
基于相交線的雙目平面SLAM
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)
論文題目:Stereo Plane SLAM Based on Intersecting Lines
平面特征是SLAM系統(tǒng)中減小漂移誤差的一種穩(wěn)定標(biāo)志。從密集點(diǎn)云中提取平面是一種簡(jiǎn)單、快速的方法,常用于RGB-D相機(jī)或激光雷達(dá)。但是對(duì)于立體相機(jī)來(lái)說(shuō),密集點(diǎn)云的精確高效計(jì)算是一個(gè)難點(diǎn)。本文提出了一種從立體圖像中提取相交線計(jì)算平面參數(shù)的新方法。平面特征普遍存在于人造物體和構(gòu)筑物的表面,具有規(guī)則的形狀和直線的線條。在三維空間中,兩條相交的直線可以確定這樣一個(gè)平面。因此,我們從立體左、右圖像中提取直線段。通過(guò)立體匹配,計(jì)算出三維空間中的端點(diǎn)和直線方向,進(jìn)而計(jì)算出平面。在立體SLAM系統(tǒng)中加入這樣的計(jì)算平面特征可以減小漂移誤差,提高系統(tǒng)性能。我們?cè)诠矓?shù)據(jù)集上測(cè)試了我們提出的系統(tǒng),并與最先進(jìn)的SLAM系統(tǒng)進(jìn)行了比較,證明了它的魯棒性和精確性。
Line 和 plane 特征對(duì)SLAM的作用
現(xiàn)實(shí)環(huán)境中有豐富的線,面特征,他們能在SLAM中作為比較穩(wěn)定的路標(biāo)幫助SLAM提高穩(wěn)定性和準(zhǔn)確性。與線特征相比,平面具有簡(jiǎn)單、魯棒的數(shù)據(jù)關(guān)聯(lián)性,因而更加穩(wěn)定。此外,平面甚至可以在大距離的幀中進(jìn)行匹配,這有助于減小漂移誤差。
Line and plane 提取
線特征提取:
LineSegmentDetector https://www.sciencedirect.com/science/article/abs/pii/S1047320313000874
先用LBD
https://dl.acm.org/doi/10.1016/j.jvcir.2013.05.006
從圖像提取然后追蹤
面特征提取:通常從RGBD或激光雷達(dá)中提取,從雙目匹配提取但是雙目匹配效率太低(可以從當(dāng)前的雙目匹配入手增加效率)
本文提出了一種從立體圖像中計(jì)算平面特征的新方法。平面特征普遍存在于人造物體和結(jié)構(gòu)的表面。這些平面通常有規(guī)則的形狀和直線。在三維空間幾何中,兩條相交的直線可以確定一個(gè)平面。因此,用直線來(lái)計(jì)算平面特征是合理和可行的。立體匹配可以從立體圖像中計(jì)算出三維直線[4]。(作者避免雙目匹配,改用雙目中的線特征來(lái)計(jì)算平面特征)
與直接使用線特征相比,平面特征避免了復(fù)雜的參數(shù)化,實(shí)現(xiàn)了簡(jiǎn)單而穩(wěn)健的數(shù)據(jù)關(guān)聯(lián)。此外,平面也是更精確的地標(biāo):
基于相交線從立體圖像計(jì)算平面特征的新方法。
使用提取點(diǎn)和計(jì)算平面的立體重?fù)粝到y(tǒng)。
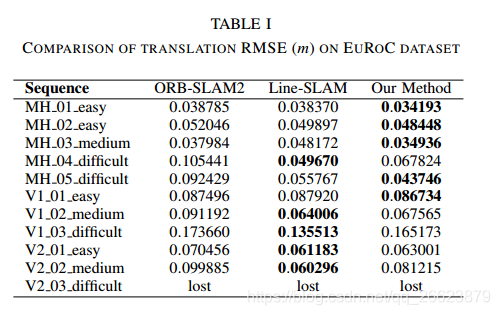
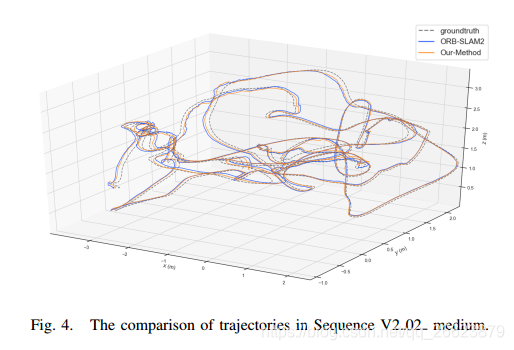
在公共數(shù)據(jù)集上進(jìn)行評(píng)估,我們的系統(tǒng)得到了穩(wěn)健和準(zhǔn)確的估計(jì)結(jié)果,并實(shí)現(xiàn)了最先進(jìn)的性能。
從線特征提取面特征
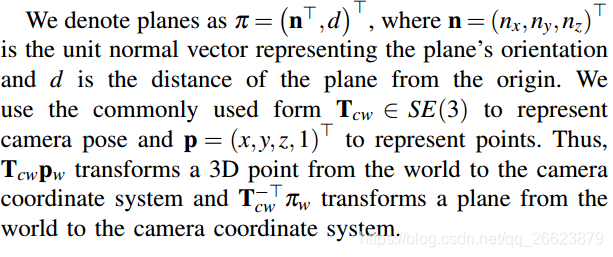
符號(hào)表示
線特征提取計(jì)算

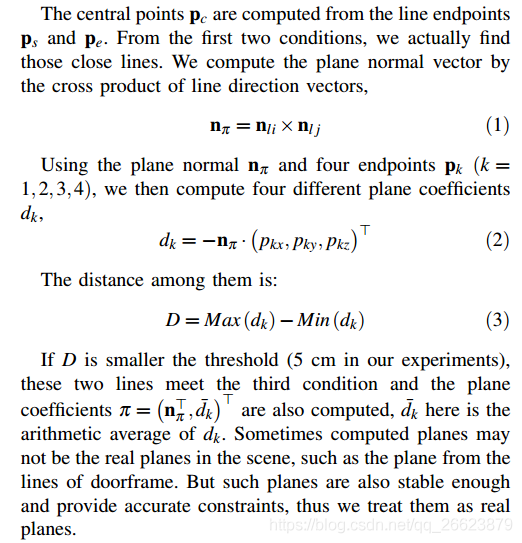
面計(jì)算
從相交線中,找滿足面特征的直線
兩條直線之間的角度大于閾值(在我們的實(shí)驗(yàn)中為10°)
中心點(diǎn)之間的距離小于線長(zhǎng)度。
這兩條直線的四個(gè)端點(diǎn)位于同一平面上。
計(jì)算過(guò)程:
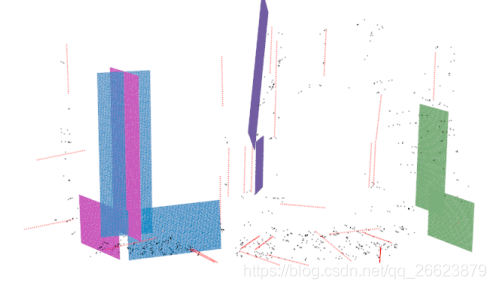
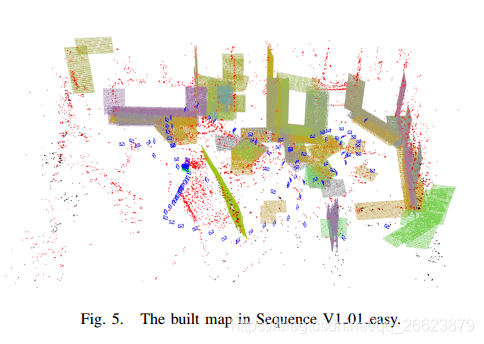
黑點(diǎn)是從立體圖像中提取的特征點(diǎn)。紅線是從立體圖像中提取的線段,其三維位置由匹配的端點(diǎn)計(jì)算。請(qǐng)注意,我們?cè)赟LAM系統(tǒng)中沒有使用這些線段,我們?cè)趫D中繪制它們只是為了顯示計(jì)算平面特征的過(guò)程。我們通過(guò)展開相應(yīng)的相交線來(lái)繪制計(jì)算平面,它們以不同的顏色繪制。由于線段的錯(cuò)誤,圖中的紫色平面似乎不正確,我們將在稍后的檢查中將此平面標(biāo)記為無(wú)效。但其他飛機(jī)似乎是正確的,將被用作我們的大滿貫系統(tǒng)的有效地標(biāo)。
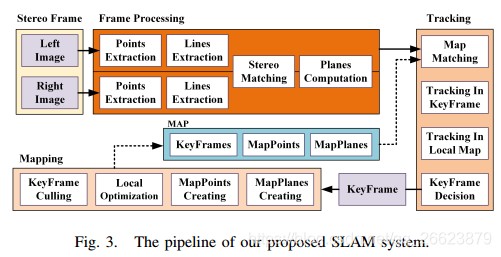
系統(tǒng)結(jié)構(gòu)
優(yōu)化

交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~