎn)品。目前沒(méi)有通用的機(jī)器視覺(jué)照明設(shè)備,針對(duì)每個(gè)特定的應(yīng)用實(shí)例有個(gè)性化的方案,以達(dá)到最佳效果 。目前光源行業(yè)國(guó)產(chǎn)化程度高,競(jìng)爭(zhēng)比較激烈。
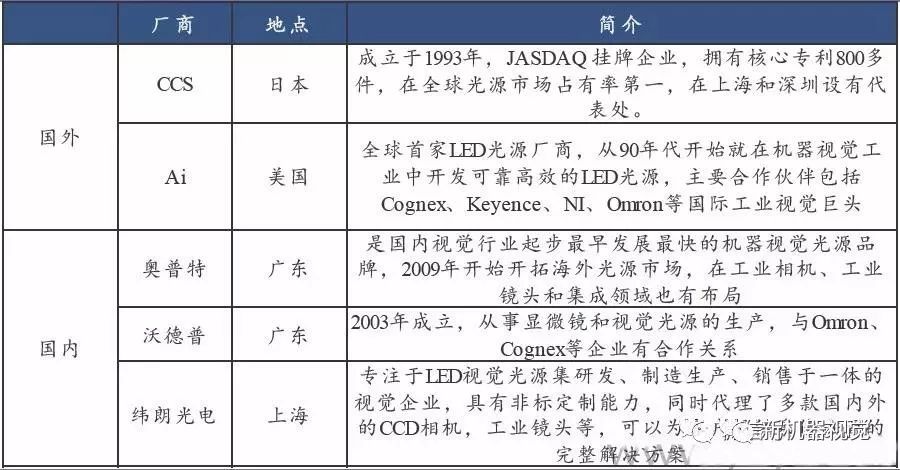
▲內(nèi)外光源參與企業(yè)
低端鏡頭國(guó)內(nèi)企業(yè)具備一定競(jìng)爭(zhēng)力,高端鏡頭基本依賴進(jìn)口。鏡頭的基本功能是實(shí)現(xiàn)光束調(diào)制,將目標(biāo)成像在圖像傳感器的光敏面上完成信號(hào)傳遞。工業(yè)鏡頭主要可以分為定焦鏡頭、定倍鏡頭、遠(yuǎn)心鏡頭、連續(xù)變倍鏡頭等,不同的鏡頭根據(jù)要求應(yīng)用于不同的工業(yè)現(xiàn)場(chǎng),價(jià)格差距也較大。
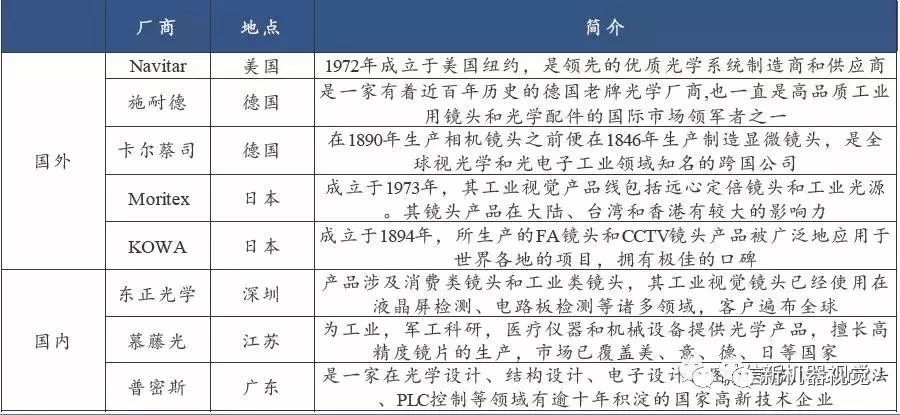
▲國(guó)內(nèi)外鏡頭參與企業(yè)
工業(yè)相機(jī)以歐美進(jìn)口為主,國(guó)產(chǎn)品牌從低端市場(chǎng)開(kāi)始逐步進(jìn)口替代。工業(yè)相機(jī)是工業(yè)視覺(jué)系統(tǒng)的核心部件,其本質(zhì)功能完成是將光信號(hào)轉(zhuǎn)變成電信號(hào)的過(guò)程,要求更高的傳輸力、抗干擾力以及穩(wěn)定的成像能力。
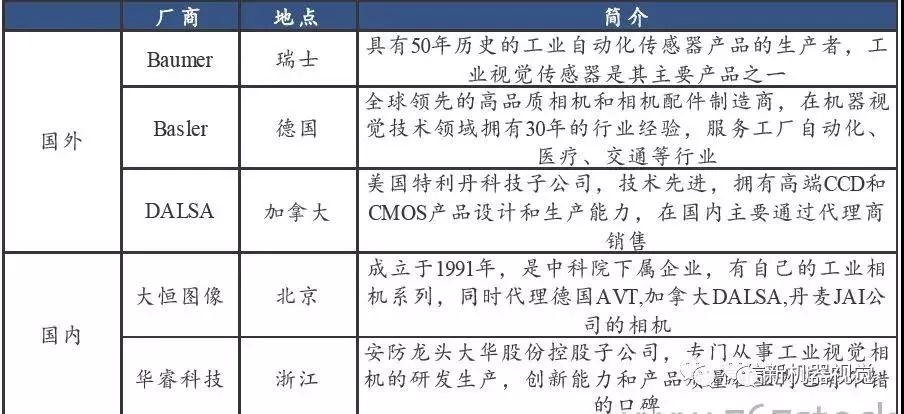
▲國(guó)內(nèi)外工業(yè)相機(jī)參與企業(yè)
圖像采集卡國(guó)內(nèi)發(fā)展較為完善和成熟,也稱為視頻抓取卡,這個(gè)部件通常是一張插在 PC 上的卡。這張采集卡的作用將攝像頭與 PC 連接起來(lái)。它從攝像頭中獲得數(shù)據(jù)(模擬信號(hào)或數(shù)字信號(hào)),然后轉(zhuǎn)換成PC 能處理的信息。
圖像處理軟件基本被國(guó)外企業(yè)壟斷,國(guó)內(nèi)企業(yè)在二次開(kāi)發(fā)中有所布局。工業(yè)視覺(jué)軟件則對(duì)數(shù)字信號(hào)進(jìn)行各種運(yùn)算來(lái)抽取目標(biāo)的特征,進(jìn)而根據(jù)判別的結(jié)果來(lái)控制現(xiàn)場(chǎng)的設(shè)備動(dòng)作,自動(dòng)完成對(duì)圖像采集、顯示、存儲(chǔ)和處理。當(dāng)前比較流行的開(kāi)發(fā)模式是“軟件平臺(tái)+視覺(jué)開(kāi)發(fā)包”,開(kāi)發(fā)包是基于軟件平臺(tái)對(duì)常用各種圖像處理算法進(jìn)行了封裝,軟件工程師可以直接調(diào)用封裝好的算法實(shí)現(xiàn)各種復(fù)雜的圖像處理功能,降低二次開(kāi)發(fā)難度和工作量。

▲國(guó)內(nèi)外圖像處理軟件參與企業(yè)
國(guó)內(nèi)廠商在集成端發(fā)展迅速,尤其是在一些外資還沒(méi)有布局的領(lǐng)域、或者非標(biāo)自動(dòng)化領(lǐng)域如3C 等。國(guó)內(nèi)集成廠商單純進(jìn)行二次開(kāi)發(fā)利潤(rùn)空間較小,在某一行業(yè)下游完成良好布局之后,會(huì)嘗試逐步向上游底層開(kāi)發(fā)延伸,進(jìn)行核心軟硬件的進(jìn)口替代。
機(jī)器視覺(jué)廣泛應(yīng)用于電子及半導(dǎo)體、汽車制造、食品包裝、制藥等領(lǐng)域,其中電子汽車和電子是當(dāng)前機(jī)器視覺(jué)最重要的應(yīng)用領(lǐng)域。
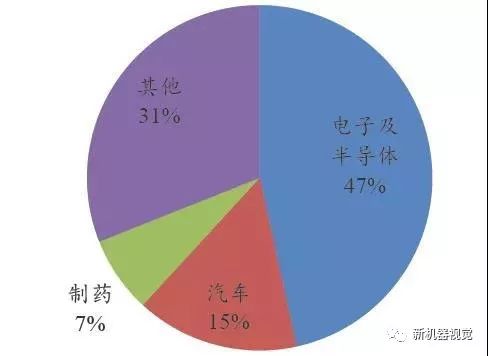
▲全球機(jī)器視覺(jué)下游需求結(jié)構(gòu)

根據(jù)前瞻研究院數(shù)據(jù),電子行業(yè)貢獻(xiàn)了機(jī)器視覺(jué)近50%左右的需求,主要用于晶圓切割、3C表面檢測(cè)、觸摸屏制造、AOI光學(xué)檢測(cè)、PCB印刷電路、電子封裝、絲網(wǎng)印刷、SMT表面貼裝、SPI錫膏檢測(cè)、半導(dǎo)體對(duì)位和識(shí)別等的高精度制造和質(zhì)量檢測(cè)。
以iPhone為例,其生產(chǎn)全過(guò)程就需70套以上系統(tǒng)。未來(lái)在全球智能手機(jī)、平板電腦和可穿戴設(shè)備等消費(fèi)電子領(lǐng)域的需求有望爆發(fā)。
以3C行業(yè)為例,我們判斷未來(lái)行業(yè)的機(jī)器視覺(jué)需求還會(huì)持續(xù)較快增長(zhǎng),主要需求來(lái)自幾個(gè)方面:1)視覺(jué)技術(shù)進(jìn)步(現(xiàn)在好多玻璃、屏的缺陷檢測(cè)技術(shù)上還不能實(shí)現(xiàn))推動(dòng)適用領(lǐng)域拓寬;2)隨著國(guó)內(nèi)智能手機(jī)逐漸中高端化帶來(lái)手機(jī)廠商利潤(rùn)率提升,視覺(jué)檢測(cè)在國(guó)產(chǎn)手機(jī)產(chǎn)線中的應(yīng)用有望推廣開(kāi)來(lái)。
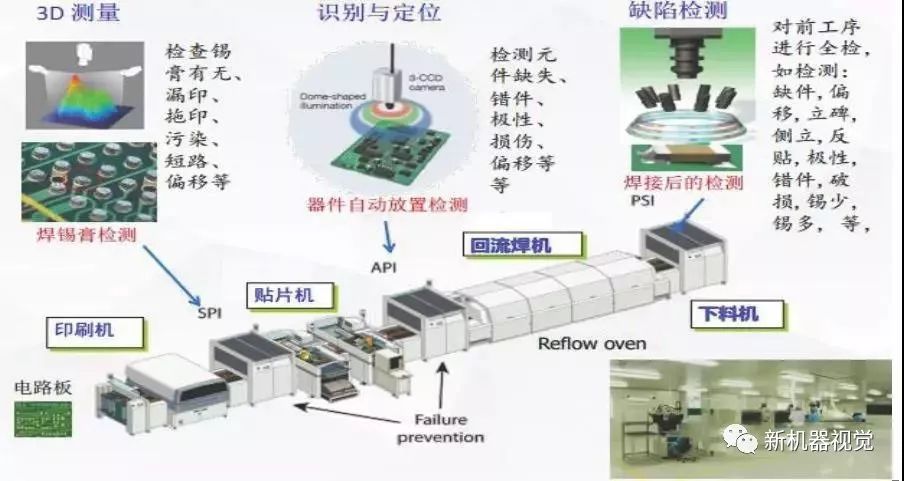
▲機(jī)器視覺(jué)在SMT裝配線上的典型應(yīng)用
根據(jù)前瞻研究院數(shù)據(jù),汽車行業(yè)貢獻(xiàn)了機(jī)器視覺(jué)15%左右的需求,主要用于車身裝配檢測(cè)、面板印刷質(zhì)量檢測(cè)、字符檢測(cè)、零件尺寸的精密測(cè)量、工件表面缺陷檢測(cè)、自由曲面檢測(cè)、間隙檢測(cè)等幾乎所有系統(tǒng)和部件的制造流程。目前一條產(chǎn)線大概配備十幾個(gè)機(jī)器視覺(jué)系統(tǒng),未來(lái)隨著汽車質(zhì)量把控、汽車智能化、輕量化趨勢(shì)對(duì)檢測(cè)提出更高要求,對(duì)機(jī)器視覺(jué)技術(shù)的需求還會(huì)逐步提高。
例如,3D視覺(jué)系統(tǒng)可以以高精度測(cè)量間隙并對(duì)準(zhǔn)每一輛車,并對(duì)裝配的所有車門和車身進(jìn)行全面檢測(cè)。3D 視覺(jué)系統(tǒng)還能幫助底盤制造商使貨架中車身板件的上架、下架和檢測(cè)實(shí)現(xiàn)自動(dòng)化,在自動(dòng)設(shè)備拾取缺陷元件之前檢測(cè)貨架上是否存在缺陷元件,從而減少將缺陷元件焊接到一起。
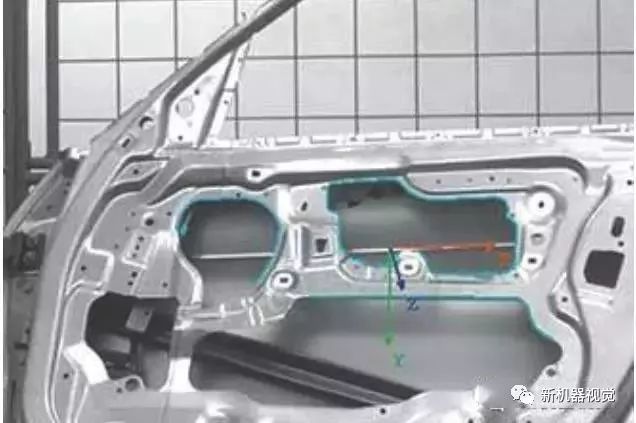
▲機(jī)器視覺(jué)在車身檢測(cè)領(lǐng)域的應(yīng)用
根據(jù)前瞻研究院數(shù)據(jù),制藥行業(yè)貢獻(xiàn)了機(jī)器視覺(jué)7%左右的需求,主要應(yīng)用在藥瓶封裝缺陷檢測(cè)、膠囊封裝質(zhì)量檢測(cè)、藥粒卻是檢測(cè)、生產(chǎn)日期打碼檢測(cè)、藥片顏色識(shí)別及分揀等。目前大多數(shù)企業(yè)流水線上有1-2套機(jī)器視覺(jué)系統(tǒng),而實(shí)際需求至少應(yīng)該在5處,未來(lái)隨著制藥行業(yè)自動(dòng)化升級(jí)改造提速,滲透率會(huì)持續(xù)提升。
例如,在藥品包裝后的檢測(cè)環(huán)節(jié)中,可以利用機(jī)器視覺(jué)快速、準(zhǔn)確地檢測(cè)到對(duì)象是否完好無(wú)缺,通過(guò)設(shè)定圖像傳感器,獲取包裝后的對(duì)象圖片信息,通過(guò)預(yù)先設(shè)定的面積參數(shù)對(duì)每個(gè)藥粒或者藥瓶進(jìn)行檢測(cè)對(duì)比,這樣,破損的藥粒或者缺瓶的包裝都將被檢測(cè)出來(lái),正確的正常通過(guò)。

▲藥粒泡罩檢測(cè)示意圖
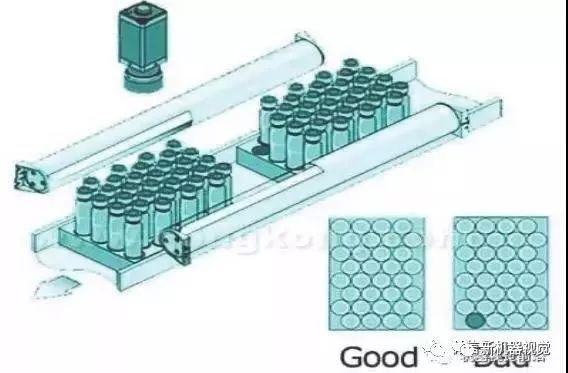
▲缺瓶檢測(cè)示意圖
食品及包裝也是機(jī)器視覺(jué)應(yīng)用的重要下游領(lǐng)域,主要用于高速檢測(cè)、外觀封裝檢測(cè)、食品封裝缺漏檢測(cè)、外觀和內(nèi)部質(zhì)量檢測(cè)、分揀與色選等,單條產(chǎn)線用量在不同產(chǎn)品中差異較大。目前機(jī)器視覺(jué)在大型食品企業(yè)(如伊利、蒙牛)中應(yīng)用較多,而在行業(yè)整體的滲透率并不高。
例如,歐洲鮮貨市場(chǎng)廣泛使用食品分揀器,一般采用多臺(tái)攝像機(jī)捕獲產(chǎn)品整個(gè)表面影像。當(dāng)產(chǎn)品基本為圓形時(shí),在漏洞內(nèi)設(shè)有機(jī)構(gòu),讓產(chǎn)品在攝像機(jī)下進(jìn)行旋轉(zhuǎn)。形狀可以根據(jù)最大直徑和最小直徑、比例關(guān)系等進(jìn)行分選。顏色一般根據(jù)已掃描的整個(gè)表面情況來(lái)決定。鑒定方法如簡(jiǎn)單百分比、強(qiáng)度值直方圖、定義最大面積或最小面積等。

▲機(jī)器視覺(jué)在食品行業(yè)中的典型應(yīng)用示意圖
展望未來(lái),機(jī)器視覺(jué)行業(yè)主要有幾個(gè)發(fā)展趨勢(shì):
1)更多更快的圖像數(shù)據(jù)傳輸、更先進(jìn)的軟件算法帶來(lái)實(shí)現(xiàn)數(shù)字化、實(shí)時(shí)化和智能化的性能提升;
2)硬件性能的提升(更高分辨率、更快掃描率等)和產(chǎn)品軟件價(jià)格的下降推動(dòng)機(jī)器視覺(jué)滲透率提升;
3)產(chǎn)品向著小型化、集成化發(fā)展。
好消息,小白學(xué)視覺(jué)團(tuán)隊(duì)的知識(shí)星球開(kāi)通啦,為了感謝大家的支持與厚愛(ài),團(tuán)隊(duì)決定將價(jià)值149元的知識(shí)星球現(xiàn)時(shí)免費(fèi)加入。各位小伙伴們要抓住機(jī)會(huì)哦!

交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺(jué)、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺(jué)SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~